Изобретение относится к моделиро ванию с применением электронных вычислительных машин и может быть использовано при создании тренажеров водителя транспортных средств и в исследовательских стендах,предназна ченных для обучения и тренировки экипажей по управлению транспортным средством, например самолетом. Известны тренажеры с подвижной кабиной, кинематически связанной с управляемыми силовыми приводами, обеспечивающими ее перемещение с помощью вычислителя 1 и L23. Наиболее близким к предлагаемому по технической сущности является тренажер, содержащий подвижную плат форму с кабиной на управляемых сило вых приводах, обеспечивающих ее перемещение, и управляющие силовыми приводами вычислитель, полосовой фильтр, инвертор, сумматор, формирователь управляющих импульсов К. недостаткам известного тренажера относится потеря части акселерационной информации, воспринимаемой оператором, например в реальном полете. Это объясняется тем, что из-за конструктивных и динамических ограничений исполнительных приводов невозможно воспроизводить перемещение с амплитудами, выходящими за указанные пределы, в случае же масштабирования (уменьшения), по сравнению с реальным, величины воспроизводимого сигнала во всем диапазоне, часть полезной акселерационной информации восприниматься человеком не будет, так как станет ниже порога его чувствительности. Цель изобретения - повышение точности тренажера за счет приближения имитируемых условий к реальным. Указанная цель достигается тем, что в устройство, содержащее последовательно включенные формирователь управляющих импульсов, исполнительные механизмы, пульт оператора и вычислитель, первый выход которого соединен со вторым входом пульта оператора, а также полосовой фильтр блок суммирования и инвертор, введены последовательно включенные интегратор и нелинейный преобразователь, выход которого соединен с первым входом блока суммирования, второй вход которого через инвертор подключен ко второму выходу интегратора, третий вход блока суммирования через полосовой фильтр соединен со вторым выходом вычислителя, а выход блока суммирования соединен со входом интегратора, третий выход которого подключен ко входу формирователя управляющих импульсов.
В основу работы предлагаемого тренажера заложен следующий принцип , Из вычисленного сигнала ускорения с помо1дью фильтра высоких частот отсеивается низкочастотная составляющая, как не несущая акселерацнонной информации, воспринимаемой человеком, затем для получения упраляющего сигнала, соответствующего перемещению кабины тренажера, профильтрованный сигнал ускорения дважды интегрируется, при этом из входного сигнала ускорения непрерьшно вычитается сигнал возврата, причем функциональная зависимость величины ускорения возврата от величины сигнала перемещения кабины - нелинейная, что позволяет имитировать малы перемещения близко к реальным, а перемещения с большими ускорениями плавно ограничиваются, причем весь процесс происходит непрерывно, без коммутации.
Предлагаемое устройство может бы использовано в тренажерах с различным количеством степеней свободы, в этом случае канал формирования управляющих сигналов по каждой степени свободы вьшолняется в соответствии с изобретением. Величина зоны Ijj , в которой перемещения кабины тренажера могут полностью соответствовать перемещениям имитируемого реального объекта (т.е. коэффициент передачи К 1 , при Л1 1о), зависит от динамических возможностей исполнительных приводов тренажера р
«тс.х м«...e.e.;,
тах
где a
максимальное ускорение,
max развиваемое исполнительным приводом тренажера;
UJ максимальная круговая часmaxтота при гармоническом перемещении кабины тренажера с амплитудой;
V максимальная скорость,
max развиваемая исполнительным приводом тренажера. В зоне, в которой амплитуда перемещения кабины тренажера из-за конструктивных и динамических ограничений исполнительных приводов должна быть уменьшена, коэффициент передачи
Д1 - 1о
определяется как К 1
при А 1 1 о,
гдеД - использованная часть хода
исполнительного привода; 1 - диапазон перемещения исполни т ель ног о прив ода. Так как движение физического тела, в том числе кабины тренажера, можно представить гармоническим рядом Фурье, амплитудное значение перемещения кабины 1уло)У связано с амплитудой ускорения круговой частотой Ut} для каждой гармонической
1 - 3. max составляющей выражением -l- Qymu
отсюда можно определить частоту среза Шо фильтра высоких частот
. VT со
Уупах 1 -tnoax 2- 1 -1InoOIX - lynCtX
амплитудное значение допоа гдерогового (неощущаемого человеком) ускорения. Крутизна фильтра высоких частот для Ct) должна при этом быть не менее +40 дБ/дек, т.е. амплитуда колебаний должна уменьшаться пропорционально квадрату круговой частоты при Ц) (J0( , 1Щя исключения выхода исполнительных приводов на упоры, с этой же целью крутизна фильтра высоких частот для (при условии
) должна быть не менее +20 дБ/дек.
Такая частотная характеристика может быть .реализована фильтром с передаточной функцией
W,
СР)
(ТР + 1)2
оператор дифференцирогде р вания,
т
постоянная времени
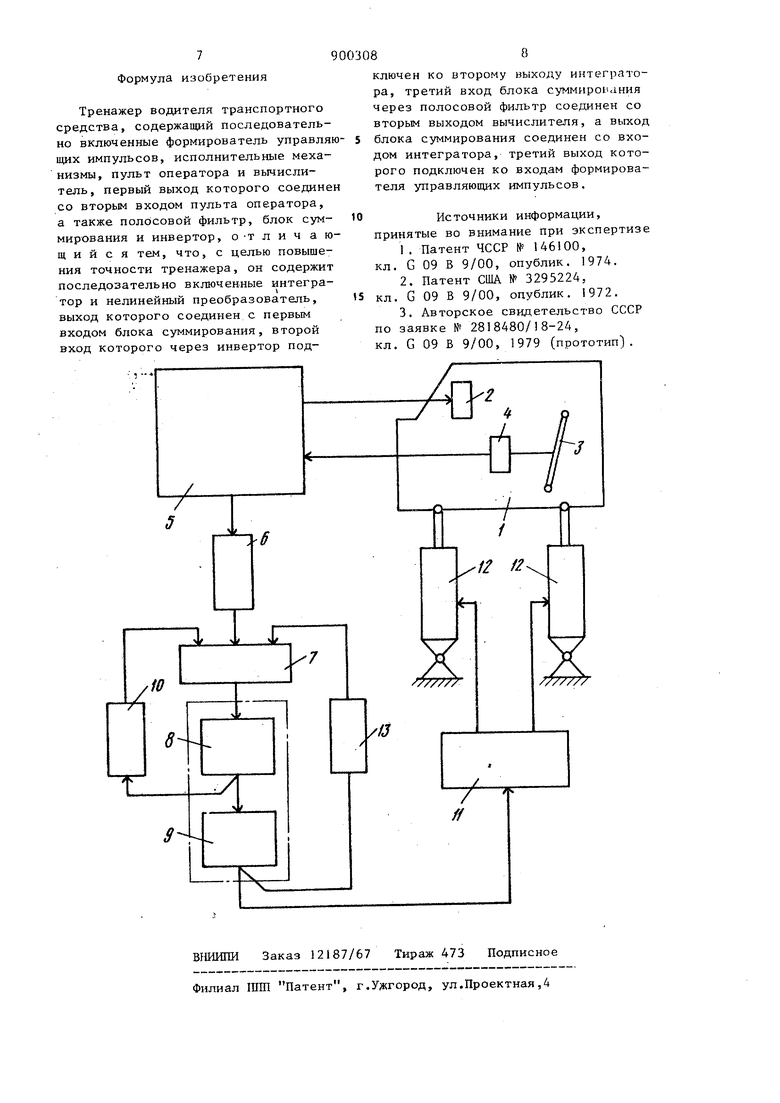
we фильтра. На чертеже приведена структурна схема тренажера. Пульт 1 оператора содержит приб ры 2 контроля и орган 3 управления кинематически связанный с датчиком 4 его положения. Выход датчика 4 соединен со входом вычислителя 5. Приборы 2 соединены с первым выход вычислителя 5 (параметров движения имитируемого реального объекта), причем выход вычислителя 5 соедине со входом полосового фильтра 6 (вы соких частот), выход которого соед нен с входом блока 7 суммирования, выход которого соединен со входом первого блока 8 интегрирования, выход которого соединен с входом второго блока 9 интегрирования и входом инвертора 10, выход которог соединен со входом блока 7, выход блока 9 соединен со входом формиро вателя 11 управляющих импульсов, соединенного с исполнительными механизмами 12, а также нелинейный преобразователь 13, причем блоки 8 и 9 объединены в интегратор 14. Тренажер работает следующим образом. При манипуляции органом 3 управ ления, сигналы с датчика 4 его пол жения поступают в вычислитель 5, откуда сигналы параметров движения имитируемого реального объекта поступают для индикации приборами 2 контроля. Из сигнала, пропорционального вы численному ускорению, с выхода вычислителя 5, с помощью фильтра 6 отсеивается низкочастотная составляющая, как не несущая воспринимаемой человеком акселерационной инфор мации. С выхода фильтра 6 сигнал профильтрованного ускорения поступает на вход блока 7, а затем дважды интегрируется с помощью блоков 8 и 9, т.е. на выходе блока 9 форми руется сигнал, пропорциональный перемещению кабины тренажера, в которой размещается пульт 1. Сформирован ый сигнал поступает на вход формирователя 11, а исполнительные механизмы 12 перемещают кабину тренажера, соответственно сигналу с выхода блока 9. По мере увеличения на выходе блока 8 сигнала, пропорционального скорости движения кабины, соответственно увеличивается по абсолютной величине сигнал, поступающий на вход блока 7 с выхода инвертора 10, ослабляя сигнал с выхода фильтра 6, чем достигается уменьщение масштаба воспроизводимой скорости по мере ее приближения к максимально воспроизводимой механизмами 12 величине. Аналогично, по мере увеличения сигнала на выходе блока 9, пропорционального перемещению кабины тренажера, через преобразователь 13 на вход блока 7 поступает сигнал, ослабляющий сигнал с выхода фильтра 6, причем за счет нелинейности характеристики преобразователя 13, при малой величине сигнала с выхода блока 9, т.е. при большом запасе хода механизмов 12, ослабляющий сигнал с выхода преобразователя 13 имеет небольшую по абсолютному значению величину, затем, по мере уменьшения запаса хода механизмов 12, ослабляющий сигнал увеличивает свое абсолютное значение, т.е. при подходе механизмов 12 к значению предельного перемещения, они затормаживаются, исключая их выход на упоры. При изменении на противоположный знак сигнала с выхода фильтра 6, соответственно значению ускорения, полученному в вычислителе 5, сигнал на выходе блока 8 плавно изменяется до нуля, что соответствует торможению и остановке кабины тренажера, затем на выходе блока 8 сигнал меняет знак на противоположный первоначальному, т.е. кабина тренажера начинает перемещаться в направлении, противоположном первоначальному. В том случае,; если сигнал ускорения с выхода датчика 4 имеет постоянную величину или изменяется с малой частотой, при которой отсутствует воспринимаемая Человеком акселерационная информация , сигнал с выхода фильтра 6 принимает нулевое значение, и кабина тренажера плавно занимает исходное положение за счет отрицательной обратной связи через инвертор 10 и преобразователь 13, которой охвачены последовательно включенные блоки 8 и 9. Таким образом, изобретение повышает точность тренажера за счет приближения имитируемых условий к чем обеспечивается высо- реальным, эффективность учебного процескаяса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ПСИХОФИЗИОЛОГИЧЕСКИХ ЭФФЕКТОВ В ТРЕНАЖЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2369909C2 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Способ моделирования динамики полета летательного аппарата | 2024 |
|
RU2820152C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| Имитатор гидроакустических сигналов | 1978 |
|
SU765865A1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
