I
Изобретение относится к машиностроению, а именно к подъемным механизмам.
По основному авт.св. N из. вестен подъемник для обслуживания транспортных средств, содержащий опорную платформу с ходовой частью, грузовую платформу, несущую грузоподъемный орган, например стреловой кран, и опирающуюся на шарнирно-рычажный механизм с силовым цилиндром раздвижения, шарнирно подвешенным на центральной оси шарнирно-рычажного механизма СП.
Недостатком известного подъемника является то, что при приведении его в рабочее состояние монтажник сначала должен установить и закрепить на грузовой платформе ограждение, а также недостаток - раскачивание шарнирно-рычажного механизма и закрепленной на нем грузовой платформы при движении подъемника по дороге.
Цель изобретения - повышение удобства в эксплуатации.
Указанная цель достигается тем, что подъемник снабжен охватывающей грузоиую платформу рамкой со стойками , съеино закрепленными на опорной платформе, и закрепленными на грузовой платформе направляющими с отверстиями, череы которые проходят стойки, причем на опорной платформе закреплены откидные упоры для стоек.
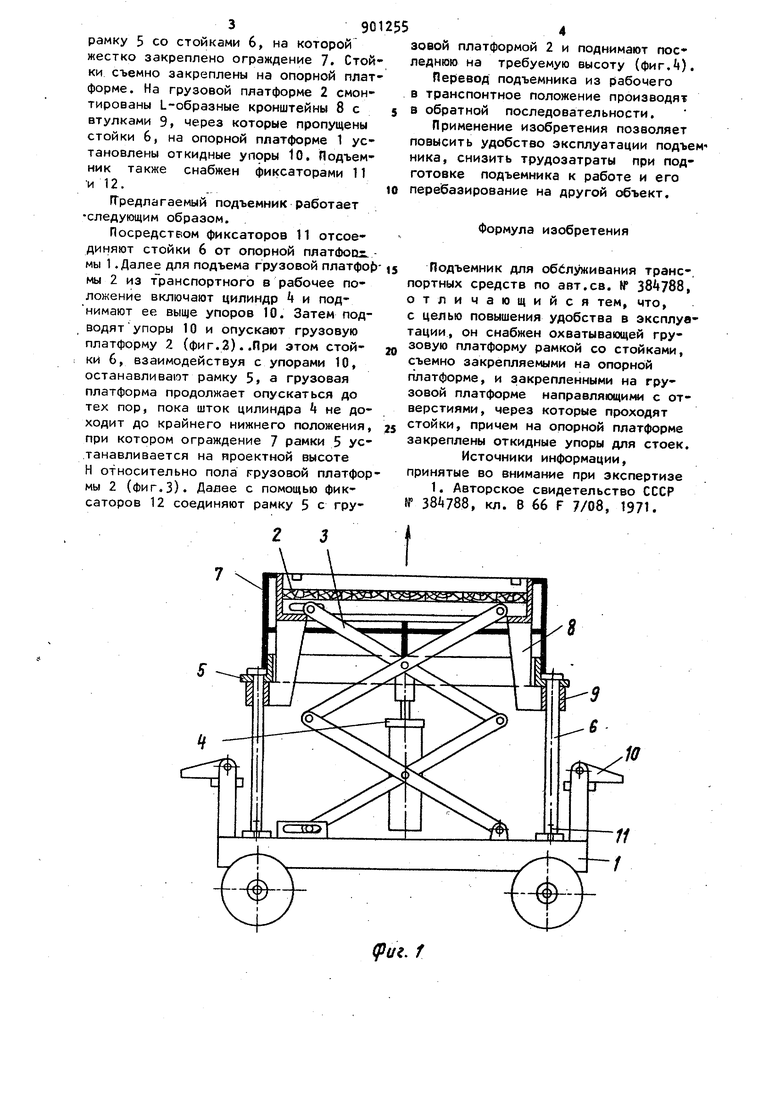
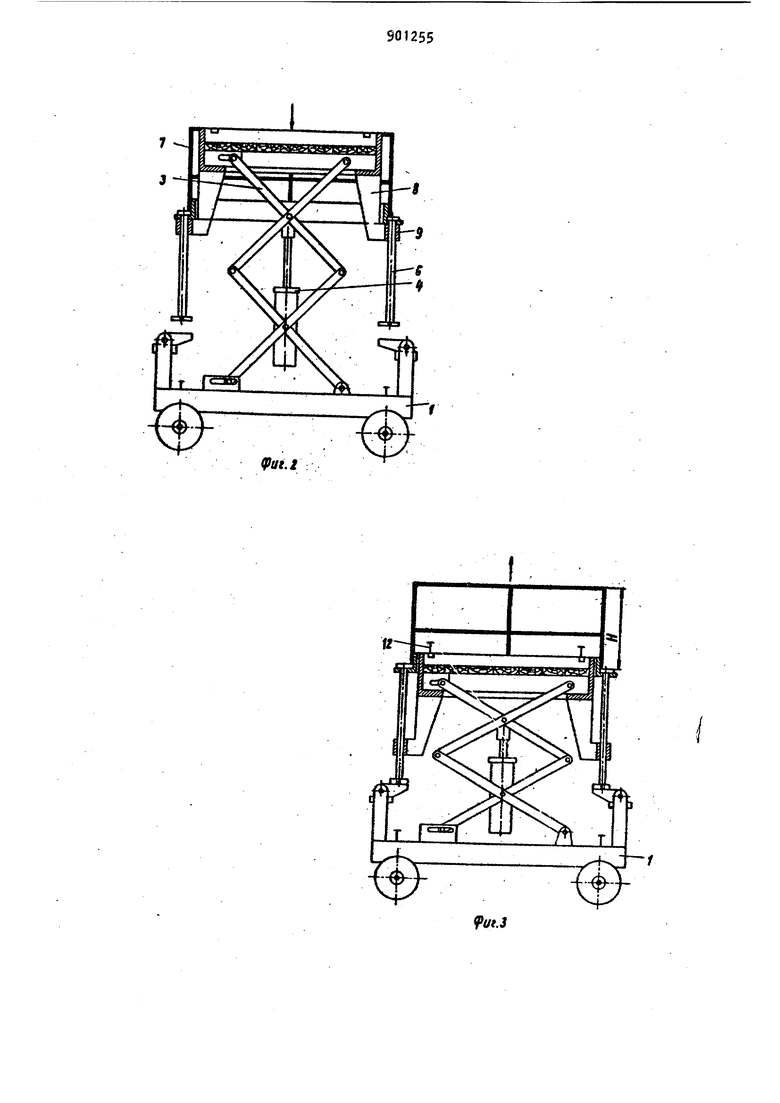
На фиг.1 изображен подъемник в транспортном положении, общий вид; на фиг.2 - положение перед установкой ограждения; на фиг.З - то же, в момент установки ограждения; на фиг. - рабочее положение подъемника.
Подъемник содержит опорную платформу 1 с ходовой частью, грузовую платформу 2, на которой может быть установлен стреловой кран (не показан), , шарнирно-рычажный механизм 3 с шарнирно подвешенным на его центральной оси силовым цилиндром , 390 рамку 5 со стойками 6, на которой жестко закреплено ограждение 7. Стой ки съемно закреплены на опорной плат форме. На грузовой платформе 2 смонтированы L-образные кронштейны 8с втулками 9, через которые пропущены стойки 6, на опорной платформе 1 установлены откидные уп9РЫ Ю, Подъемник также снабжен фиксаторами 11 и 12. ГГредлагаемый подъемник работает следующим образом. Посредством фиксаторов 11 отсоединяют стойки 6 от опорной пяатфоог. мы 1 .Далее для подъема грузовой платфо| мы 2 из транспортного в рабочее положение включают цилиндр k и поднимают ее выще упоров 10. Затем подводят упоры 10 и опускают грузовую платформу 2 (фиг.2)..При этом стойки б, взаимодействуя с упорами 10, останавливают рамку 5 а грузовая платформа продолжает опускаться до тех пор, пока шток цилиндра Ц не доходит до крайнего нижнего положения, при котором ограждение 7 рамки 5 устанавливается на проектной высоте Н относительно пола грузовой платфор мы 2 (фиг.З). Далее с помощью фиксаторов 12 соединяют рамку 5 с грузовой платформой 2 и поднимают последнюю на требуемую высоту (фиг.). Перевод подъемника из рабочего в транспонтное положение производят в обратной последовательности. Применение изобретения позволяет повысить удобство эксплуатации подъемника, снизить трудозатраты при подготовке подъемника к работе и его перебазирование на другой объект. Формула изобретения Подъемник для обслуживания транс-, портных средств по авт.св. № 384788, отличающийся тем, что, с целью повышения удобства в эксплуатации, он снабжен охватывающей грузовую платформу рамкой со стойками, съемно закрепляемыми на опорной платформе, и закрепленными на грузовой платформе направляющими с отверстиями, через которые проходят стойки, причем на опорной платформе закреплены откидные упоры для стоек. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № , кл. В 66 F 7/08, 1971.
ft/г. f
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| ".'О ЗНАЯ•''"'"^"СШ ць** &iSAМ. Кл. В 66f 7/08УДК 621.876.113(088.8) | 1973 |
|
SU384788A1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Башенный кран | 1985 |
|
SU1388382A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| УСТАНОВКА ДЛЯ ПРАВКИ ЛЮКОВ ПОЛУВАГОНОВ | 2005 |
|
RU2291013C1 |
| Поъемник | 1990 |
|
SU1791368A1 |
| Механизм привода перемещения выдвижной секции платформы подъемника | 1986 |
|
SU1370059A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Устройство для подъема и установки стреловых самоходных кранов на мостовом кране | 1984 |
|
SU1270100A1 |
ригЛ
