Фиг.1
Изобретение относится к оборудованию, предназначенному для подъема транспортного средства до уровня пола подвижного состава с целью выгрузки тар- но-штучных грузов, и может быть использо- вано в различных отраслях народного хозяйства.
Известен грузоподъемный стол, содержащий платформу с подъемной площадкой, параллельные друг другу и соединенные между собой пространственной шарнирно- рычажной системой, установленной с возможностью вертикального перемещения приводом и выполненной в виде соединенных осями перекрещивающихся рычагов, одни концы которых шарнирно закреплены, а вторые, соответственно первым, - установлены подвижно на платформе и площадке. Однако известное решение имеет сложную конструкцию вследствие наличия самостоятельного привода и невысокую надежность.
Известен подъемник для машин, содержащий подвижную платформу, смонтированную шарнирно на верхних концах рычагов шарнирно-рычажного механизма, закрепленного на раме с ходовыми колесами, откидной трап, шарнирно связанный с торцовой поверхностью платформы, привод подъема платформы, включающий в себя привод поворота рычагов, кинематически связанный с одним из роликов, смонтированных на платформе для взаимодействия с ведущими колесами устанавливаемого на платформе транспортного средства, при этом оси роликов закреплены в плоскости, параллельной опорной поверхности платформы.
Однако известный подъемник ненадежен в эксплуатации.
Цель изобретения - повышение надеж- ности.
Указанная цель достигается тем, что в подъемник, содержащем подвижную платформу с боковым ограждением, смонтиро- ванную шарнирно на верхних концах рычагов шарнирно-рычажного механизма, закрепленного на раме с ходовыми колесами, откидной трап, шарнирно связанный с торцовой поверхностью платформы, вклю- чающий в себя привод поворота рычагов, кинематически связанный с одним из двух роликов, смонтированных на платформе для взаимодействия с ведущими колесами устанавливаемого на платформе транспор- тного средства, при этом оси первого и второго роликов закреплены в плоскости, параллельной опорной поверхности платформы, согласно изобретения, на платформе шарнирно смонтирован третий ролик,
ось которого закреплена параллельно оси второго ролика и расположена с противоположной стороны по отношению к первому ролику и в одной с ними плоскости, привод поворота рычагов содержит закрепленные на нижней стороне платформы два барабана с параллельными горизонтальными осями вращения, гибкую ленту, навитую на .барабаны, каждый из которых кинематически связан с первым и третьим роликом, соответственно, для принудительного их поочередного вращения, а на одном из рычагов установлен нажимной ролик, для взаимодействия с рулоном гибкой ленты, навитой на один из барабанов.
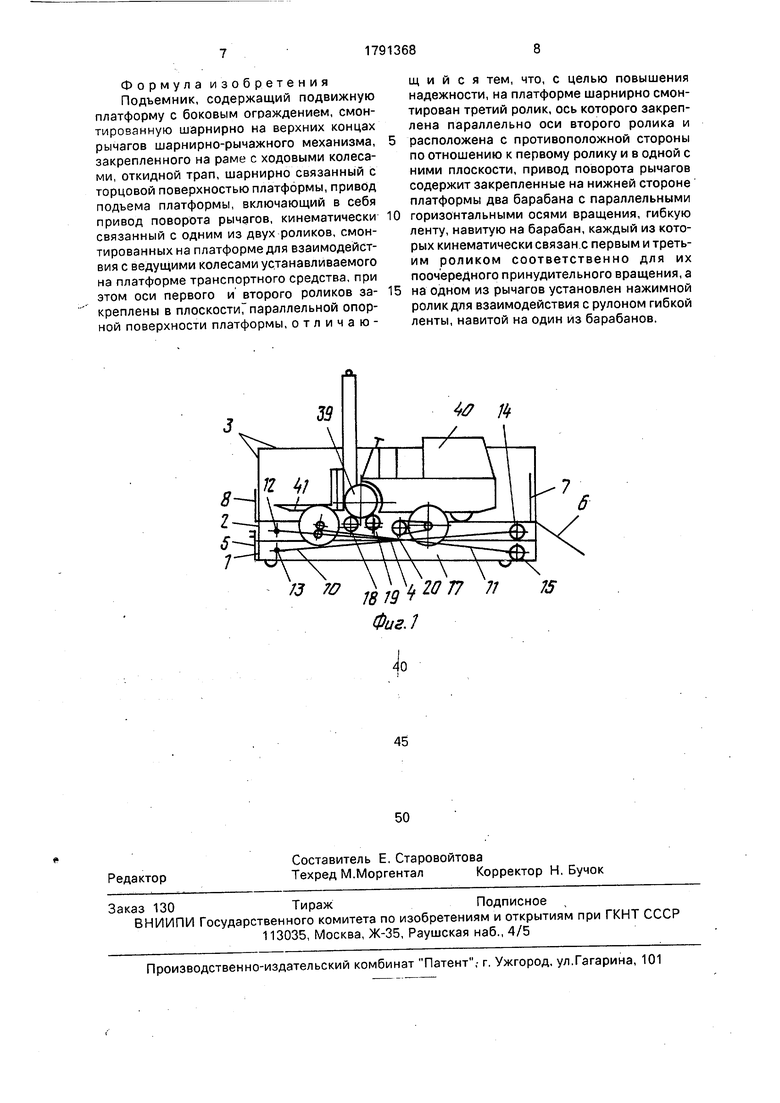
Изобретение поясняется чертежами, где: на фиг.1 - общий вид устройства; на фиг.2 - то же, в рабочем положении.
Подъемник содержит раму 1 с ходовыми колесами, подвижную платформу 2 с боковым ограждением 3, которые соединены между собой шарнирно-рычажным механизмом 4, и привод подъема платформы 2. На раме 1 установлены поворотные защелки 5 для фиксации подъемника на рельсовом пути. На торцовой поверхности платформы 2 шарнирно установлены откидной трап 6 и поворотный упор 7. С другой стороны платформы 2 закреплен шарнирно поворотный козырек 8.
Шарнирно-рычажный механизм 4 содержит пару перекрещивающихся, соединенных осью 9, рычагов 10 и 11. Верхний конец рычага 11 и нижний конец рычага 10 соединены, соответственно, осями 12 и 13 с платформой 2 и рамой 1. Верхний конец рычага 10 и нижний конец рычага 11 установлены, соответственно, катками 14 и 15 в горизонтальных направляющих 16 и 17 платформы 2 и рамы 1.
Привод подъема платформы 2 содержит ролики 18, 19, 20, смонтированные на платформе 2 при помощи осей 21, 22 и 23. На осях 21 и 23 установлены зубчатые колеса 24 и 25, которые бесконечными цепями 26 и 27 соединены, соответственно, с зубчатыми колесами 28 и 29, установленными на осях 30 и 31 платформы 2.
Привод подъема платформы 2 включает в себя привод поворота рычагов 10 и 11, Последний содержит закрепленные на нижней стороне платформы 2 два барабана 32 и 33 с ограничительными стенками 34 и 35 и с параллельными горизонтальными осями 30 и 31 вращения, гибкую ленту 36, навитую на барабаны 32 и 33. Барабаны 32 и 33 через цепные передачи 26 и 27 кинематически связаны, соответственно, с первым 18 и третьим 20 роликами.
На рычаге 11 при помощи оси 37 установлен нажимной ролик 38 для взаимодействии с рулоном гибкой ленты 36, навитой на барабан 32 с ограничительными стен- кам1 34. Линия, соединяющая ось 30 барабана 32 и ось 37, перпендикулярна рычагу 11.
Оси 21,22 первого и второго роликов 18, 19 закреплены в плоскости, параллельной опорной поверхности платформы 2, Ось 23 третьего ролика 20 закреплена параллельно оси 12 второго ролика 19 и расположена с прот воположной стороны по отношению к перв эму ролику 18 и в одной с ними плоскости,
Гервый 18 и второй 19 ролики смонтированы для взаимодействия с ведущими колесами 39 устанавливаемого на платформе 2 тра нспортного средства 40, например, погрузчика с вилочным захватом 41.
h а платформе 2 установлен тормоз ро- ликог 18, 19, 20, например, заклинивающего дзйствия с ручным приводом (на чертежах не показано).
Устройство работает следующим образом.
Годъемник перемещается вдоль грузового фронта погрузчиком или крановым оборудованием и устанавливается рамой 1 с хо;овыми колесами непосредственно у дверь ого проема крытого вагона (на чертежах i-e показано). Поворотные защелки 5, например, скобообразного вида, опускаются на ближайший рельс и фиксируются.
В исходном состоянии (фиг.1) подъемник находится в сложенном состоянии, поворотный козырек 8 установлен вертикальна. Ролики 18, 19, 20 находятся в заторможенном состоянии, поворотный упор 7 повернут и открывает доступ для въезда погрузчика 40 на платформу 2, откидной трап 6 установлен вертикально.
Водитель погрузчика 40 опускает откидной трап 6, создавая наклонный въезд. По- rpys4t к 40 въезжает по откидному трапу 6 на плг тформу 2 с боковым ограждением 3 и устанавливается ведущими колесами 39 на ролики 18.и 19. Водитель погрузчика 40 растормаживает ролики 18, 19, 20, включает механизм перемещения погрузчика вперед (на чертежах не показано), ведущие колеса 39 начинают вращаться, воздействуют на ролики 18 и 19, вращают их и оси 21, 22 и. посредством зубчатых колес 28 и 24 и бес- конечйой цепи 26 вращают ось 30 и барабан 32. барабан 32 вращается и наматывает на себя металлическую ленту 36, которая сматывается с барабана 33, установленного на оси 3J. Диаметр намотки металлической ленты 36 на барабан 32 увеличивается. Металлическая лента 36 воздействует на нажимной ролик 38, установленный на оси 37 рычага 11 и входящий между ограничительными стенками 34 барабана 32. Рычаг
11 шарнирно-рычажного механизма 4 поворачивается вокруг оси 12 относительно платформы 2. Рычаги 10 и 11 поворачиваются в осях 12, 13, 9 при этом их концы катками 14 и 15 в горизонтальных направ0 ляющих 16 и 17 перемещаются влево, верхние концы рычагов 10 и 11 поднимаются и последовательно параллельно поднимают вверх платформу 2 до уровня пола вагона (фиг.2).
5 Водитель погрузчика 40 затормаживает ролики 18, 19, 20, затем погрузчик 40 перемещается к дверному проему, воздействует вилочным захватом 41 на поворотный козырек 8 поворачивает его до упора в пол ваго0 на (на чертежах не показано).
После окончания погрузки (разгрузки) вагона погрузчик 40 въезжает задним ходом на платформу 2 и устанавливается ведущими колесами 39 на ролики 19 и 20 (на черте5 жах не показано). Водитель погрузчика 40 растормаживает ролики 18, 19,20, включает механизм перемещения погрузчика вперед. Ведущие колеса 39 начинают вращаться, воздействуют на роликиJ19 и 20, вращают их
0 и ось 23 и посредством зубчатых колес 25 и 29 и бесконечной цепи 27 вращают ось 31 и . барабан 33. барабан 33 вращается и наматывает на себя металлическую ленту 36, которая сматывается с барабана 32 с
5 ограничительными стенками 35, установленного на оси 31. Диаметр намотки металлической ленты 36 на барабане 32 уменьшается. Рычаг 11 начинает поворачиваться вокруг оси 12 при постоянном кон0 тактировании ролика 38 с металлической лентой 36. Одновременно рычаги 10 и 11 поворачиваются в осях 12, 13, 9, концы рычагов 10 и 11 катками 14 и 15 перемещаются вправо в горизонтальных направляющих 16
5 и 17. Верхние концы рычагов 10 и 11 опускаются и опускается платформа 2 с погрузчиком 40.
Подъемник приводится в исходное положение и перемещается к другому месту
0 производства погрузочно-разгрузочных работ.
Расширение области применение подъемника достигается за счет, того, что погрузчик устанавливается ведущими колесами на
5 ролики, приводит их в движение и через кинематическую систему осуществляется подъем подъемника, т.е. происходит самоподъем погрузчика, что позволяет использовать подъемник в местах отсутствия токоподвода.
Формула изобретения Подъемник, содержащий подвижную платформу с боковым ограждением, смонтированную шарнирно на верхних концах рычагов шарнирно-рычажного механизма, закрепленного на раме с ходовыми колесами, откидной трап, шарнирно связанный с торцовой поверхностью платформы, привод подъема платформы, включающий в себя привод поворота рычагов, кинематически связанный с одним из двух роликов, смонтированных на платформе для взаимодействия с ведущими колесами устанавливаемого на платформе транспортного средства, при этом оси первого и второго роликов закреплены в плоскостиГпараллельной опорной поверхности платформы, отличаю0
щ и и с я тем, что, с целью повышения надежности, на платформе шарнирно смонтирован третий ролик, ось которого закреплена параллельно оси второго ролика и расположена с противоположной стороны по отношению к первому ролику и в одной с ними плоскости, привод поворота рычагов содержит закрепленные на нижней стороне платформы два барабана с параллельными горизонтальными осями вращения, гибкую ленту, навитую на барабан, каждый из которых кинематически связан с первым и треть- им роликом соответственно для их поочередного принудительного вращения, а на одном из рычагов установлен нажимной ролик для взаимодействия с рулоном гибкой ленты,навитой на один из барабанов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1990 |
|
SU1801941A1 |
| МАНЕВРОВОЕ УСТРОЙСТВО ДЛЯ ВАГОНОВ | 2009 |
|
RU2405697C1 |
| КОЛЕСНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГАЧ | 1993 |
|
RU2096234C1 |
| Подъемная платформа | 1990 |
|
SU1730023A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ЛЕГКОВЫХ АВТОМОБИЛЕЙ | 1999 |
|
RU2149777C1 |
| Автомат для укладки рулонов на плоский поддон | 1979 |
|
SU781164A1 |
| Посадочная машина | 1989 |
|
SU1724057A1 |
| Механический погрузчик | 1974 |
|
SU606795A1 |
.Е.Казаков
V. 7/7 77 71
1819
if 10 77 71 75
Фиг.
Jo
| СПОСОБ ВЫРАБОТКИ КОНСЕРВОВ "МЯСО ЖАРЕНОЕ" | 2008 |
|
RU2358501C1 |
| Е | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
