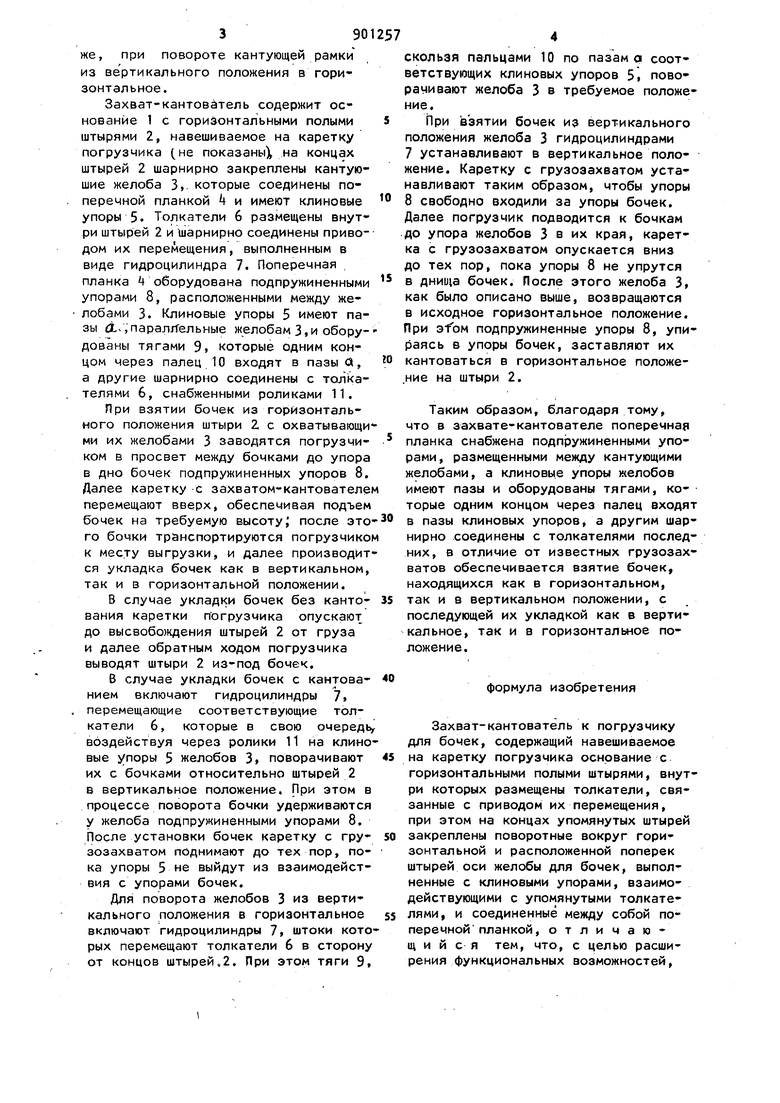
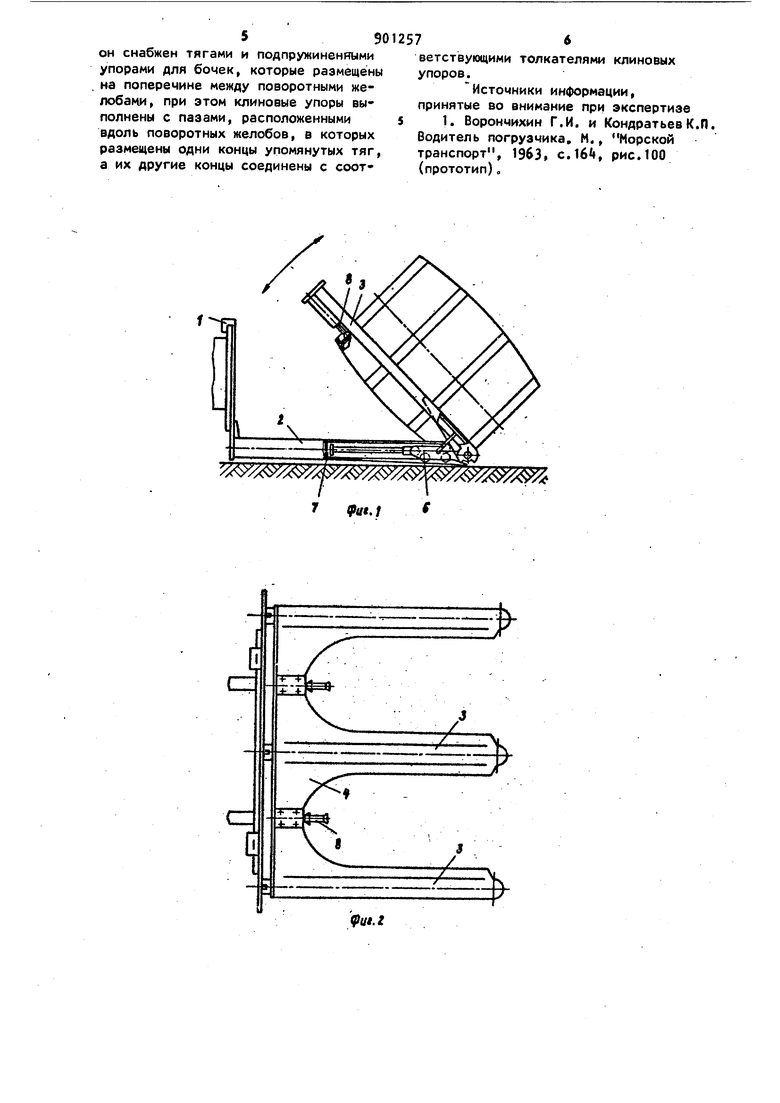
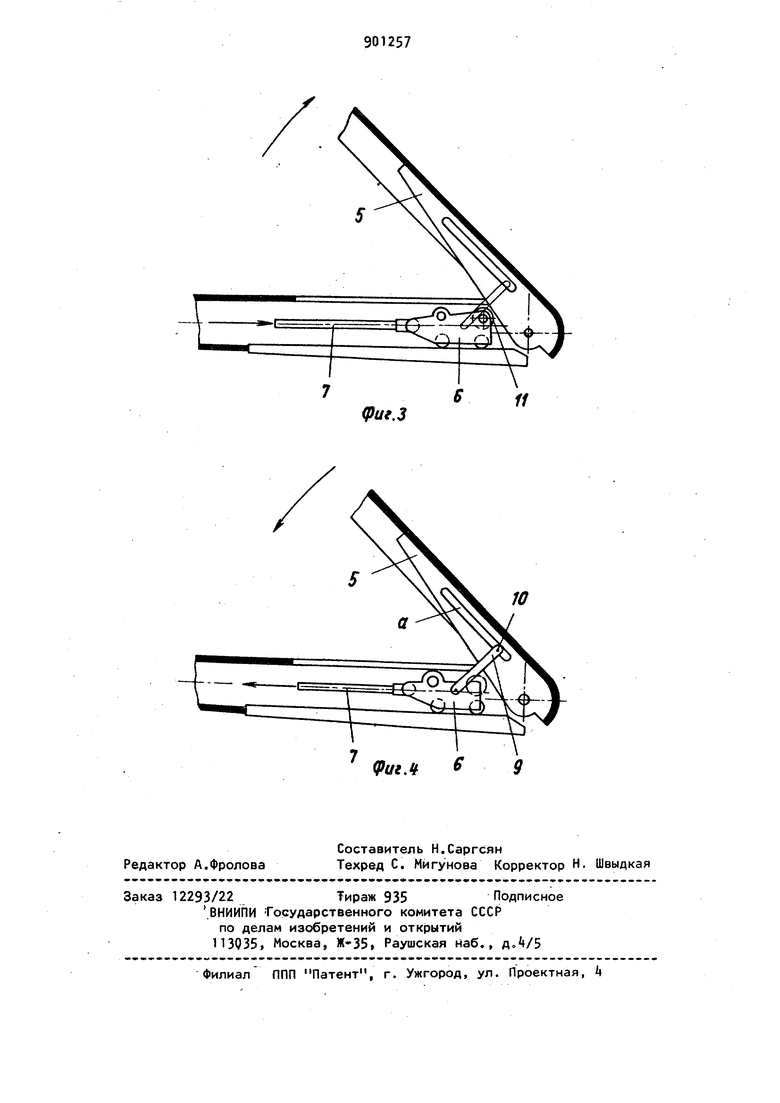
Изобретение относится к подъемнотранспортному оборудованию, исполь-. зуемому преимущественно на погрузчиках общего назначения при погрузоразгрузочных работах с бочковыми грузами на различных видах транспорта, в складах и производственных помещениях. Известен захват-кантователь к погрузчику для бочек, содержащий навешиваемое на каретку погрузчика основание с горизонтальными полыми штырями, внутри которых размещены толкатели, связанные с приводом их перемещения, при этом на концах упомянутых, штырей зак|5еплены поворотные вокруг горизонтальной, расположенной поперек штырей оси желобы для бочек, выполнен ные с клиновыми упорами, взаимодействующимим с упомянутыми толкателями и соединенные между собой поперечной планкой 1 . Недостатком этого захвата является недостаточно широкий диапазон применения, так как этот захват-кантователь не обеспечивает перегрузку бочек из вертикального положения, что часто требуется в практике перегрузочных работ. Цель изобретения - расширение функциональных возможностей. : Поставленная цель достигается тем, что захват-кантователь снабжен тягами и подпружйгненными упорами для бочек, которые размещены на поперечине между поворотными желобами, при этом клиновые упоры выполнены с пазами, расположенными вдоль поворотных желобов, в которых, размещены одни концы упомянутых тяг, а их другие концы соединены с соответствующими толкателями клиновых упоров. На фиг.1 показан захват-кантователь вид сбоку, на фиго2 - то же, вид сверху; на фиг.З узел механизма кантования при повороте кантующей рамки из горизонтального положения в вертикальное; на фиг. 4 - то
3901
же, при повороте кантующей рамки из вертикального положения в горизонтальное.
Захват-кантователь содержит основание 1 с горизонтальными полыми штырями 2, навешиваемое на каретку погрузчика (не показаны на концах штырей 2 шарнирно закреплены кантуюшие желоба 3,. которые соединены поперечной планкой k и имеют клиновые упоры 5. Толкатели 6 размещены внутри штырей 2 и шарнирно соединены приво- дом их перемещения, выполненным в виде гидроцилиндра 7. Поперечная , планка 4 оборудована подпружиненными упорами 8, расположенными между желобами 3. Клиновые упоры 5 имеют пазы dL,параллельные желобам 3,и обору-дованы тягами 9, которые одним концом через палец 10 входят в пазы Л, а другие шарнирно соединены с толкателями 6, снабженными роликами 11.
При взятии бочек из горизонтального положения штыри 2 с охватывающими их желобами 3 заводятся погрузчиком в просвет между бочками до упора в дно бочек подпружиненных упоров 8. Далее каретку с захватом-кантователем перемещают вверх, обеспечивая подъем бочек на требуемую высоту; после этого бочки транспортируются погрузчиком к месту выгрузки, и далее производится укладка бочек как в вертикальном, так и в горизонтальной положении.
В случае укладки бочек без кантования каретки погрузчика опускают до высвобождения штырей 2 от груза и далее обратным ходом погрузчика выводят штыри 2 из-под бочек.
В случае укладки бочек с кантованием включают гидроцилиндры 7. перемещающие соответствующие толкатели 6, которые в свою очередьу воздействуя через ролики 11 на клиновые упоры 5 желобов 3 поворачивают их с бочками относительно штырей 2 в вертикальное положение. При этом в процессе поворота бочки удерживаются у желоба подпружиненными упорами 8. После установки бочек каретку с грузозахватом поднимают до тех пор, пока упоры 5 не выйдут из взаимодействия с упорами бочек.
Для поворота желобов 3 из вертикального положения в горизонтальное включают гидроцилиндры 7, штоки которых перемещают толкатели 6 в сторону от концов штырей.2. При этом тяги 9,
СКОЛЬЗЯ пальцами 10 по пазам а соответствующих клиновых упоров 5, поворачивают желоба 3 в требуемое положение.
При 1взятии бочек из вертикального положения желоба 3 гидроцилиндрами
7устанавливают в вертикальное положение. Каретку с грузозахватом устанавливают таким образом, чтобы упоры
8свободно входили за упоры бочек. Далее погрузчик подводится к бочкам до упора желобов 3 в их края, каретка с грузозахватом опускается вниз до тех пор, пока упоры 8 не упрутся в днища бочек. После этого желоба 3, как было описано выше, возвращаются в исходное горизонтальное положение. При afoM подпружиненные упоры 8, упираясь в упоры бочек, заставляют их кантоваться в горизонтальное положе.ние на штыри 2.
Таким образом, благодаря тому, что в захвате-кантователе поперечная планка снабжена подп1эужиненными упорами , размещенными между кантующими желобами, а клиновые упоры желобов имеют пазы и оборудованы тягами, которые одним концом через палец входят в пазы клиновых упоров, а другим шарнирно соединены с толкателями последних, в отличие от известных грузозахватов обеспечивается взятие бочек, находящихся как в горизонтальном, так и в вертикальном положении, с последующей их укладкой как в вертикальное, так и в горизонтальное положение.
формула изобретения
Захват-кантователь к погрузчику для бочек, содержащий навешиваемое на каретку погрузчика основание с горизонтальными полыми штырями, внутри которых размещены толкатели, связанные с приводом их перемещения, при этом на концах упомянутых штырей закреплены поворотные вокруг горизонтальной и расположенной поперек штырей оси желобы для бочек, выполненные с клиновыми упорами, взаимодействующими с упомянутыми толкателями, и соединенные между собой поперечной планкой, отличающийся тем, что, с целью расширения функциональных возможностей.
он снабжен тягами и подпружиненными упорами для бочек, которые размещены на поперечине между поворотными желобами, при этом клиновые упоры вы полнены с пазами, расположенными вдоль поворотных желобов, в которых размещены одни концы упомянутых тяг, а их другие концы соединены с соот
ветствующими толкателями клиновых упоров.
Источники информации, принятые во внимание при экспертизе
1. Ворончихин Г.И. и Кондратьев К.П, Водитель погрузчика, М., Морской транспорт, 1963| 0.16, рис.100 (прототип)о
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 2012 |
|
RU2486128C1 |
| Захват-кантователь для бочек к погрузчику | 1986 |
|
SU1428688A1 |
| Захват-кантователь к погрузчику для грузов цилиндрической формы | 1982 |
|
SU1126535A1 |
| Захват-кантователь для бочек к электропогрузчику | 1984 |
|
SU1221207A2 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Захват для деревянных бочек к погрузчику | 1988 |
|
SU1548155A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| ГРУЗОЗАХВАТ К ПОГРУЗЧИКУ | 1996 |
|
RU2120401C1 |
У/У/. I У ./ f
V
/
