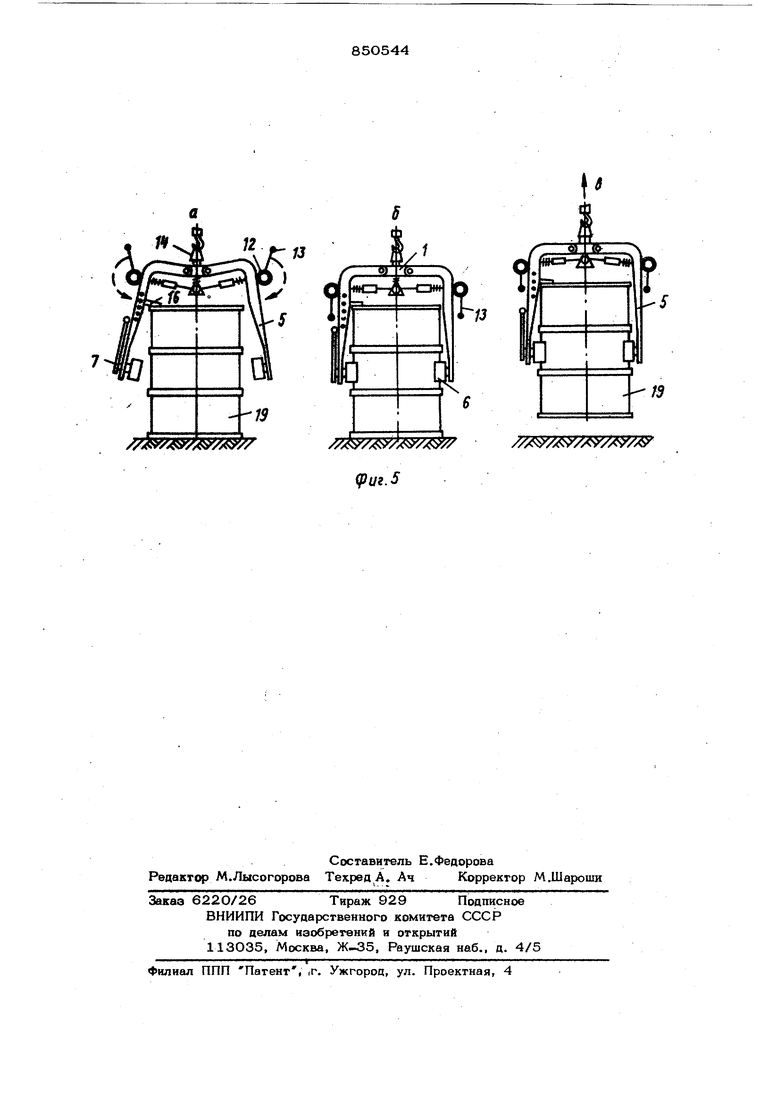
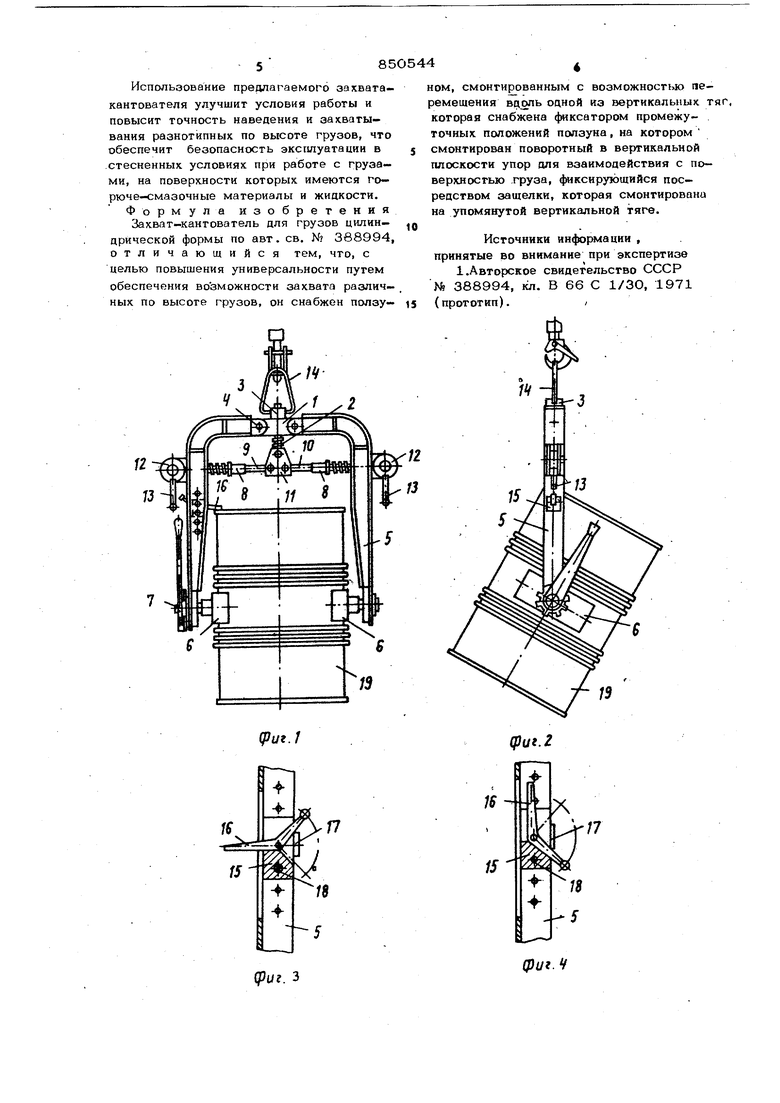
Изобретение отнсюится к груаоподъемиым механизмам, в частности к закватам - кантователям для грузов цилинорическойформы, навешиваемым на крюк кран По основному авт. св. № 388994, известен захват - кантователь, содержащий траверсу с подвеской, шарнирно закрепленные на ней жесткие вертикальные тяги с захватными органами на свободных концах, и кантующий механизм на одном из ник, причем тяги шарнирно связаны между собой коромыслом, , соединенным с подпружиненной подвеской и имеющим эксцентрик l j. Недостатком известного захвата- кантователя я&ляется то, что его конструкция не обеспечивает удобство боты с грузами (бочкотарой так как каждый раз приходится на глаз определять пространственное расположение относительно бочки, мысленно и визуально представляя себе движенне вертикальных тяг и захватных отганов,при последующем предварительном зажиме, распологать захват таким образом, чтобы затем захватные органы точно расположились на внешней поверхности груза. Такие вынужденные сложные условия работы с аахватом-i кантователем резко снижают производительность труда, обязывают рабочего находится в непосредственной близости от груза , вручную контролировать точность прилегания одного захватного органа к грузу, т. е. практически прислонять один захватный орган к бочке, выбирая место между ее ребрами жесткости и давая при этом сигналы машинисту крана на подъем или опускание за вата-«антователя. Это увеличивает также опасность, так как бочки с маслопродуктами всегда грязные и при ручном прикладывании захваты могут соскользнуть. Конструкция известного захвата-кантователя также не обеспечивает не олько высокую, но и относительною точность, наведения его на груз, которая в этом случае целиком зависит от индивицуал1 ных особенностей, квалификации и практических навыков рабочего и условий et-o заботы, например, при работах с недосгагошым освещением, когда визуально затруднительно проверить расположение захватных органов на грузе. 11ель изобретения-повышение универсальности путем обеспечения возможности захвата различных по высоте грузов. Поставленная цель достигается тем, что устройство снабжено ползуном, смонтированным с возможностью перемещения вдоль одной из вертикальных тяг,- которая снабжена фиксатором промежуточны положений ползуна, на котором смонтирован поворотный в вертикальной плоскости упор Для взаимодействия с поверхностью груза, фиксирующийся посредством защелки, которая смонтирована на упомянутой вертикальной тяге. На фиг. 1 показан захват - кантователь общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - устройство ограничителя высоты, рабочее положение; на фиг. 4- то же, при откинутом упоре; на 4я1г. 5- схема работы захвата - кайтователя (а,б,в - рабочие положения). Захват - кантователь содержит траверсу 1 с подпружиненной пружиной 2, по веской 3 и с подвещенными к ней с помо щью осей 4 жесткими вертикаль§1ыми- тягами 5, несущими на свободных концах захватные органы 6. Захватные органы установлены с возможностью поворота и один из них имеет кантующий механиз 7. Для повышения удобства работы возможно размещение двух кантующих механизмов на каждой тяге, выполненных в виде рычага с осью, соединенной с захватным органом 6. Вертикальные тяги 5 связаны между собой шарнирно прикрепленным к ним коромыслом регулируемой с помощью гаек 8 с правой и левой резьбами длины. Коромысло выполнено в виде двух рычагов 9 и 10, шарнирно соединенных межд собой и с подвеской 3 узлом 11. Свободные концы рычагов 9 и 1О имеют отверстие, внутри которого размещен эксцентрик 12, смонтированный на вертикальной тяге с возможностью поворота рукояткой 13. Подвеска 3 снабжена кольцом 14 для навешивания захвата-«антователя на крюк, грузоподъемного механизма. . На вертикальной тяге 5 установлен огр ничитель опускания, выполненный в виде. ползуна 15с поворотным упором 1Ь к защелкой 17. Ползун имеет фигурный &ырез, может продольно-перемещаться по вйртикальной тяге 5 и стопориться. на ней в промежуточных позициях фиксатором 18. Упор 16 вьшолнен в виде двух-. плечего рычага, свободно посаженного на ось и заканчивающегося ручкой. Защелка 17 ; запирает упор 16 в крайних положениях: в рабочем и в откинутом. При перемещении ползуна 15 упор 16 скользит в прорези вертикальной тяги 5. В зависимости от производственных условий работы возможно размещение ограничителей опускания на каждой вертикальной тяге 5. Перед началом работы производят настройку, захвата-кантователя в зависимости от диаметра захватываемого груза гайками 8 и его высоты (перемещением ползуна 15 и его стопорения на вертикальной тяге фиксатором 18, упор 16 при этом опущен и занимает горизонтальное положение). При повороте рукоятки 13 в верхнее положение эксцентрик 12, воздействуя на коромысло, поворачивает вертикальные тяги 5 вокруг осей 4 наружу, а пружина 2, воздействуя на подвеску 3, переметцает ее до тех пор, пока кольцо 14 не упрется в траверсу 1. Захват - кантователь кольцом 14 подвешивается на крюк грузоподъемного механизма и наводится на груз 19 (фиг.5а). При опускании захвата - кантователя на груз он опирается упором 16 ограничителя опускания на верхнюю поверхность груза и тем самым автоматически занимает наилучшее пространственное положе- ние для надежного. захватывания груза. Рабочий опускает рукоятку 13 вниз, поворачивая эксцентрик 12 внутрь до упора захватных органов 6 в груз (фиг. 5,6)), осуществляя тем самым предварительное зажатие груза. При включении подъемной лебедки грузоподъемного механизма тяговое усилие передается через крюк и кольцо 14 на подвеску 3, а от нее, преодолевая действие пружины 2 и сжимая ее, через шарнирН1эе соединение с осью 11 и рычаги 9 и 1О - на вертикальные тяги 5, поворачивая их вокруг осей 4 и производя окончательный зажим груза с последующим его подъемом ( фиг. 5,в). Для кантования поднятого груза открывают защелку 17, откидывают упор 16 и вновь запирают его защелкой 17 в другом крайнем .положении, При взятии горизонтально лежащего груза операции производят в аналогичной последовательности, заранее установив зах.ватные органы в нужно ; попожение. 5 85 Использование предлагаемого захватакантователя улучшит условия работы и повысит точность наведения и захватывания разнотипных по высоте грузов, что обеспечит безопасность эксгшуатации в .стесненных условиях при работе с грузами, на поверхности которых имеются горюче-смазочные материалы и жидкости. Формула изобретения Захват-кантователь для грузов цилиндрической формы по авт. св. № 368994, отличающийся тем, что, с целью повышения универсальности путем обеспечения возможности захвата различных по высоте грузов, он снабжен ползу(риг.1
(put. 2 ом, смонтированным с возможностью перемещения Bcionb одной из вертикальных тяг. которая снабжена фиксатором промежуточных положений ползуна, на котором смонтирован поворотный в вертикальной плоскости упор для взаимодействия с поверхностью груза, фиксирующийся посредством защелки, которая смонтирована на упомянутой вертикальной тяге. Источники информации , принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 388994, кл. В 66 С 1/ЗО, 1971 (прототип)./
(риг. 3
(риг. If sy fsy eayxsv/ риг.5 

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1973 |
|
SU388994A1 |
| Захват-кантователь | 1991 |
|
SU1794850A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Захват-кантователь для грузов | 1976 |
|
SU734123A1 |
| Захват-кантователь | 1985 |
|
SU1386546A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ЦИЛИНДРИЧЕСКИХ И БОЧКООБРАЗНЫХ ГРУЗОВ | 1973 |
|
SU367038A1 |
| Захват-кантователь | 1989 |
|
SU1794852A1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Захват-кантователь | 1980 |
|
SU922032A1 |
| Захват-кантователь | 1977 |
|
SU839970A1 |