I
Изобретение относится к контрольно-измериТельной технике и предназначено для проверки точности навигационных приборов, а именно для измерения погрешности индукционных магнитных компасов.
Известны устройства для проверки индукционных компасов, получившие широкое применение на авиапредприятиях, содержащие поворотный стол с закрепленным на нем датчиком компаса и неподвижный лимб, относительно которого отсчитываются угловые рассогласования С1 .
Эти устройства просты по своему конструктивному исполнению, однако не способны компенсировать возмущения магнитного поля, влияющие на результаты проверки.
Известны также устройства, в которых компенсация возмущения магнитного поля во время проверки осуществляется с помощью элементов нейтрализации магнитного поля Земли.
Наиболее близким к предлагаемому является устройство для проверки исправности и точности работы индукционных компасов, которое, кроме задатчика угловых рассогласований, содержит еще электрообмотки, помещенные вблизи или внутри датчика, создающие искусственное магнитное поле, угловое положение вектора напряжённости которого измеряется с по10мощью специального устройства, вырабатывающего показания в виде поворота стрелки относительно лимба задатчика угловых рассогласований с помощью следящей системы L21.
ts
Известное устройство обеспечивает компенсацию возмущения магнитного поля путем его нейтрализации и созданием искусственного голя,.однако
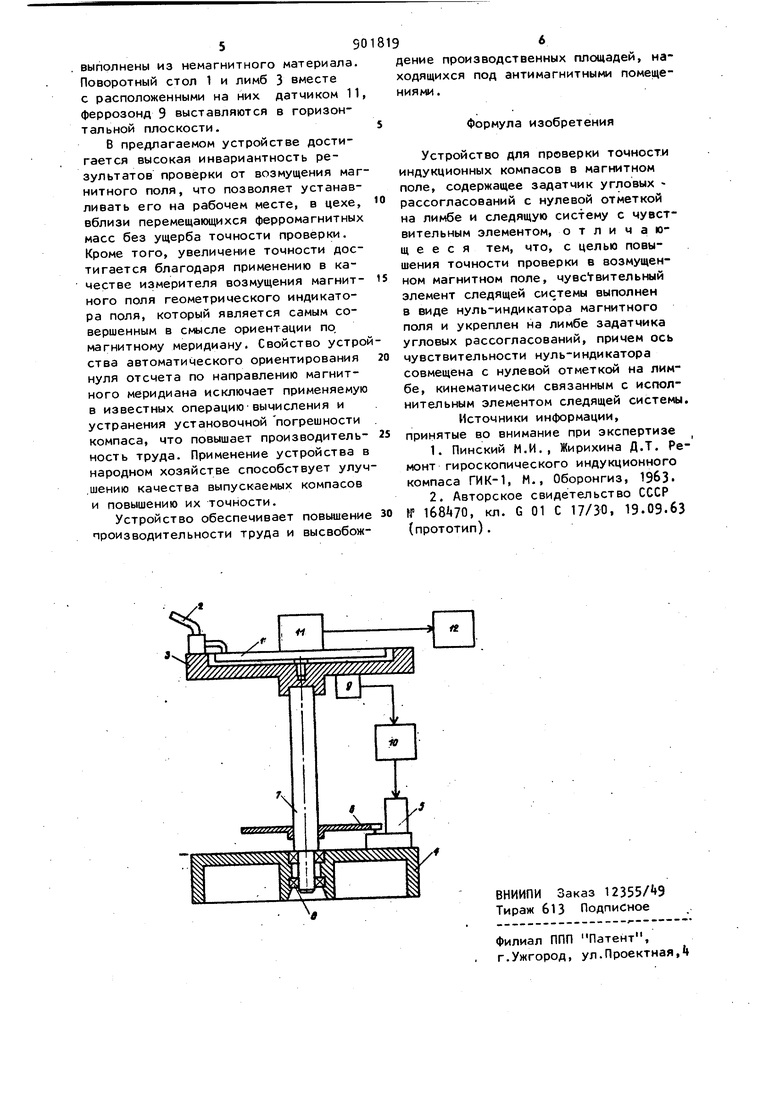
20 точность его измерения недостаточна из-за чрезмерного усложнения элементов нейтрализации магнитного поля. Цель изобретения - повышение точ ности проверки в возмущенном магнит ном поле. Поставленная цель достигается те что в устройстве, содержащем задатчик угловых рассогласований с нулев отметкой на лимбе и следящую систему с чувствительным элементом, чувствительный элемент следящей системы выполнен в виде нуль-индикатора магнитного поля и укреплен на лимбе задатчика угловых рассогласований, причем ось чувствительности нульиндикатора совмещена с нулевой отметкой на лимбе, кинематически связанным с исполнительным элементом следящей системы. Размещение нуль-индикатора магнитного поля на лимбе звдатчика угловых рассогласований позволяет авто матически компенсировать погрешност от возмущения поля, что дает возмож ность вести проверку, например, в цехе завода, а совмещение оси чувст вительности нуль-индикатора с осью, проходящей через центр лимба и его нулевую отметку, исключает установочную погрешность датчика. На чертеже показана электрокинематическая схема устройства. Устройство состоит из поворотного стола 1, фиксатора 2, закрепленного лимбе с нулевой отметкой 3. К основа нию k прикреплен двигатель с редуктора 5) кинематически связанный с колесом 6, закрепленным на штанге 7г Нижний конец штанги 7 закреплен в осевой опоре 8, а верхний прикреплен к центру лимба 3. На лимбе 3 установлен нуль-индикатор магнитного поля, например феррозонд 9, его ось чувствительности совмещена с осью, проходящей через нулевую отметку и центр лимба 3 Сигнальные обмотки феррозонда 9 соединены со входом избирательного усилителя 10, запитываю щего управляющие обмотки двигателя с редуктором 5. На поворотном столе на расстоянии 30-100 мм закреплен индукционный датчик магнитного курса 11, проверяемого компаса 12. Датчик 11 электрически связан с компасом 12. Устройство работает следующим образом. Запитывают необходимым током компас 12, феррозонд 9, усилитель 10 и двигатель с редуктором 5- Под воздействием горизонтальной составляющей магнитного поля в сигнальных обмотках феррозонда 9 наводится выходная ЭДС. Это напряжение усиливается в избирательном усилителе 10, настроенном на вторую гармонику сигнала. Усиленный сигнал запитывает обмотку управления электродвигателя с редуктором 5, который посредством колеса 6 поворачивает штангу 7 в осевой опоре 8. Вместе со штангой 7 поворачивается лимб 3 с феррозондом 9 до такого положения, при котором проекция горизонтальной составляющей магнитного поля на ось чувствительности феррозонда обращается в нуль. Таким образом, ось чувствительности феррозонда 9 вместе с нулевой отметкой, лимба 3 opиeнfируются по магнитному меридиану. С помощью поворотного стола 1 задают угловое рассогласование датчику 11 относительно нулевой отметки лимба 3 и фиксируют его фиксатором 2 к лимбу 3. Если погрешность компаса 12 отсутствует, то указатель компаса покажет величину угла рассогласования. При возмущении магнитного поля, выражающемся в изменении направления магнитного меридиана на величину угла А, в сигнальных обмотках феррозондах 9 снова наводится ЭДС, наличие которой приводит (указанным выше способом) к слежению его оси чувствительности, а следовательно, и нулевой отметки на лимбе 3 за направлением магнитного меридиана. Будучи соединенным с лимбом 3 фиксатором 2, индукционный датчик также поворачивается на величину угла А, вызванным возмущением поля. Таким образом, отсчет углового рассогласования компаса 12 в любой момент времени проверки происходит относительно истинного магнитного меридиада, что исключает влияние случайного отклонения направления магнитного меридиана на результаты проверки. Угловая погрешность компаса 12 определяется как разность между углом магнитного курса, задаваемого на лимбе 3, и углом курса, отработанного компасом 12. Феррозонд 9 и индукционный датчик 11 расположены на расстоянии 30100 мм лруг от друга, что обеспечивает воздействие примерно одной и той же величины напряженности горизонтальной составляющей магнитного поля. Оптимальная высота штанги 7 равна 800-1000 мм.Детали устройства
выполнены из немагнитного материала. Поворотный стол 1 и лимб 3 вместе с расположенными на них датчиком 11 феррозонд 9 выставляются в горизонтальной плоскости.
В предлагаемом устройстве достигается высокая инвариантность результатов проверки от возмущения магнитного поля, что позволяет устанавливать его на рабочем месте, в цехе, вблизи перемещающихся ферромагнитных масс без ущерба точности проверки. Кроме того, увеличение точности достигается благодаря применению в качестве измерителя возмущения магнитного поля геометрического индикатора поля, который является самым совершенным в смысле ориентации по, магнитному меридиану. Свойство устроства автоматического ориентирования нуля отсчета по направлению магнитного меридиана исключает применяемую в известных операцию вычисления и устранения установочной погрешности компаса, что повышает производительность труда. Применение устройства в народном хозяйстве способствует улуч.шению качества выпускаемых компасов и повышению их точности.
Устройство обеспечивает повышение производительности труда и высвобождение производственных площадей, находящихся под антимагнитными помещениями.
Формула изобретения
Устройство для проверки точности индукционных компасов в магнитном поле, содержащее задатмик угловых рассогласований с нулевой отметкой на лимбе и следящую систему с чувствительным элементом, о т л и чающееся тем, что, с целью повышения точности проверки в возмущенном магнитном поле, чувствительный элемент следящей системы выполнен в виде нуль-индикатора магнитного поля и укреплен на лимбе задатчика угловых рассогласований, причем ось чувствительности нуль-индикатора совмещена с нулевой отметкой на лимбе, кинематически связанным с исполнительным элементом следящей системы
Источники информации, принятые во внимание при экспертизе
1.Пинский М.И., Жирихина Д.Т. Ремонт гироскопического индукционного компаса ГИК-1, М., Оборонгиз, 1963.
2.Авторское свидетельство СССР
№ , кл. G 01 С 17/30, 19.09.63 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Устройство для измерения погрешностей иНдуКциОННыХ КОМпАСОВ | 1979 |
|
SU823863A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОЧИСТНОГО ПОРШНЯ В ТРУБОПРОВОДЕ | 1992 |
|
RU2123897C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОЧИСТНОГО ПОРШНЯ В ТРУБОПРОВОДЕ | 1995 |
|
RU2123896C1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| ИНДУКЦИОННЫЙ КОМПАС | 1973 |
|
SU395716A1 |
| СПОСОБ ПРОВЕРКИ ИСПРАВНОСТИj | 1965 |
|
SU168470A1 |
| Дистанционный индукционный компас | 1978 |
|
SU717536A1 |
| Стабилизатор курса речных судов | 1972 |
|
SU449853A1 |
