.(54) ДИСТАНЦИОННЫЙ ИНДУКЦИОННЫЙ КОМПАС
. : , ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Устройство для проверки точности индукционных компасов | 1980 |
|
SU901819A1 |
| Дистанционный магнитный компас | 1978 |
|
SU777429A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Устройство для измерения искревления скважин | 1974 |
|
SU595494A1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2302615C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
Устройство относится к навигационным компасам с однофазным ин.дукционным преобразователем и может быть использовано в составе навигационного оборудования кораблей или самолетов, а также.в горнорудной промышленности: при проходке шахт и туннелей, -при бурейии нефтяных скважин и т. д. в тех случаях, когда требуется определение, магнитного курса.
Известны широко используемые в навигации трехфазные индукционные дистанционные компасы, состоящие из основного компаса, системы дистанционной передачи и указателя комйаса, который принято называть репитером 1.
Основной компас представляет собой трехфазный индукционный преобразователь, содержащий три ферро- , зондовых чувствительных элементэг расположенных в горизонтальной плоскости в виде равносто оннего треугольника. Для дистанционной передачи в устройствах такого типа ; используются сельсины.
Недостатками указанных устройств являются сложность конструкции .и трудоёмкость технологии произвоД
ства, требующего изготовления трех идентичных йндукцйЬйных чувствитель ных элементов, что практически невозможно. --
5 Другим недостатком известных трехфазных индукционных дистанционных компасов являетс я необходимость использования сельсинов,, которые кроме усложнения конструкции привод
снижению точности и измерений направления до + 0,5° при спокойном состоянии моря и до ± 1 при качке. Известен так называемый однофазный индукционный компас, прин ятый
15 за прототип, основан /ый на применении индукционного преобразователя в качестве нуль-ийдикатора. Однофазный ИНДУКЦИОННЫЙ компас состоит из индукционного феррозондового
20 преобразователя магнитного поля, питаемого генератором возбуждения, усилительно-преобразовательно схе№1 ориентации с исполнит.ельным двигателем, системы дистанционной передачи и указателя компаса 2.
Индукционный преобразователь в таком, крмпасе жестко установлен на , вращающейся горизонтальной площадке, поворачивакидейся с помощью ис30 полнительнрго двигателя системы ориTaifKK, управляемой следящей системой до тех пор, пока напряжение на выходе прёобразЬваТеля не станет равным нулю. Это положение насту пи г в тот момент,- когда ма:гнитная ось датчика окажется перпендикулярной плоскости магнитного меридиана. Сохраняй установившееся положение при помощи следящей системы, которая вместе с индукционным преобразбвателем ВХОДИТ в. состав основного компаса, и испольэуя дистайционную передачу, углы noBopOfS Чувствительного элемейТа на указателе компаса,В указанном известном устройстве система электрической дистанционной Передали может быть: построена на индукционных элементах, например, сельсинах, вращающихся трансформатоpax или на потенциометрах.
Недостатком онисанного известного компаса является его низкая тЪчйЬсть из-sa неточной дистанционной передачи угла поворота платформы с датчиком к указателям компаса.
Целью изобрёте1ния яв л ясёт с я увеличение чувствительнОстн следящей системы.
эта цель достигается тем, что дистанционный индукционный компас, содержащий индукционный преобразо:ёШ ШЁПШт1Штшш Ъйлйтгёльйопреобраз овательную cxewiy, с истаму ориентации индукционного преобразоГвателя С исполнительным двигателем иуказатель компаса снабжен не меНее, чем одним, соленоидом с осью
расположенной в одной плоскости с . ;даью йИйУЗкЦиойногЬ преЬб1Р&§Оватёля, генератором переменного тока, под, ключенным к соленоиду, и устройст- .. вом выделения и обработки сигнала опорного магнитного Поля, создаваемого соленоидом, которое соёдйне;но с усилительно-преобразовательной dxe мой системы ориентации и указателем компаса.
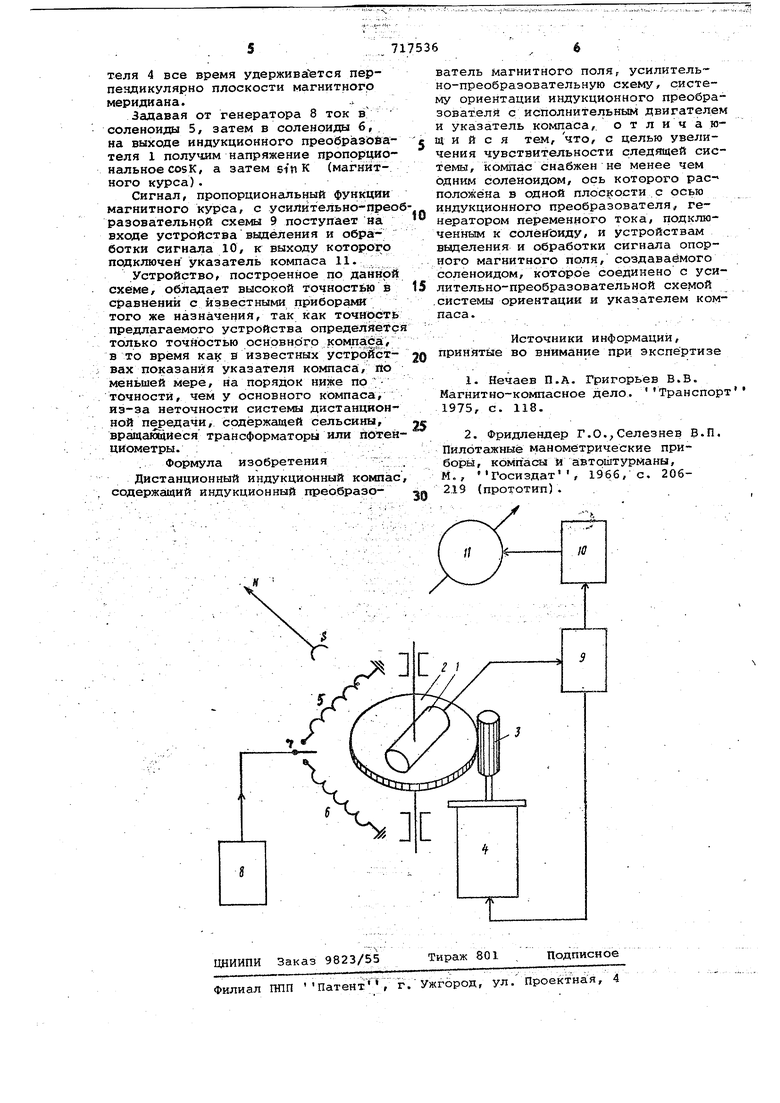
На чертеже изображена блок-схема предлагаемого компаса.
Индукционный преов разователь 1, например феррозонд, укреплен на площадке 2, которая через редуктор 3 соединена с исполнительным двигателем 4. Соленоиды 5 и 6 укреплены ортогонально дру1 к другу Hgi корпусе компаса так, что их Лежат в одной плоскости с осью индукционного датчика. Соленоиды через переключатель 7 могут подключаться к генератору тока 8. Индукционный преобразователь 1 соединен и усилительно-преобразовательной схемой системы ориентации 9, которая сЬеййнёна с исполнительным двигателем 4 и через устройство выделения и , обработки сигнала опорного магнитного поля 10 соединена с ука, зателем компаса 11. ..„ .
Для понимания работы компаса рассмотрим как осуществляется преобразование угла поворота площадки с индукционным преобразователем магнитного поля.
.Площадка 2 с индукционным преобразователем 1, имеющая степень свобды относительно вертикальной оси, под действием горизонтальной составляющей магнитного поля Земли с помсдаью испОлН11тельного двигателя 4, получающего сигнал от усилительно-преобразовательной схемы 9, автоматически удерживается в положении, когда продольная ось индукционного преобразователя перпендикулярна плоскости магнитного меридиана (та- работают все индукционные компасы с однофазным чувствительным ..элементом) .- , . .
Регистрация показаний предлагаемого компаса Основана на том, что проекция направленного магнитного поля, создаваемого соленоидами 5 и б, на продольную ось индукционног преобразователя магнитного поля 1 . за|вй6ит от их взаимного положения, т. е. у если продольная ось индукционного преобразователя магнитного поля 1 составляет угол оС с .магнитной осью соленоида 5 или б, то лТ Н cbsot, гдедТ - проекция напряженности магнитного поля соленоида на ЛрэдолЁную ось индукционного преобр/зовгателя; Н - напряжёнйость магнитцОго поля соленоида в объеме йндукЦйвиного преобразователя ри положении , магнитная ось источника параллельна продольной оси индукционного преобразователя;
В предлагаемом компасе соленоиды 5 и б, жестко связанные с корпусом прибора, установлены так, что на
магйитном курсе О продольная магнитная Ось соленоида 5 параллельна продольной оси индукционного преобразователя 1, а соленоида 6 перпендикулярна ей.
При таком расположении соленоидов проекция опорного магнитного поля соленоида 5 на продольную осе-индукционного преобразователя, в Силу сказанного выше, определяет; Си как:. .....; ,; .
ЛТу HS- ,
.а источника б как:
лФ,
H.COSK,
где К -:, магнитный кУРс.
Из приведенных соотношений видно, что магнитный курс есть функция отношения проекции опорного йагнитного поля к магнитному полю соленоида. .
Компас работает следующим образом
Индукционный преобразователь 1 с помощью усилительно-преобразовательной схемы 9 и исполнительного двига
