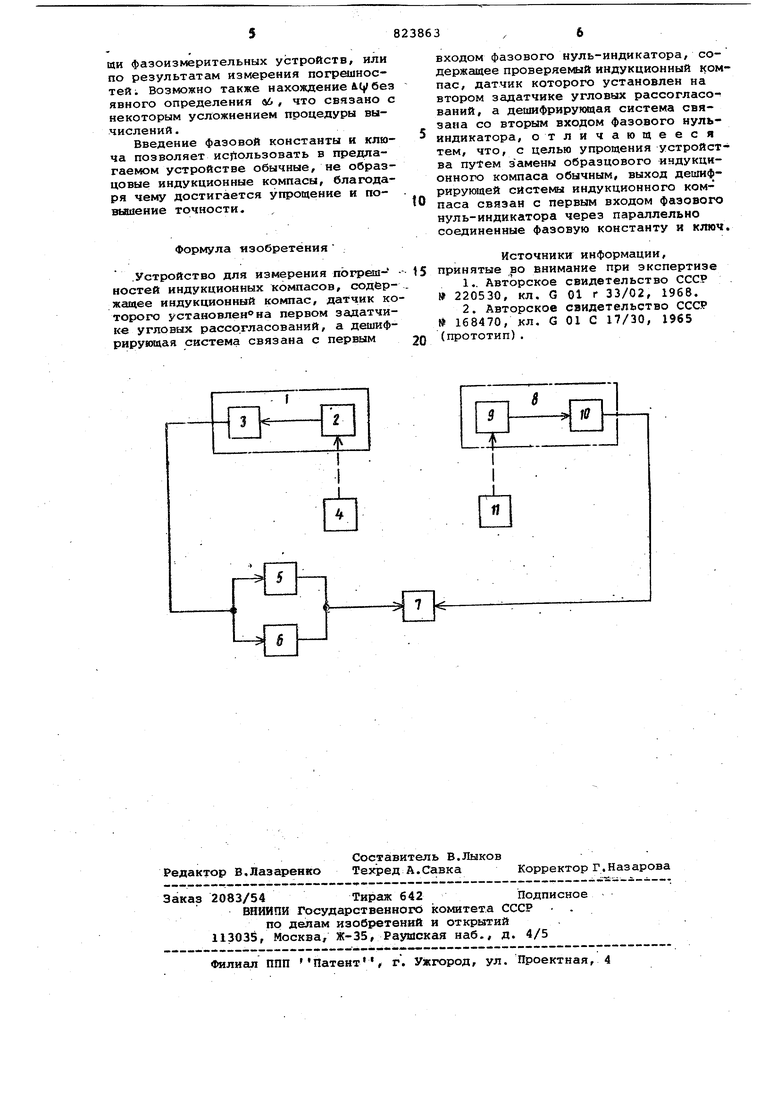
компасов, что связано с усложнением удорожанием последних и устройства в целом.. Цель изобретения - упрощение устройства путем замены образцового индукционного компаса обычным. Поставленная цель достигается тем что в устройстве для измерения погрешностей; индукционных компасов выход дешифрирующей системы индукционного компаса связан с первым входом фазового нуль-индикат.ора через -парал лельно соединенные фазовую константу и ключ. На чертеже изображена блок-схема предлагаемого устройства ь Устройство для измерения погретностей инд;укционного компаса содержи вспомогательный индукционный компас 1, состоящий из индукционного датчика 2 и дешифрирующей системы. 3, вход которой i подключен к выходу индукцио ного датчика 2. Индукционный датчик связан с задатчиком 4 угловых рассог ласований . Выход дешифрирующей систе мы 3 соединен с входом фазовой константа 5 и входом ключа 6. ВыХод фазоной константы 5 и выход ключа б подключены к одному из входов фазово го нуль-индикатора 7. Проверяемый индукционный компас 8 образован, последовательно соединенны индукционным датчиком 9 и дешифрирую щей системой 10. При измерении, погрешностей проверяемого индукционного компаса 8 его индукционный датчик 9 связывается с задатчиком 11 угловых рассогласований и располагается в непосредственной близости к индукционному датчику 2. Выход проверяемого компаса 8, т.е. выход его дешиф рирующей системы 10, подключается пр проверках к другому входу фазового нуль-индикатора 7. . Генератор возбуждения индукционны датчиков 2 и 9, а так едругие ис-, точники питания устройства на чертеж не показаны. / При описании работы устройства примем для определенности, что задан угловых рассогласований при измерени погрешностей происходит путем поворота индукционных датчиков 2 и 9 относительно направления горизонтально составляющей Н вектора н.апряженности магнитного поля, В соответствии с этим будем считать/ что залатчики уг ловых рассогласований 4 и 11 выполнены в виде обычных поворотных установок с угломерными датчиками. Фазовая константа 5 представляет собой фазосдвигающий ёдемент, создаю щий постоянный сдайг фазы выходного сигнала относительно входного. Величина этого сдвига выбирается из требуемого числа угловых рассогласовани .в которых необходимо произвести измерение погрешностей проверяекгогчэ компаса 8, Работа устройства состоит в еледующем. Индукционные датчики 2 и 9 измеряют компоненты горизонтальной составляющей Н вектора напряженности магнитного поля Земли. Дешифрирующие системы 3 и 10 преобразуют выходную информацию индукционных датчиков 2 и 9 в информацию об отклонении корпуса соответствующего датчика от направления Н в виде фазы электрического сигнала. При замкнутом ключе б поворотом задатчика 4 индукционный датчик 2 устанавливается в исходное положение, характеризуемое углом . После этого поворотом задатчика 11 индукционный датчик 9 устанавливается в такое положение, при котором показания фазового нуль-индикатора 7 .будут минимальны. Это положение характеризуется тем, что выходные сигналы дешифрирующих систем 3 и 10 равны между собой по фазе. Далее ключ 6 размыкает ся. При этом выходной сигнал дешифрирующей системы 3 получает некоторый фазовый сдвиг, определяемый параметрами фазовой константы 5. Поворотом задатчика 11 индукционный датчик 9 устанавливается в положение Ц , при котором показания фазового нуль-индикатора 7 будут втнимгшьны. Это поло«-ение отличается от первоначального положения Vg на величину угла, соответствующего фазовому сдвигу, вносимому фазовой константой 5, и погрешности проверяемого компаса Б в данном угле. Затем ключ б, зш«дкается, и вновь поворотом задатчика 4 индукционный датчик 2 устанавливается в положение, при котором показания фазового нульиндикатора будут минимальны. Далее все описанные операции повторяются, пока не будет пройден полный цикл изменения углового положения в пределах полного оборота индукционного датчика 9. Таким образом, -фиксируется ряд значений углов поворота задатчика 11, а вместе с ними и индукционного датчика ,9 ())Q ,(,), (j , ... ,. Любой из этих углов можно представить aoiгебраической сумлюй C}(,- «;+AV (1) где oi - фазовый сдвиг фазовой константы 5; utj)- погрешность гфоверяемого индукционного компаса 8 при i-TOM угловом рассогласовании. Из (1) получим iVi 414 - Ot«- (2) Из выражения (2) следует, что для нахождения погрешности, Д.(у необходимо определить неизвестную величину 00 . Эта величина может быть определена до проведения измерения погрешностей,. например, путем калибровки при помощи фазоизмерительных устройств, или по результатам измерения погрешностей ; Возможно также нахождение ( без явного определения s&, что связано с некоторым усложнением процедуры вычислений .
Введение фазовой константы и ключа позволяет использовать в предлагаемом устройстве обычные, не образцовые индукционные компасы, благодаря чему достигается упрощение и повышение точности.
Формула изобретения
.Устройство для измерения погреш- ностей индукционных компасов, содержащее индукционный компас, датчик которого установлен на первом задатчике угловых рассогласований, а дешифрирующая система связана с первым
входом фазового нуль-индикатора, содержащее проверяемый индукционный компас, датчик которого установлен на втором задатчике угловых рассогласований, а дешифрирующая система связана со вторым входом фазового нульиндикатора, отличающееся тем, что, с целью упрощения устройства путем замены образцового индукционного компаса обычным, выход дешифрирующей системы индукционного комoпаса связан с первым входом фазового нуль-индикатора через параллельно соединенные фазовую константу и ключ.
Источники информации,
s принятые во внимание при экспертизе
1.. Авторское свидетельство СССР 220530, кл. G 01 г 33/02, 1968.
2. Авторское свидетельство СССР 168470, кл. G 01 С 17/30, 1965 (прототип).
0

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для проверки точности индукционных компасов | 1980 |
|
SU901819A1 |
| Способ настройки интегрирующегопРиВОдА пЕРЕМЕННОгО TOKA | 1978 |
|
SU800972A1 |
| Способ определения цикловой подачи топлива и устройство для его осуществления | 2015 |
|
RU2665566C2 |
| СПОСОБ ПРОВЕРКИ ИСПРАВНОСТИj | 1965 |
|
SU168470A1 |
| Анализатор гармоник напряжения промышленной частоты | 1960 |
|
SU134328A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОЧВЫ | 2013 |
|
RU2535102C1 |
| ЦИФРОВАЯ СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ | 1990 |
|
RU2047890C1 |
| Имитационно-испытательный комплекс для лазерной баллистической измерительной системы | 2020 |
|
RU2766534C2 |
| Преобразователь азимута инклинометра | 1981 |
|
SU1002547A1 |
| Устройство для контроля параметров синусно-косинусного вращающегося трансформатора | 1989 |
|
SU1720128A1 |
