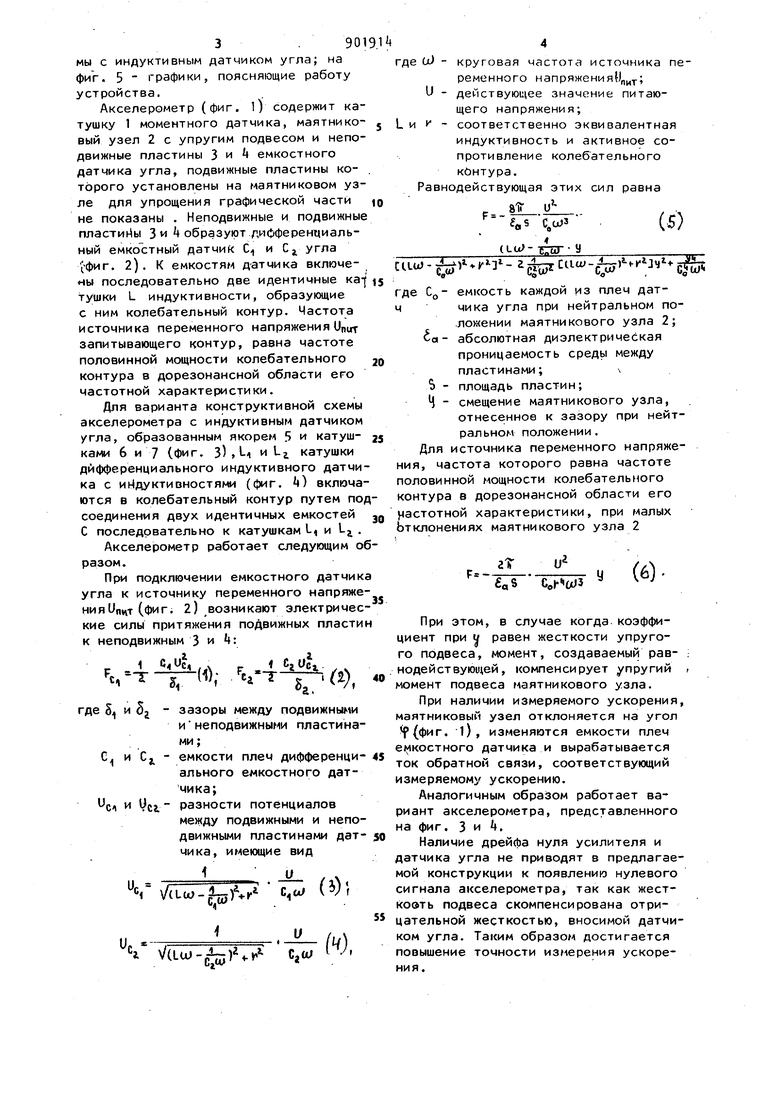
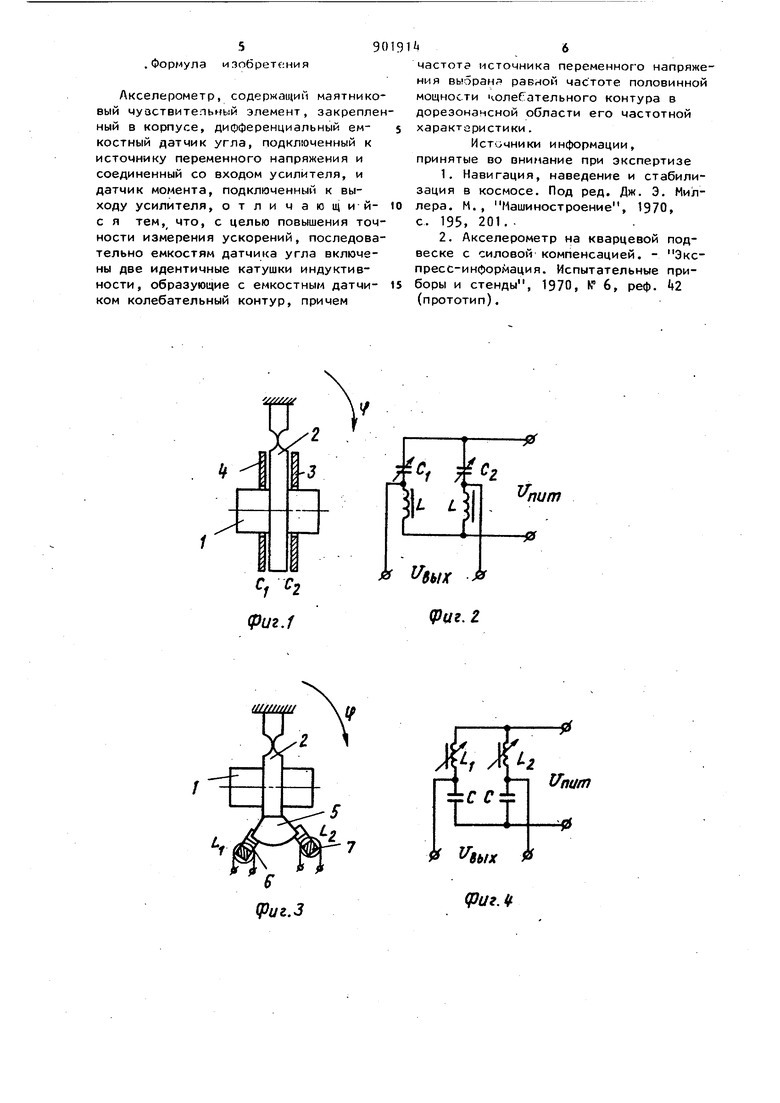
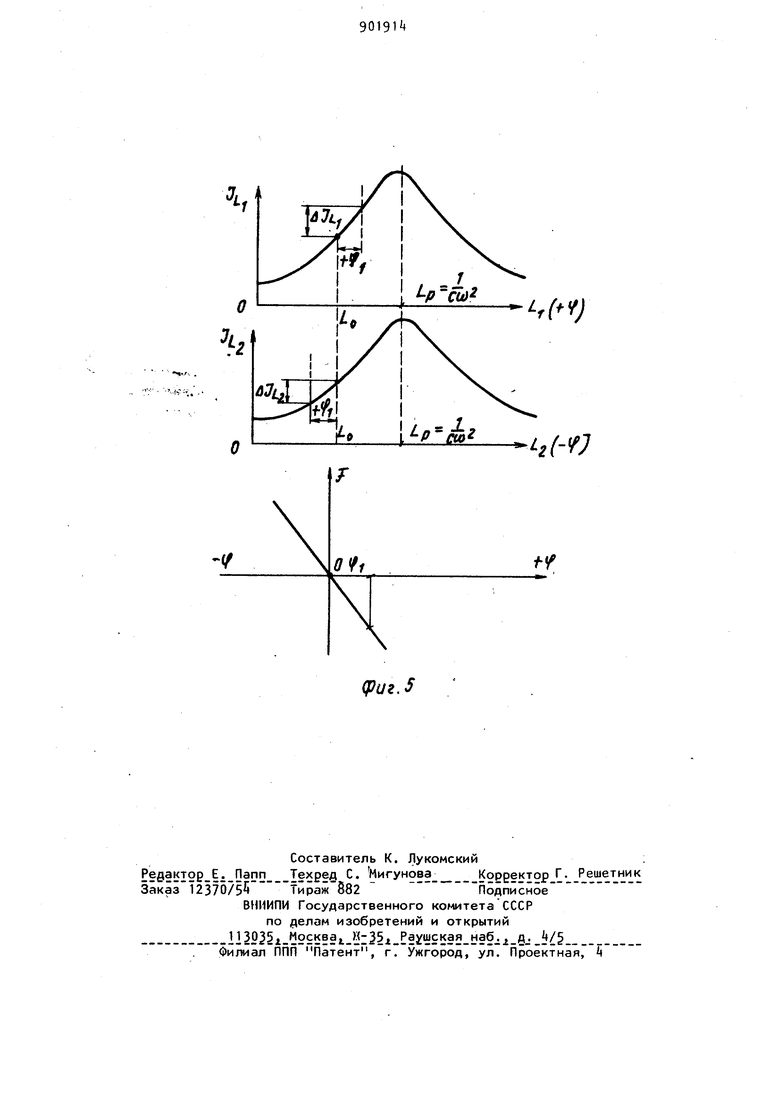
Изобретение относится к измерению параметров движения, в частности к маятниковым компенсационным акселерометрам. Известные конструкции компенсацион ных маятниковых акселерометров с камневыми опорами и магнитными подвесами для уменьшения погрешностей чувствительности путем уменьшения трения и моментов тяжения в подвесе требуют обеспечения полного гидростатического взвешивания узла чувствительного элемента и надежного термостатирования, что, в свою очередь, увеличивает время готовности и приводит к ухудшению точностных характеристик 1 . Наиболее близким к предлагаемому потехнической сущности и достигаемым результатам является устройство, содержащее маятниковый чувствительный элемент, закрепленный в корпусе, дифференциальный емкостный датчик угла, подключенный к источнику переменного напряжения и соединенный со входом усилителя, и датчик момента, подклЮ1 ченный к выходу усилителя 2. Недостатком конструкции этого акселерометра является наличие момента упругого противодействия в подвесе, возникающего при отклонении маятникового узла от нулевого положения, приводящее к нестабильности нулевого сигнала акселерометра. Цель изобретения - повышение точности измерения ускорения. Поставленная цель достигается тем, что последовательно емкостям датчика угла включены две идентичные катушки индуктивности, образующие с емкостным датчиком колебательный контур, причем частота источника переменного напряжения выбрана равной частоте половинной мощности колебательного контура В дорезонансной области его частотной характеристики. На фиг. 1 и 2 представлена упрощенная конструктивная схема акселерометра; на фиг. 3 и t - вариант схе3 . 90 мы с индуктивным датчиком угла; на фиг. 5 графики, поясняющие работу устройства. Акселерометр (фиг. l) содержит катушку 1 моментного датчика, маятниковый узел 2 с упругим подвесом и неподвижные пластины 3 и t емкостного датчика угла, подвижные пластины которого установлены на маятниковом узле для упрощения графической части не показаны . Неподвижные и подвижные пластины Зи 4 образуют дифференциальный емкостный датчик С и С j, угла -фиг. 2). К емкостям датчика включены последовательно две идентичные катушки L индуктивности, образующие с ним колебательный контур. Частота источника переменного напряжения Unur запитывающего контур, равна частоте половинной мощности колебательного контура в дорезонансной области его частотной характеристики. Для варианта конструктивной схемы акселерометра с индуктивным датчиком угла, образованным якорем 5 и катушками 6 и 7 (фиг. З) , L-f и Uj, катушки дифференциального индуктивного датчи ка с ийдуктивностями (фиг. «) включаются в колебательный контур путем по соединения двух идентичных емкостей С последовательно к катушкам L, и Lj. Акселерометр работает следующим о разом . При подключении емкостного датчик угла к источнику переменного напряже ния (фиг. 2) возникают электричес кие силы притяжения подвижных пласти к неподвижным 3 и : 1 C,Uc4 . 1 - где 5 и Oj - зазоры между подвижными инеподвижными пластинами ; С и Cj - емкости плеч дифференциального емкостного датчика;cл и Усг. разности потенциалов между подвижными и неподвижными пластинами датчика, имеющие вид лл /(LW-p-i) CjW . c.rij I VI где cJ - круговая частота источника переменного напряженияН,; действующее значение питающего напряжения; L и к соответственно эквивалентная индуктивность и активное сопротивление колебательного кйнтура. Равнодействующая этих сил равна 8w и ( lETor- Я ).)Ч.Мч. емкость каждой из плеч датчика угла при нейтральном положении маятникового узла 2; абсолютная диэлектрическая проницаемость средь между пластинами; площадь пластин; Н - смещение маятникового узла, отнесенное к зазору при нейтральном положении. Для источника переменного напряжения, частота которого равна частоте половинной мощности колебательного контура в дорезонансной области его Настотной характеристики, при малых Ьтклонениях маятникового узла 2 aS CohOJ3 При этом, в случае когда коэффициент при ц равен жесткости упругого подвеса, момент, создаваемый рав- . нодействующей, компенсирует упругий , момент подвеса маятникового узла. При наличии измеряемого ускорения, маятниковый узел отклоняется на угол Р(фиг. l) , изменяются емкости плеч ei KOCTHoro датчика и вырабатывается ток обратной связи, соответствующий измеряемому ускорению. Аналогичным образом работает вариант акселерометра, представленного на фиг. 3 и i. Наличие дрейфа нуля усилителя и атчика угла не приводят в предлагаемой конструкции к появлению нулевого сигнала акселерометра, так как жесткооть подвеса скомпенсирована отриательной жесткостью, вносимой датчиком угла. Таким образом достигается повышение точности измерения ускорения. .Формула изобретения Акселерометр, содержащий маятнико вый чуаствительный элемент, закрепле ный в корпусе, дифференциальный емкостный датчик угла, подключенный к источнику переменного напряжения и соединенный со входом усилителя, и датчик момента, подключенный к выходу усилителя, отличающийс я тем, что, с целью повышения точ ности измерения ускорений, последова тельно емкостям датчика угла включены две идентичные катушки индуктивности, образующие с емкостным датчиком колебательный контур, причем 9 частота источника переменного напряжения выбранг-з равной частоте половинной мощности колебательного контура в дорезонансной области его частотной характеристики. Источники информации, принятые во внимание при экспертизе 1.Навигация, наведение и стабилизация в космосе. Под ред. Дж. Э. Миллера. М., Машиностроение, 1970, с. 195, 201. 2.Акселерометр на кварцевой подвеске с силовой компенсацией. - Экспресс-информация. Испытательные приборы и стенды, 1970, N 6, реф. k2 (прототип).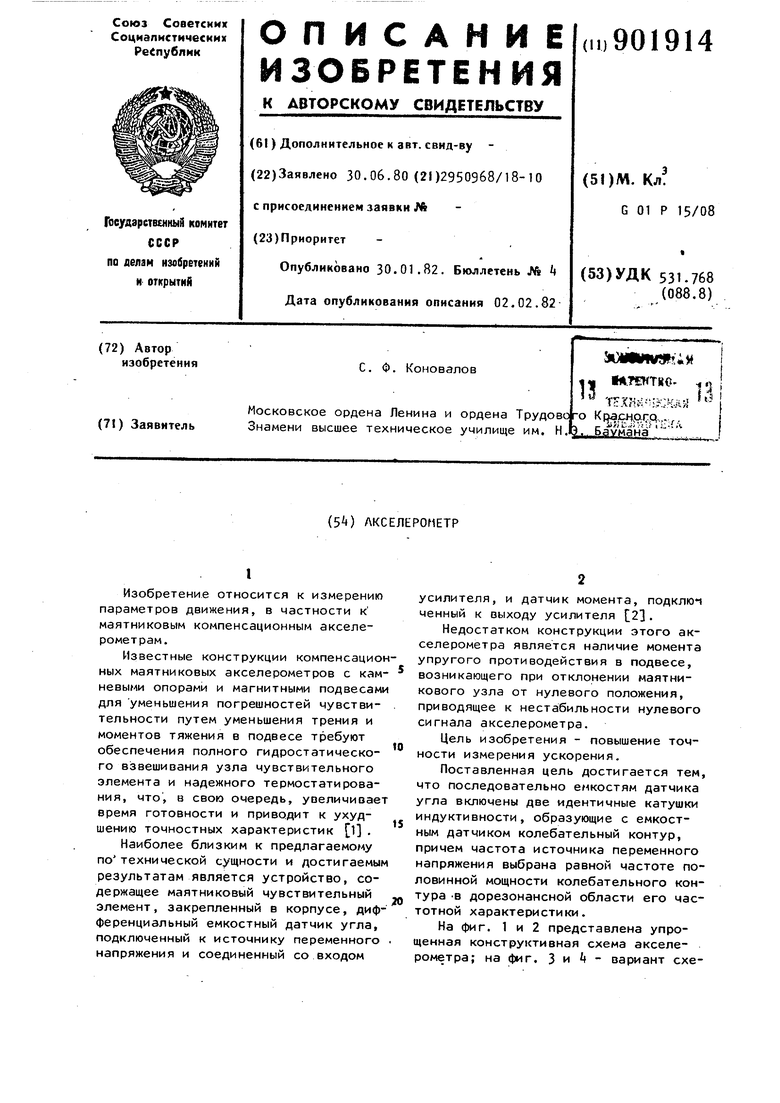
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ | 1997 |
|
RU2147751C1 |
| Поплавковый маятниковый акселерометр | 1981 |
|
SU1040425A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2132559C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2021 |
|
RU2758892C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441246C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| Компенсационный акселерометр | 1982 |
|
SU1067445A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| Емкостный датчик перемещений | 2020 |
|
RU2750131C1 |
(puzj
./л -Cf у. GI
}У Р
0 вых (Раг.2
жж
icci
Т
Р Sbfx / f риг.
г
-(f
