Изобретение относится к измерительной технике и может быть применено для измерения линейных или угловых перемещений, в частности при построении акселерометров прямого или компенсационного способа измерения.
Известен емкостный дифференциальный маятниковый датчик угла системы горизонтальной коррекции гироагрегата ГА-3 курсовой системы ТКС-П (Михайлв О.И., Козлов И.М., Гергель Ф.С. Авиационные приборы. М.: Машиностроение. 1977, на стр. 234, рис. 9.35). Датчик состоит из двух статорных пластин, подвешенных в виде маятников на внешней раме карданова подвеса и соединены с вторичными обмотками трансформатора, играющего роль источника напряжения. Роторная обмотка датчика жестко соединена с осью внутренней рамы карданного подвеса и электрически – с входом усилителя горизонтальной коррекции, на второй вход которого подключена средняя точка вторичной обмотки трансформатора. Таким образом, емкостный датчик представляет мостовую схему, в два плеча которого включены конденсаторы, емкости которых изменяются в зависимости от угла рассогласования между статорными пластинами и роторной пластиной, а двумя другими плечами моста являются вторичные полуобмотки трансформатора. Следует отметить, что при наличии угла рассогласования меняются площади обкладок конденсаторов, а расстояние между ними остается постоянным.
Однако в аналоге не указаны соотношения между конструктивными параметрами конденсаторов и основным параметром питающего напряжения – частотой питания, которые определяют чувствительность емкостного датчика.
Известен компенсационный акселерометр (патент РФ № 2233451, МПК G01P 15/13/ Баженов В.И. Вдовенко И.В.и др. Опубл.27.03.2004, бюл №9), в котором для определения угла отклонения инерционной массы используется дифференциальный ёмкостный датчик положения, который содержит корпус, установленную в нем пластину из монокристаллического кремния, имеющую внутреннюю неподвижную часть, внешнюю подвижную часть с первой и второй основными поверхностями, соединенную с внутренней неподвижной частью двумя упругими перемычками, которые образуют упругий подвес с осью, проходящей через оси изгиба упругих перемычек. На внешней подвижной части находятся подвижные электроды, и выполненные в виде металлизированных участков на установленной на стойке в корпусе плате неподвижными электродами. Подвижные и неподвижные электроды образуют два конденсатора, которые включены в два плеча моста, во вторые два плеча которого включены балластные резисторы. В одну диагональ включен источник питания – генератор переменного синусоидального напряжения заданной частоты, а в другую – включен усилитель, выход которого является выходом мостового ёмкостного датчика перемещений.
Однако в прототипе не указано, какими выбрать параметры конструкции собственно ёмкостного датчика и параметры генератора синусоидального напряжения, чтобы получить максимальную чувствительность.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в повышении чувствительности емкостного датчика перемещений.
Технический результат достигается тем, что в емкостном датчике перемещений, содержащим мостовую схему, в два плеча которой включены конденсаторы с возможностью изменения емкости в зависимости от перемещения подвижных пластин, при этом емкость одного из конденсаторов увеличивается, емкость другого конденсатора уменьшается в зависимости от направления перемещения, неподвижные пластины имеют общую точку, а подвижные пластины связаны с перемещаемым элементом, и в два других плеча включены балансные резисторы, имеющие общую точку, генератор синусоидальных напряжений подключен в одну диагональ мостовой схемы между общими точками конденсаторов и балансных резисторов и усилитель напряжения включен во вторую диагональ мостовой схемы, выход которого является выходом устройства, новым является то, что конструктивные параметры конденсаторов и круговая частота генератора синусоидального напряжения связаны функциональной зависимостью, определяющей настройку на максимальную чувствительность к перемещению
где 


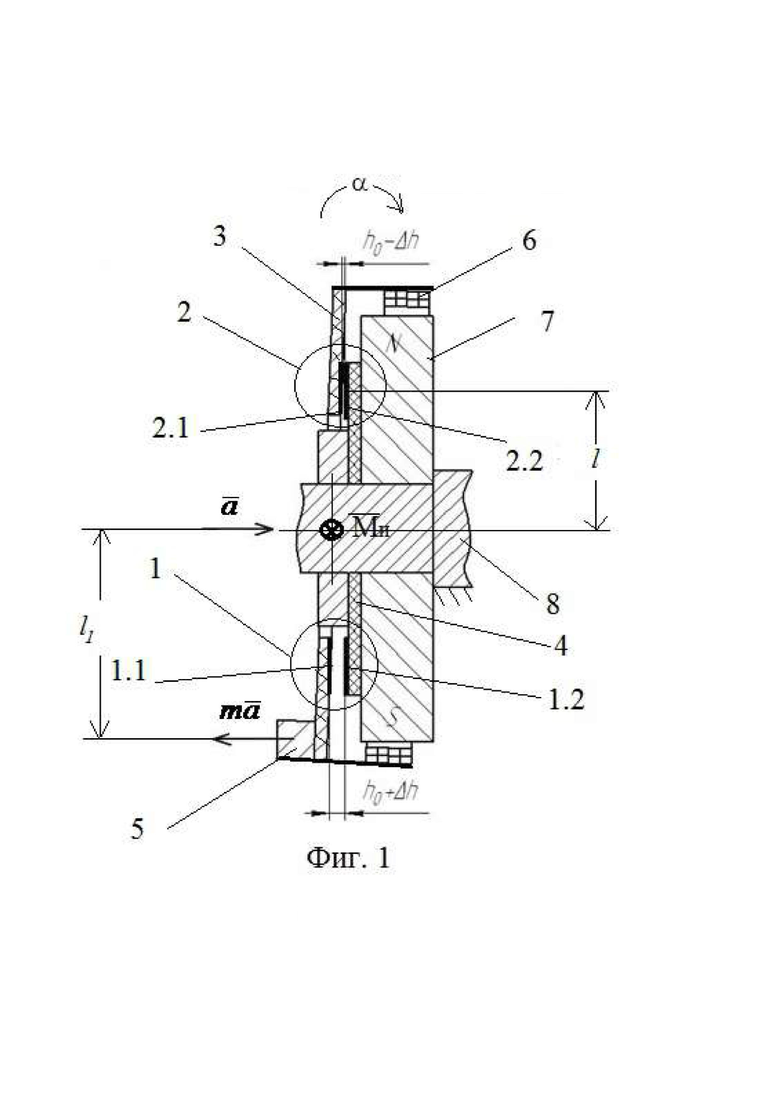
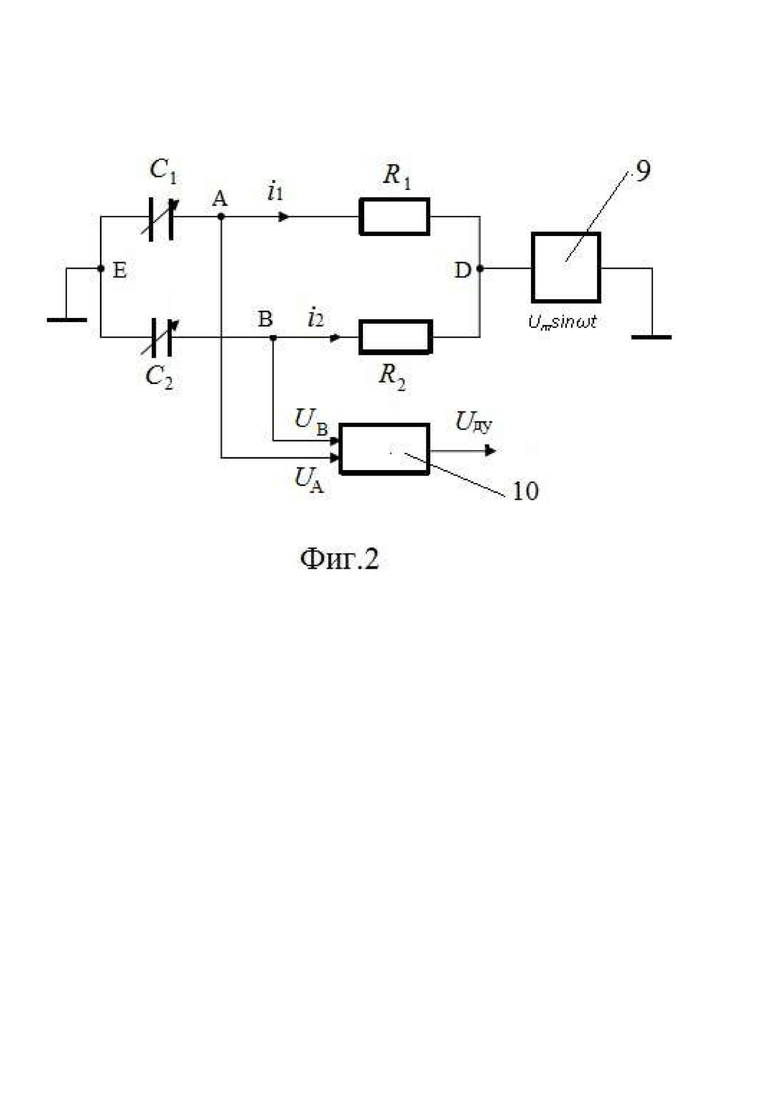
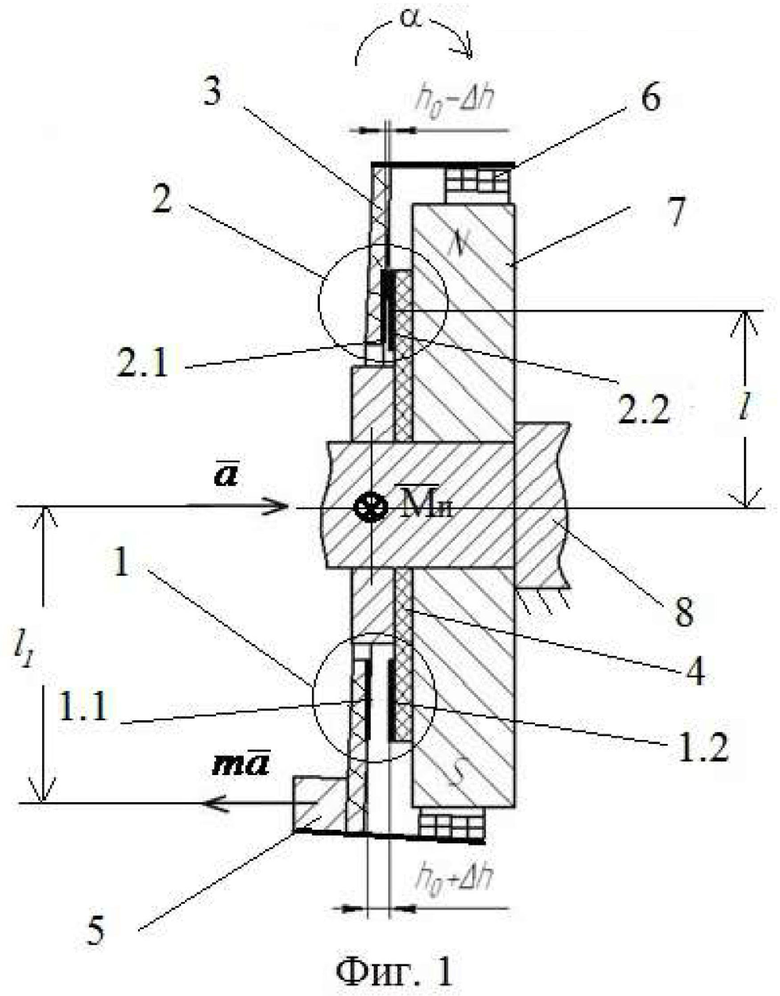
Сущность изобретения поясняется фиг.1 и фиг.2, на которых соответственно приведены: вариант кинематической схемы построения емкостного датчика перемещений и его электрическая схема.
На фиг.1 и фиг.2 приняты следующие обозначения:
1 – конденсатор 
2 – конденсатор 
1.1 и 2.1 – подвижные пластины конденсаторов
1.2 и 2.2 – неподвижные пластины конденсаторов
3 – подвижная кристаллическая пластина;
4 – неподвижная кристаллическая пластина;
5 – инерционная масса;
6 – катушка датчика моментов;
7 – магнит датчика моментов;
8 – корпус;
9 – генератор синусоидального напряжения;
10 – усилитель;













Работу емкостного датчика перемещений поясним на примере компенсационного акселерометра в соответствии с фиг.1, а получение условия максимальной чувствительности проведем на основании электрической схемы, представленной на фиг.2.
В соответствии с кинематической схемой фиг.1 конденсаторы 1 и 2 созданы подвижными и неподвижными пластинами 1.1 и 1.2 для конденсатора 1, емкость которого определяется выражением
и пластинами 2.1 и 2.2 для конденсатора 2, емкость которого определяется выражением
где в выражениях (1) и (2) 


Обкладки 1.1 и 1.2; а так же обкладки 2.1 и 2.2 наносятся на кремниевые пластины 3 и 4 путем металлизации. Расстояние между обкладками изменяется, когда кремниевая пластина 3 поворачивается вокруг оси подвеса, которая формируется упругими перемычками. При действии ускорения 


Для оценки чувствительности емкостного датчика перемещений рассмотрим его работу в соответствии с электрической схемой, представленной на фиг.2.
Генератор напряжения 10 включен в диагональ DE мостовой схемы, а усилитель 10 – в диагональ АВ мостовой схемы.
Выходное напряжение усилителя, которое является выходным напряжением емкостного датчика перемещений, будем формировать в комплексном виде в соответствии с формулой

где 

Так как выход мостовой схемы подключен к усилителю с большим входным сопротивлением, то комплексы токов в плечах ЕА и АD, а также в плечах ВЕ и ВD будут одинаковыми и соответственно равны
где емкости 

Тогда с учетом (4) и (5) комплексы напряжения в точках A и В будут равны
В соответствии с формулами (3) и (6) выходное напряжение емкостного датчика перемещений будет равно

С учетом (1) и (2) выражение (7) приобретает вид
Перейдем в (8) от комплексного вида 

Так как для реальных параметров 

где 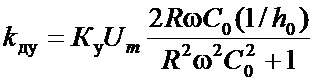
Крутизна характеризует чувствительность и зависит как от параметров конденсатора, так и частоты питания генератора, при этом, чем больше крутизна, тем выше чувствительность. Поэтому исследуем 


Откуда с учетом выражения 
которое определяет максимальную чувствительность емкостного датчика перемещений.
При выполнении условия (9) крутизна датчика перемещений будет равна
В частности условие (10) можно использовать для выбора оптимальной частоты напряжения генератора, которым питается емкостный мост.
Рассмотрим в качестве примера емкостный датчик перемещений, применяемый в компенсационном акселерометре А-15, который выпускается Раменским приборостроительным заводом (РПЗ).
Параметры емкостного датчика перемещений:




В соответствии с условием максимума чувствительности (10) определим круговую частоту напряжения генератора, задав балансное сопротивление 

И соответственно 
Исследования реальной характеристики показали, что по частоте имеется явный максимум чувствительности, и хорошая линейность выходной характеристики в пределах отклонения 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2132559C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ | 1997 |
|
RU2147751C1 |
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 1999 |
|
RU2172488C1 |
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 2003 |
|
RU2265816C2 |
| Устройство для стабилизации крутизны преобразования емкостных датчиков | 1972 |
|
SU506232A1 |
| ДАТЧИК РАСХОДА ГАЗА | 2001 |
|
RU2212020C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ КОМПАРАТОР НАПРЯЖЕНИЯ | 1994 |
|
RU2076328C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ УРОВНЯ ВОДЫ В РЕЗЕРВУАРАХ ВОДОНАПОРНЫХ БАШЕН | 1999 |
|
RU2149441C1 |
| Акселерометр | 1980 |
|
SU901916A1 |
| ДАТЧИК НУЛЕВОГО ПОЛОЖЕНИЯ | 1973 |
|
SU397743A1 |
Изобретение относится к измерительной технике и может быть применено для измерения линейных или угловых перемещений. Емкостный датчик перемещений содержит мостовую схему, в два плеча которой включены конденсаторы с возможностью изменения емкости в зависимости от перемещения подвижных пластин, при этом конструктивные параметры конденсаторов и круговая частота генератора синусоидального напряжения связаны функциональной зависимостью, определяющей настройку на максимальную чувствительность к перемещению 



Емкостный датчик перемещений, содержащий мостовую схему, в два плеча которой включены конденсаторы с возможностью изменения емкости в зависимости от перемещения подвижных пластин, при этом емкость одного из конденсаторов увеличивается, емкость другого конденсатора уменьшается в зависимости от направления перемещения, неподвижные пластины имеют общую точку, а подвижные пластины связаны с перемещаемым элементом, и в два других плеча включены балансные резисторы, имеющие общую точку, генератор синусоидальных напряжений подключен в одну диагональ мостовой схемы между общими точками конденсаторов и балансных резисторов и усилитель напряжения включен во вторую диагональ мостовой схемы, выход которого является выходом устройства, отличающийся тем, что конструктивные параметры конденсаторов и круговая частота генератора синусоидального напряжения связаны функциональной зависимостью, определяющей настройку на максимальную чувствительность к перемещению
где 


| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2233451C2 |
| Способ измерения ускорений и устройство для его осуществления | 1987 |
|
SU1492290A1 |
| Емкостной акселерометр | 1984 |
|
SU1174861A1 |
| US 2010223998 A1, 09.09.2010. | |||

