( З) ГРАДИЕНТОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| БИБЛИОТЕКА I | 1972 |
|
SU332402A1 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ПЕРЕНОСНОМ ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2256930C2 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2257593C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2012 |
|
RU2510500C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| Способ измерения составляющих гра-диЕНТА BEKTOPA МАгНиТНОй иНдуКции | 1979 |
|
SU813339A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНЫХ ФЕРРОЗОНДОВЫХ МАГНИТОМЕТРОВ | 2022 |
|
RU2793283C1 |
| Градиентометр | 1978 |
|
SU789949A1 |
| Квантовый градиентометр с переменной базой | 1983 |
|
SU1140068A1 |
t
Изобретение относится к магнитным измерениям и предназначено для измерения градиента постоянной магнитной индукции и его приращений.
Известен градиентометр, включающий два квантовых преобразователя, работающих с $х сигналом, .и электронный блок f1J.
Недостатком известного устройства является невозможность измерения компонент вектора градиента магнитного поля, так как в нем принципиально не предусмотрена возможность установки базовой оси по направлен1 ям составляющих вектора.
Известно также устройство, реализующее способ магниторазведки, основанный на измерении градиента ма1- нитного поля.
Известный градиентометр содержит чувствительную систему, механически сопряженную с теодолитом, и электронный блок, электрически связанный с чувствительной системой посредством кабеля. Поворотный узел Представляет собой теодолитный стол, имеющий горизонтальный круг и установленный на штативе. На подвижной части теодолитного стола закреплена вилка с горизонтальной осью вращения, на которую насажен вертикальный круг. На горизонтальной оси укреплена штанга, несущая на концах квантовые преобразователи. Поворотный узел имеет вертикальную ось вращения. Штанга с укрепленными на ней преобразователями может поворачиваться вокруг горизонтальной оси вращения на ЗбО . Углы поворота вилки и штанги отсчитываются по горизонтальному и вертикальному кругам соответственно 2..
Недостатком известного устройства является непостоянство угла между оптическими осями квантовых преобразователей и вектором магнитной индукции в процессе поиска положения вектора градиента модуля магнитной
39
индукции в пространстве. Это приводит ,к появлению значительной ориентационной погрешности, снижающей точность измерений.
Цель изобретения - повышение точности.
Для достижения указанной цели в градиентометр, содержащий два квантовых преобразователя, размещенных на концах немагнитной штанги, закрепленной на поворотном узле с вертикальной и горизонтальной осями вращения, введены дополнительная ось вращения, расположенная перпендикулярно плоскости, образованной горизонтальной осью вращения и штангой, и трехкомпонентный феррозондовый преобразователь, оси которого взаимно ортогональны, одна из осей параллельна штанге а другая совпадает с дополнительной осью вращения, при этом трехкомпонентный феррозондовый преобразователь размещен в центре штанги, а квантовые преобразователи укреплены под углом iS к штанге.
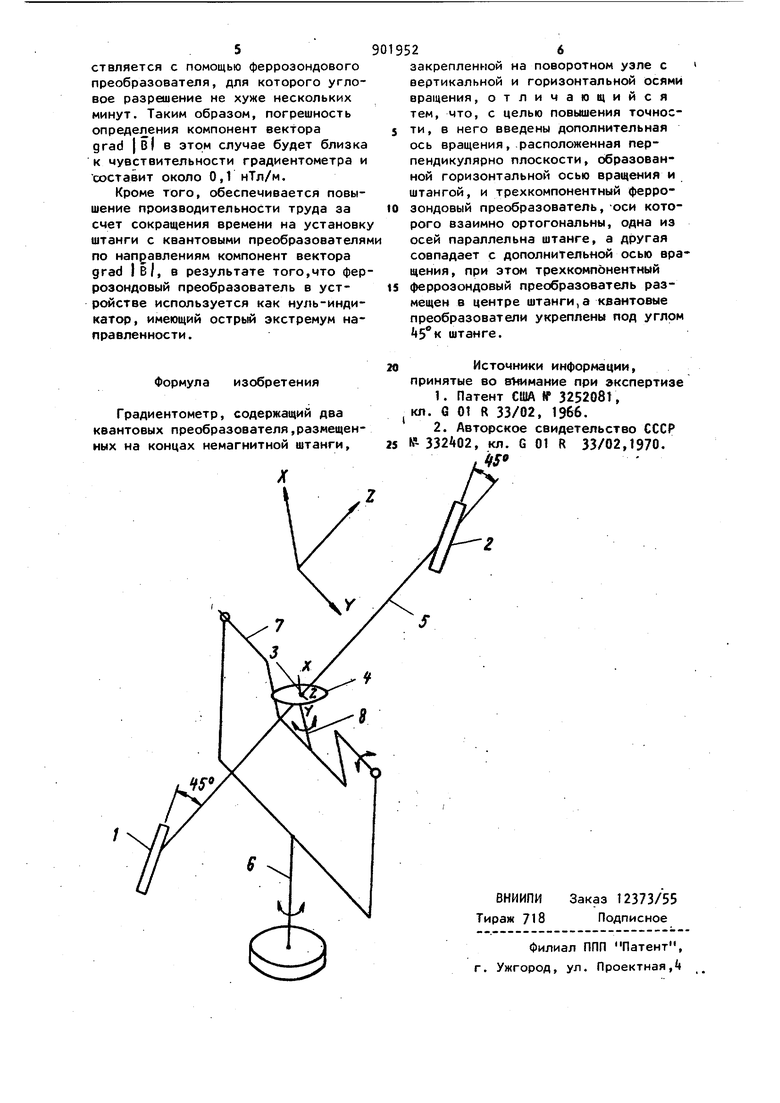
На чертеже изображен градиентометр.
Градиентометр, состоит из двух квантовых преобразователей 1 и 2, трехкомпонентного феррозондового преобразователя 3, подставки k электронного блока (не показан), нема)- нитной штанги 5 трех осей вращения вертикальной 6, горизонтальной 7 и дополнительной оси 8, расположенной перпендикулярно плоскости, образованной горизонтальной осью 7 и штангой 5. Квантовые преобразователи 1 и 2 закреплены на концах штанги 5 на равном удалении от центра вращения, причем они лежат в плоскости, образованной штангой 5 и осью 8, а их оптические оси составляют со штагой 5 фиксированный угол +5 . Феррозондовый преобразователь 3 установл на подставке Ц в центре вращения штанги 5, его оси X, Y и Z взаимно перпендикулярны, причем одна из осе (ось Z) ориентирована в направлении штанги 5 ось Y лежит в плоскости горизонтальной оси вращения, а ось X - в плоскости вертикальной оси вращения. Электронный блок соединен с преобразователями 1, 2 и 3 кабеле (не показан).
Градиентометр работает следующим образом.
524
После установки устройства на жестком основании, используя оси вращения 6, 7 и 8, штангу 5 ориентируют в предполагаемом направлении вектора
В (вектора магнитной индукции). Вращая штангу 5 в небольших пределах вокруг указанных осей, добиваются такого ее положения, при котором показания феррозондового преобразователя 3 по компонентам X и Y равны нулю, а показания по компоненте Z максимальны. Найденное положение штанги 5 фиксируют, так как оно соответствует установке ее вдоль направления векторе В.
По показанию разности сигналов квантовых преобразователей 1 и 2 производят отсчет значения компонен.ты ;гу вектора grad | В I в ортогональ9Z
ной системе координат XYZ.Дaлee штангу 5 поворачивают вокруг оси 7 примерно на угол (квантовым преобразователем 2 вниз) и, вращая ее 3 вокруг осей 6, 7 и 8 добиваются такого ее положения, при котором показания феррозондового преобразователя 3 по компонентам Z и Y равны нулю, а по компоненте X максимальны. Зафиксировав положение штанги 5 по квантовым преобразователям 1 и 2, производят отсчет значения компоненты - вектора grad . Для измеЭЛ g
рения компоненты -тг штангу 5 по5О
ворачивают вокруг дополнительной оси 8 примерно на угол 90 и уточняют ее положение по показаниям феррозондового преобразователя 3 показания компонент Z и Y - нулевые, компоненты X - максимальные. Штангу 5 фиксируют в найденном положении, и с помощью квантовых преобразователей 1 и 2 производят отсчет.
5 Таким образом, с помощью предлагаемого устройства могут измеряться g три компоненты вектора grad |1| : zy
9jB ЭВ
aY dz
При измерениях с помощью гоадиентометра сохраняется оптимальный и постоянный угол между осями преобразователей и вектором В, в результате чего ориентационная погрешность практически не сказывается на результатах. Установка штанги сквантовыми преобразователями по направлениям компонент вектора grad iBl осуще
