(54) СПОСОБ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ ГРАДИЕНТА ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАДИЕНТОМЕТР | 1994 |
|
RU2091806C1 |
| Устройство для измерения параметров неоднородности магнитного поля | 1979 |
|
SU864199A1 |
| Устройство для измерения градиента магнитной индукции | 1991 |
|
SU1800411A1 |
| Градиентометр | 1979 |
|
SU1095117A2 |
| Градиентометр | 1978 |
|
SU789949A1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента | 1982 |
|
SU1064251A1 |
| Способ определения магнитного момента дипольного источника поля и координат этого источника | 1985 |
|
SU1322208A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| Способ определения составляющей вектора магнитной индукции | 1990 |
|
SU1830493A1 |
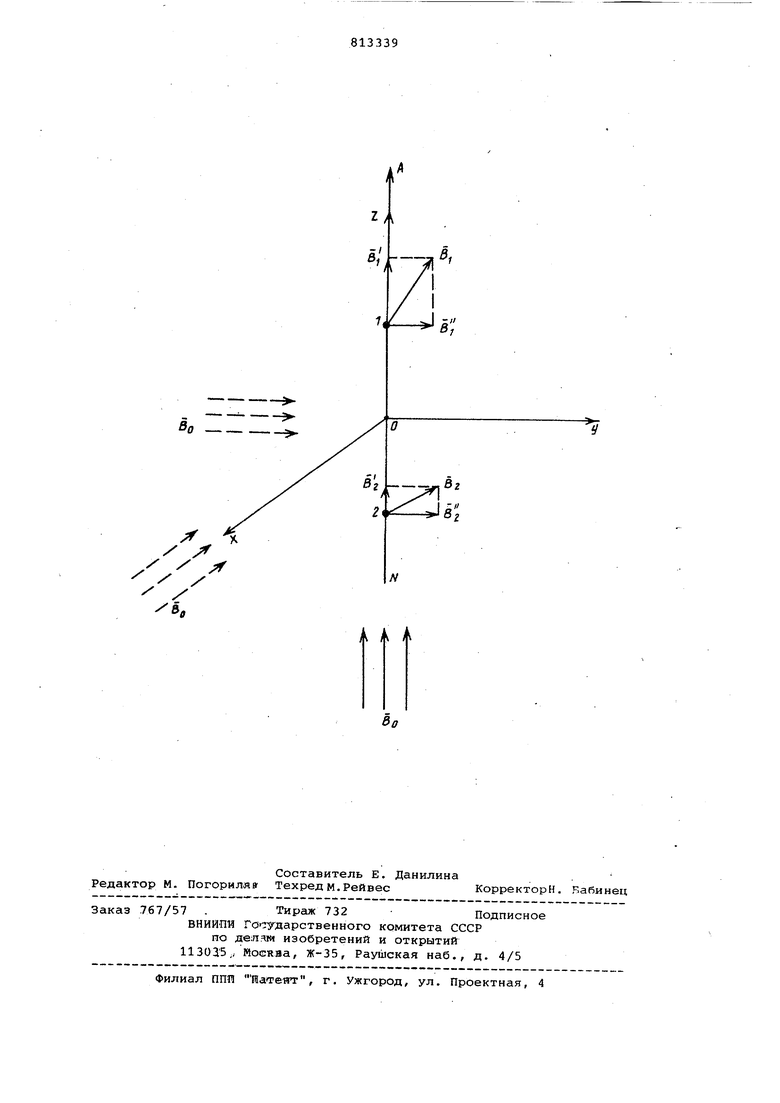
Изобретение относится к измерител ной технике и предназначено для изме рения составляющих градиента вектора магнитной индукции, с целью определения составлякнцих вектора магнитного момента источника магнитного поля. Известен способ измерения составляющих градиента вектора магнитной индукции, основанный на измерении направленными магнитометрическими преобразователями разности проекций вектора магнитной индукции на параллельные или соосные оси этих преобразователей в точках пространства. Устройство, реализующее данный способ, содержит два соосных однокомпонентных магнитометрических преобразователя, измеряющих разности проекций векторов магнитной индукции на оси этих преобразователей. По отноше нию этих разностей к расстоянию между магнитометрическими преобразовате лями судят о составляющих градиента вектора магнитной индукции 1. Недостатком известного способа яв ляется низкая точность измерения составляющих градиента вектора магн ной индукции, которая обусловлена влиянием геомагнитного поля на ре-. зультат измерения. Так, например при непараллельности осей магнитометрических преобразователей в 5 угловых секунд и при наличии поперечного однородного магнитного поля в 50000 нТ погрешность измерения составляющих градиента вектора магнитной индукции составляет примерно 1 нТ. Известен также способ определения составляющих градиента вектора магнитной индукции модульными магнитометрическими преобразователями, который основан на измерении модульными магнитометрическими преобразователями разности магнитной индукции в точках пространства в направлении оси, проходящей через центры преобразователей. Устройство, регшиэукядее данный способ, содержит два модульных например квантовых магнитометрнческих преобразователя, измерякадие разность магнитной индукции. По отношению этой разности к расстоянию между преобразователями определяют составляющие градиента вектора магнитной индукции 2 . Недостатком известного спосо;5а является то, что он обеспечивает измерение составляющих градиента вектора магнитной индукции только в том случае, когда однородного магнитного по ля нет, а вектор магнитного момента источника магнитного поля направлен вдоль упомянутой оси преобразователей или перпендикулярен ей. При нали чии однородного геомагнитного поля и его вариаций известный способ обес печивает измерение составляющих градиента модуля вектора магнитной индукции, приближенное значение которых определяется из соотношения ЭВ .|-1в-г Ва1 эг- лЕт 1 . 1 где В - модуль вектора магнитной индукции В; В, вектор геомагнитного поля; В векторы магнитной индукции, созданные источником магнитного поля в измеряемых точках -про странства; дЕ расстояние между магнитометрическими преобразователями/ Г- направление оси, проходящей через центры преобразователей. Из данного соотношения видно, что известный способ несет информацию только о составляющих градиента модуля вектора магнитной индукции и не дает информации о составляющих градиента вектора магнитной индукции, что также является недостатком известного способа и реализующего его устройства. Цель изобретения - повышение точности измерения. Цель достигается тем, что в спосо бе определения составляющих градиента вектора магнитной индукции/ основанном на измерении разности магнитной индукции в точках пространства в направлении базовой оси, проходящей через центры преобразователей, на преобразователи воздействуют сильным однородным магнитным полем, ориентируют базовую ось поочередно вдоль вектора сильного однородного магнитного поля и в двух взаимно ортогонал ных направлениях, каждое из которых перпендикулярно вектору сильного од нородного магнитного поля, дважды изменяют ориентацию вектора сильног однородного магнитного поля в напра лениях ортогональных друг другу и п воначальному, при каждом направлени сильного однородного магнитного пол ориентируют базовую ось поочередно трех направлениях, каждое из которы параллельно одной из первоначальных ориентации упомянутой оси, при этом измерения разностей магнитных индук ций осуществляют после каждой ориен тации базовой оси. На чертеже изображены модульные магнитометрические преобразователи в прямоугольной системе координат и воздействуюоще на них магнитные поля индукции в точках измерения. Согласно способу векторсильного однородного магнитного поля Те направлен вдоль базовой оси AN, проходящей через центры модульных .приеобразователей 1 и 2, при AN ориентирована вдоль оси 02 прямоугольной системы координат X, Y, Z. Расстояние между преобразователями 1 и 2 равно значению б . На преобразователи 1 и 2 действуют магнитные поля 1 и В 2. созданные источником магнитного поля. Вектор B-f разложен на два ортогональных вектора В и ,. один дав которых ) совпадают с, осьюAN, а другсЗ (BjJ ) - перпендикулярен к ней. Вектор В2 разложен на два ортогональных вектора § и Bg, которых (во. ) совпадает с осью AN, а другой (в4 ) - перпендикулярен-к ней. Преобразователи 1 и 2 измеряют модули вакторов магнитной индукции , значения которых определяют из соотношений b,. . По. отношению разности и к I, определяют составляющую градиенту вей.тора магнитной индукции В в точке О по направлению оси OZ, значение которой равно ,,,, J эг е /02 Таким образом, при воздействии сильного однородного магнитного поля 6 на модульные магнитометрические преобразователи 1 и 2, каждый из них реагируют на проекцию результирующего вектора магнитной индукции или на направление упомянутого вектора BQ, т.е. модульные преобразователи 1 и 2 становятся в этом случае компонентными. При этом, чем В« больше В и В, тем влияние поперечных полей В и Bg . Если BQ Bi и Bjj D, то влиянием и В пренебречь. Действительно, при заданном динамическом диапазоне измерения магнитйой индукции каждым преобразователем 1 и 2 можно воспроизвести В«з такого значения, что погрешность, обусловленная влиянием поперечных магнитных полей, будет меньше порога чувствительностей преобразователей, а следовательно повысится точность мерения упомянутых составляющих. г , Определив -2- изменяют направление - Э i оси AN с расположенными на ней преобразователями 1.И так, чтобы эта ось совпала с осью ОХ и определяют составляющую градиента вектора магнитной индукции 1 в точке О по направлению оси ОХ, значение которой равно grad(g)-. Определив изменяют направление оси AN с расположенными на ней преобразователями 1 и 2 так чтобы эта ось совпадала с осью OY и определяю составляющую градиента вектора магнитной индукции В в точке О по направлению оси OY, значение которой №) v-ad, Ч & JC 0-У 3 V t /OV Для определения составляющих -ЭБх ЭБх градиента вектора магнитн V - индукции в точке О вектор Вонаправл ют вдоль оси ОХ, а ось AN с преобра (зователями 1 и 2 поочередно ориенти руют в трех направлениях вначале вдоль; оси ОХ, а затем - вдоль осей OY и OZ, при этом измерение разностей магнитной индукции осуществляют после ка кдой очередной ориентации оси AN. По отношению разностей магни ной индукции к 1 определяют упомяну тые составляющие. Для определения со ЭВу ЭВу ЭВу ставляющих градиента Эх 3v Эх вектора магнитной индукци.и в точке О вектор Во направляют вдоль оси OY, ось AN с преобразователями 1 и 2 поочередно ) ориентируют в трех направ лениях - вначале вдоль оси ОХ, а затем вдоль осей OY и OZ, при этом измерения разностей магнитной индукции осуществляют после каждой очеред ной ориентации оси AN. По отношению разностей магнитной индукции к 2 определяют упомянутые составляющие. Способ может быть реализован с по мощью известного устройства, содержа щего штангу с расположенными на ее концах двумя квантовыми магнитометри ческими преобразователями, каждый из которых реагирует на м.одуль вектора магнитной индукции. Ориентируя штангу с преобразователями поочередно в трех направлениях - вначале вдоль ве тора геомагнитного поля В-, а зат.ем в двух взаимно ортогональных направлениях, каждое из которых перпендикулярно вектору В, измеряют разности магнитных индукций между упомянутыми преобразователями после каждой очередной ориентации штанги с данным преобразователями. По отношению разностей магнитной индукции к расстоянию между квайтовыми преобразователя ми определяют три составляющие гради ента вектора магнитной индукции. Измерение- трех составляквдих градиента вектора магнитной индукции уже обеспечивает возможность определения вектора магнитного момента источника магнитного поля по известным расстоянию до этого источника и направлению на него, что имеет актуальное значение в различных областях науки и техники, например в геофизике, навигации, медицине, биологии и т.д. Таким образом, предлагаемый способ, в отличие от известных, обеспечивает измерение составляющих градиента вектора магнитной индукции с высокой точностью как в геомагнитном поле, так и при отсутствии его, например в космическом пространстве, в магнитных экранах и т.д. Кроме того, в способе отсутствует влияние на результат измерения (однородного или неоднородного) поперечного магнитного поля, что обеспечивает повышение точности измерения составляющих градиента вектора магнитной индукции более чем на порядок. Формула изобретения Способ измерения составляющих градиента вектора магнитной индукции,.основанный на измерении разности маггитной индукции в точках пространства в направлении базовой оси, проходящей через центры преобразователей, отличающийся тем, что, с целью повышения точности измерения на преобразователи воздействуют сильным однородным магнитным полем, ориентируют базовую ось поочередно вдоль вектора сильного однородного магнитного поля и в двух взаимно ортогональных направлениях, каждое из которых перпендикулярно вектору сильного однородного магнитного поля, дважды изменяют ориентацию вектора сильного однородного магнитного поля в направлениях ортогональных друг другу и первоначальному, при каждом направлении сильного однородного магнитного поля ориентируют базовую ось поочередно в трех направлениях,каждое из которых параллельно одной из первоначальных ориентации упомянутой оси,при этом измерения разностей .магнитных индукций осуществляют после каждой ориентации базовой оси. Источники информации, принятые во внимание при экспертизе 1.Патент .США № 3286169, кл. 32443, 1969. 2.Афанасьев Ю.В. и др. Магнитометрические преобразователи, приборы, установки. Л., Энергия., 1972, с. 227-228.
