I
Изобретение относится к области автотра.кторостроения, в частности к системам блркировки дифференциалов, преимущественно колесных тракторов.
Известен блокируемый дифференциал транспортного средства, содержащий .установленные в корпусе полуосевые шестерни, крестовину, сателлитные шестерни, посредством втулок установленные на осях крестовины и введенные в зацепление с полуосевыми шестернями, и гидроцилиндр для перемещения крестовины с системой его управления, поршень которого связан кинематически с крестовиной tl3.
Недостатками данного устройства является сложность конструкции, так как используются две системы управления дифференциалом, снижение бло-. кирующих свойств Дифференциала в процессе работы.
Цель изобретения - упрощение конструкции.
Поставленная цель достигается тем, что отверстия в корпусе дифференциа ла и втулках под оси крестовины выполнены прямоугольной формы, большая поперечная ось которых параллельна оси вращения крестовины дифференциала , а гидроцилиндр выполнен двухсторонего действия и его управляющие полости связаны с системой управления.
to
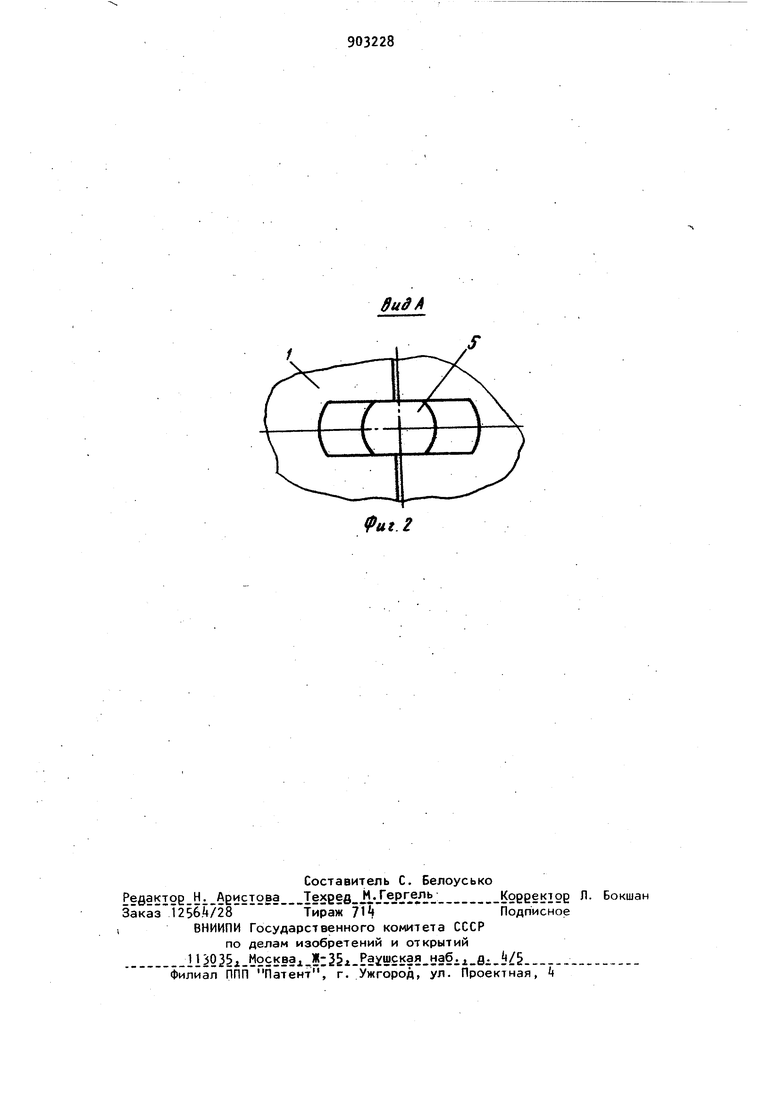
На фиг. 1 изображен дифференциал транспортного средства; на фиг. 2 вид А на фиг. 1.
Блокируемый дифференциал транспоруного средства содержит корпус 1,
IS полуосёвые шестерни 2 и 3 сателлиты Ц, крестовину 5 связанную с .поршнем 6. Сателлит вращается на втулке 7. Поршень 6 удерживается в среднем положении пружинами 8 и 9- Полости .10 и 11, образованные поршнем 6 в отверстии полуосевой шестерни 3.; связаны трубопроводами 12 и 13 через распределитель И с источником давления 15 390 Дифференциал работает следующим образом. Когда одно из колес например, левое , попадает в плохие сцепные усло вия,то водитель воздействует на распределитель, соединяет источник давления с полостью 10. При этом поршень 6 перемещается вправо и пере мещает крестовину 5. Крестовина при перемещении изменяет плечи приложения окружных сил в зацеплении сателлитов k и полуосевых шестерен 2 и 3Окружное усилие в зацепление сателлита 4 с полуосевой шестерней 3 возрастает, а в зацеплении с полуосевой шестерней 2 уменьшается. При этом сателлит остается в состоянии покоя, так как моменты сил относительно оси крестовины выравниваются. Крутящий момент на колесе, находящемся в лучших сцепных условиях, будет больше по сравнению с моментом на колесе с худшими сцепными условиями. При наличии относительного вращения полуосевых шестерен и смещении крестовины перераспределение моменто между колесами будет, так как хотя сателлит находится в том же положении, но точка приложения равнодейст вующей окружности силы, которая действует на сателлит, изменяется. Сила передается от корпуса дифференциала через ось крестовины на втулку, при этом оси крестовины.изменяют свое первоначальное положение относительно втулки, следовательно точкаi приложения равнодействующей силы при взаимодействии втулки и сателлита изменяется, т.е. равнодействующая .смещается относительно геометрическо оси сателлита. Так как точка приложе ния равнодействующей силы изменяется и момент на полуосевых шестернях изменяется тоже. При этом вращение полуосевых шестерен возможно только в случае, если по дорожным условиям колесам оси необходимо пройти разные пути (поворот, кинематическое рассог ласование под колесами ввиду неодина кового профиля дороги под колесами). Данный дифференциал не вызывает потерь на трение, так как перераспре деление моментов происходит не за счет момента трения, а за счет изменения плеча приложения равнодействую щей силы на сателлите. При преодолеНИИ труднопроходимого участка водитель возвращает распределитель в пер воначальное положение и под действие пружины 9 поршень возвращается в среднее положение, увлекая за собой крестовину. При движении на повороте, когда крестовина 5 смещена, дифферен-циал работает без перераспределения йоментов, так как сателлит имеет возможность вращаться вокруг втулки 7Предложенный дифференциал позволяет получить постоянное перераспределение момента, 1/то необходимо при выполнении некоторых сельхозработ , например пахоты когда одно из колес постоянно находится в худших сцепных условиях. Это достигается перемещением крестовины в сторону колеса с лучшими сцепными условиями. При этом водитель исключает раздельное буксование колес и тем самым повышает производительность агрегата. При движении на повороте нет необходимости выключать блокировку дифференциала, так как колеса свободно проворачиват ются относительно друг друга при равных независимо от значения моментах на их полуосях. Изобретение позволяет упростить конструкцию блокируемого дифференциала, сохраняя при этом принцип перераспределения крутящих моментов на полуосях, что повышает проходимость транспортного средства. Формула изобретения Блокируемый дифференциал транспортного средства, содержащий установленные в корпусе полуосевые шестерни, 1срестовину, сателлитные шестерни, посредством втулок установленные на осях, крестовины и введенные в зацепление с полуосевыми шестернями, и гидроцилиндр для перемещения крестовины с системой его управления, поршень которого связан кинематически с крестовиной, отличаю щ и и с я тем, что, с целью упрощения конструкции., отверстия в корпусе дифференциала и втулках под оси крестовины выполнены прямоугольной формы,большая поперечная ось которых параллельна оси вращения.крестовины дифференциала, а гидроцилиндр выполнен двухстороннего действия и его управляющие полости связанные с системой управления Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР Г , кл. В 60 К 17/20, 19б9 (прототип).
в ид А

| название | год | авторы | номер документа |
|---|---|---|---|
| Блокируемый дифференциал транспортного средства | 1980 |
|
SU895734A1 |
| Дифференциал транспортного средства | 1984 |
|
SU1172758A1 |
| Дифференциал транспортного средства | 1980 |
|
SU918126A1 |
| ДИФФЕРЕНЦИАЛ | 2008 |
|
RU2397390C1 |
| Принудительно блокируемый конический дифференциал транспортного средства (варианты) | 2019 |
|
RU2711320C1 |
| Дифференциал транспортного средства | 1985 |
|
SU1350051A1 |
| Принудительно блокируемый конический дифференциал транспортного средства (варианты) | 2019 |
|
RU2706622C1 |
| Принудительно блокируемый конический дифференциал транспортного средства | 2020 |
|
RU2731829C1 |
| Самоблокирующийся дифференциал транспортного средства | 1987 |
|
SU1428604A1 |
| САМОБЛОКИРУЮЩИЙСЯ КОНИЧЕСКИЙ ДИФФЕРЕНЦИАЛ | 1990 |
|
RU2090793C1 |