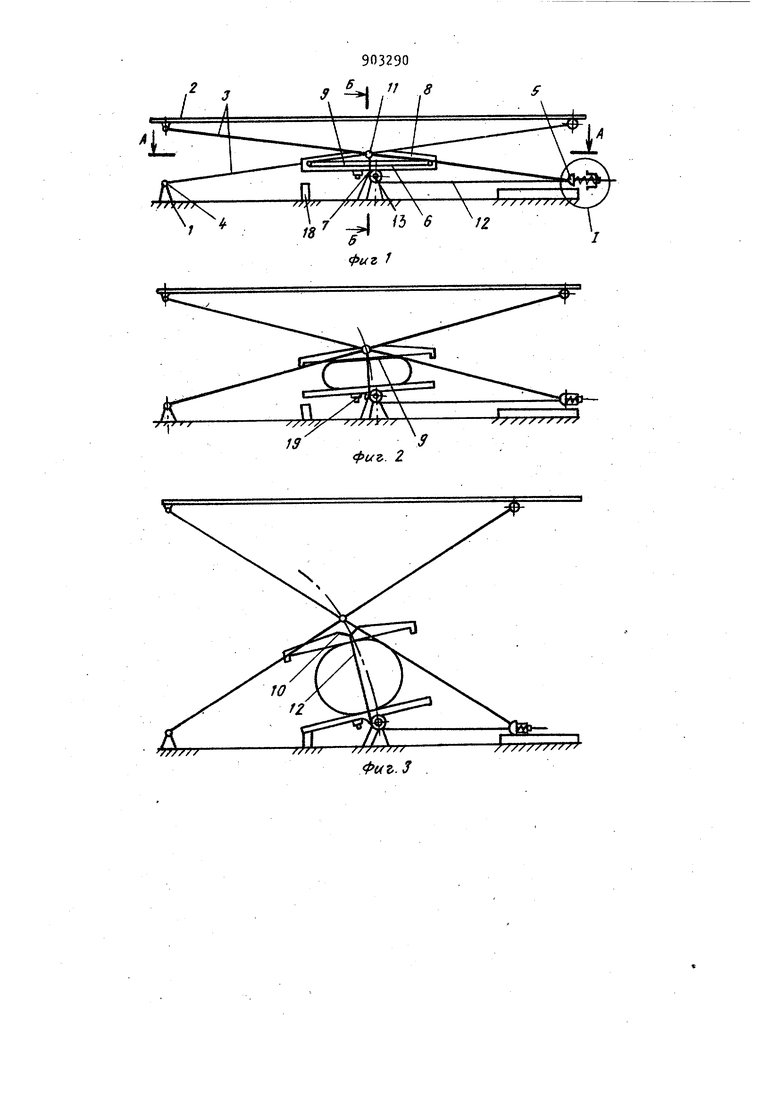
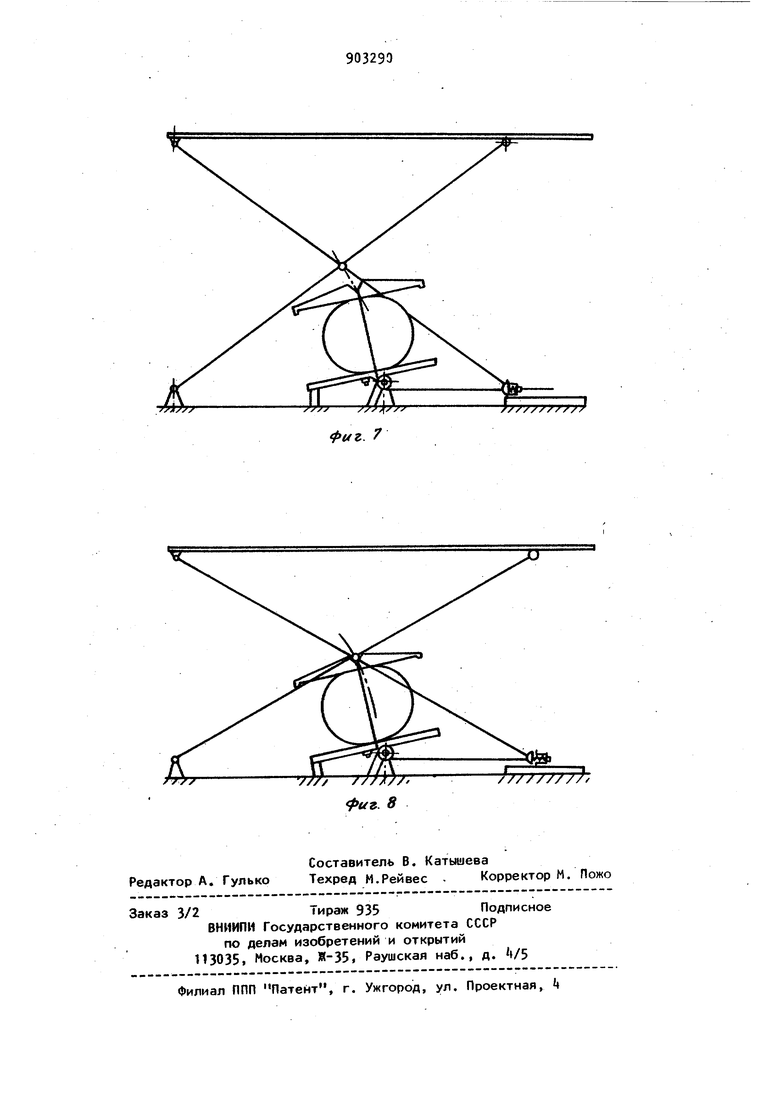
(5) ГРУЗОПОДЪЕМНЫЙ СТОЛ Изобретение относится к машиностроению, а именно к грузоподъемным механизмам. ИчЧвестен грузоподъемный стол, содержащий основание и подъемную от привода платформу, смонтированную на двух парах перекрещивающихся рычагов , соединенных между собой центральной осью, при этом один конец одного рычага каждой пары закреплен на основании с возможностью перемеще ния вдоль него, а другой - шарнирно 1. Недостатком его является сложност конструкции из-за наличия гидростанций , многообразия деталей силового цилиндра и плунжера, ограниченность его функциональных возможностей. Цель изобретения - расширение фун циональных возможностей и упро1цение конструкции стола. Цель достигается тем, что грузоподъемьлйй стол снабжен опорой, шарнйрно закрепленной на основании, и толкателем с пазом для центральной оси рычагов, соединеннь1м с помощьп гибких тяг, огибающих блоки, закрепленные на основании, с подвижными концами рычагов, при этом привод выполнен в виде эластичного шланга, соединенного с источником сжатого воздуха и расположенного между толкателем и опорой, а оси блоков расположены на одной высоте с шарниром крепления опоры и смещены в сторону подвижных концов рычагов на величину их радиуса, который равен расстоянию от оси шарнира опоры до плоскости, в которой лежат нижние оси рычагов. Гибкие тяги соединены с подвижными концами рычагов через подпружиненные регулируемые шайбы. На основании установлен упор для .ограничения угла поворота опоры. На фиг. 1 показан грузоподъемный стоя, платформа в крайнем нижнем положении; на фиг. 2 - то же, платформа в промежуточном положении; на 3S фиг. 3 - то we, платформа в верхнем положении; на фиг. k - разрез А-Л на фиг,1; на фиг. 5 - разрез Б-Б на фиг.1; на фиго 6 - узел I на на фиг. 7 платформа в крайнем верх Hei-i положении, соответствущем ее максимальному ходу; на фиг. 8 - плат Ссрма в верхнем положении, соответ0iвующем ее минимальному ходу„ Грузоподъемный етол состоит из не подвижного основания 1, подвижной платформы 2, опирающуюся на две пары шарнирно соединенных между собой рычагов 3, образующих нюрнбергские нож ницы и установленных на основании 1 . посредством нижних неподвижной k и лодвижной, относительно него, 5 осей. Между опорой 6 при помощи шарнира 7, соединенной с основанием 1, и толкателем 8 помещен эластичный шлан 9 о По продольной оси симметрии толкателя 8 выполнен трехугольный в поперечном сечении паз 10 (фиг„ ) взаимодействующий с центральной осью М стола. Толкатель 8 при помощ гибких элементов 12, огибающих установленные на основании 1 ролики 13, кинематически связан с осью 5. Гибкие элементы 12 крепятся к торцам толкателя В в точках, лежащих ниже паза 10 на его оси симметрии, а противоположные концы гибких элементов 12 соединены с резьбовым стержнем k, на котором с возможностью регулирования при помощи гаек 15 установлена шайба 16 с пружиной 17 (фиг. 6). Ось шарниров 7 находится на одной высоте с осью роликов 13.. При этом ось роликов 13 смещена в сторону оси 5 на величину радиуса роликов 13 равного расстоянию от оси шарниров 7 до плоскости, в коTopovi лежат оси и 5. На основании 1 установлен упор 18, взаимодействую щий с опорой 6 при ее наклоне. Подвод сжатого воздуха к шлангу 9 осуществляется через щтуцер 19, установленный на опоре 6, Грузоподъемный стол работает следующим образом. Через штуцер 19 опоры 6 в шланг 9 подается сжатый воздух. Шланг 9 увеличиваясь в объемеу перемещает толкатель 8 и вместе с ним подвижную ось 11 стола, положение которой отно сительно толкателя 8 фиксируется пазом 10„ Рычаги 3 взаимодействуя с .осью 11 , перемещают платформу 2 вверх до положения изображенного на фиг. 2. При этом вместе с толкателем 8на такую же величину перемещаются связанные с ним посредством гибких элементов 12 регулировочные шайбы 16, которые, двигаясь по направлению к подвижной- оси 5, сжимают пружины 17. Проксходит это потому, что при подъеме платформы 2 скорость движения оси 5 меньше, чем скорость движения толкателя 8 и шайб 1б, В положении стола,изображенном на фиг. 2, регулировочные шайбы 16, догнав подвижную ось 5, вошли с ней в соприкосновение. Ось 11, двигаясь по окружности относительно оси 4,одновременно с.перемещением вверх смещается горизонтально по направлению к оси k, Благодаря наличию шарнира 7, опора 6поворачивается таким образом, что вектор результирующей нагрузки от оси 11 постоянно направлен перпендикулярно опоре 6 и проходит через шарнир 7 о После соприкосновения шайб 16 с осью 5 дальнейшее перемещение оси 11 и, соответственно, платформы 2 с грузом происходит в результате перемещения оси 5 под воздействием шайб 16 Поскольку при дальнейшем передвижении оси 5 скорость вертикального перемещения оси 11 стола продолжает превышать скорость горизонтального перемещения оси 5, ось 11 открывается от поверхности паза 10 толкателя 8 и перемещается до положения, изображенного на фиг.З. При этом опора 6 поворачивается на шарнире 7 до соприкосновения с упором 18, что соответствует максимальному ходу толкателя 8. Вследствие того, что ось шарниров 7опоры 6 расположена на одной высоте с осью роликов 13 и расстояние между ними равно радиусу роликов 13, гибкие элементы 12 на участке между толкателем 8 и опорой 6 обеспечивают передачу усилия от толкателя 8 на подвижную ось 5 по оси симметрии поперечного сечения эластичного шланга 9и линия действия этого усилия проходят через шарниры 7 В результате чего эластичный шланг 9 не испытывает никаких боковых нагрузок, т.е. работает в нормальном режиме. Это обстоятельство позволяет обойтись без направляющих и специального крепления шланга 9 к опоре 6 и толкателю 8. При опускании платформы 2 в нижнее положение работа стола происходит в обратной последовательности. При достижении плат(юрмой 2 крайнего нижнего положения пружины 17 возвращают шайбы 16 в исходное положение (фиг, 1), ликвидируя одновременно провисание гибкого .элемента 12. При необходимости использования стола в режиме минимального усилия подъема и максимальной высоты хода платформы 2 (фиг. 7) регулировочные шайбы 16 предварительно перемещают до соприкосновения с подвижной осью 5 и фиксируют их положение на резьбовом стержне Н гайками 15. При подаче сжатого воздуха в эластичный шланг 9 толкатель 8, перемеидаясь вверх, одновременно через гибкие элементы 1. Иошайбы 16 заставляет переме11аться подвижную ось S, ход которой в этом случае равен ходу толкателя 8, При этом ось 11 будет перемещаться без взаимодействия с толкателем 8, так как ее скорость перемещения боль ше скорости толкателя и, соответственно , оси 5. Опускание платформы 2 происходит в обратной последовательности. При необходимости использования стола в режиме максимального усилия подъема и минимальной высоты хода платформы 2 (фиг. 8) шайбы 16 предварительно перемещают на максимальное удаление от оси 5. В этом случае подъем платформы 2 происходит от начала до конца путем взаимодействия толкателя 8 с осью 11 стола и шайбы 16, за весь период подъема платформы 2 с осью 5 не соприкасаются. Применение настоящего изобретения позволяет снизить трудоемкость изготовления на 50%, так как не требует высокой точности и условий специализированного производства, расширить его функциональные возможности. 0 Формула изобретения 1. Грузоподъемный стол, содержащий основание и подъемную от пр41вода платформу, смонтированную на двух парах перекрещивающихся рычагов, соединенных между собой центральной осью, при этом один конец одного рычага каждой пары закреплен на основании с возможностью перемещения вдоль него, а другой - шарнирно, о т личающийся тем, что, с целью расширения его функциональных возможностей и упрощения конструкции, он снабжен опорой, шарнирно закрепленной на основании, и толкателем с пазом для центральной оси рычагов, соединенным с помощью гибких тяг, огибающих блоки, закрепленные на основании, с подвижными концами рычагов , при этом привод выполнен в виде эластичного шланга, соединенного с источником сжатого воздуха и расположенного между толкателем и опорой, а оси блоков расположены на одной высоте с шарниром крепления опоры и смещены в сторону подвижных концов рычагов на величину их радиуса, который равен расстоянию от оси шарнира опоры до оси плоскости, в которой лежат нижние оси рычагов. 2.Грузоподъемный стол по п.1, отли.чающийся тем, что гибкие тяги соединены с подвижными концами рычагов через подпружиненные регулируемые шайбы. 3.Грузоподъемный стол по пп.1 и2,отличающийся тем, что на основании установлен упор для ограничения угла поворота опоры. Источники информации, принятые во внимание при экcneptизe 1. Авторское свидетельство СССР f- 527377, кл. В 66 F 7/08,1975 (прототип). гл l f 903290
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2308412C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2401795C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385285C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407694C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2004 |
|
RU2280007C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |