Изобретение относится к регулируемым электроприводам постоянного тока, содержащим упругие механические передачи, работающим со значительными динамическими нагрузками и обеспечивающим контроль натяжения этих упругих, передач.
Известно устройство, предназначенное для автоматического регулирования режима бурения при непрерывном контроле уровня вибрации станка и.снижении нагрузок вобо- рудовании станка, обеспечивающее все это за счет задатчика уровня вибраций. Устройство содержит задатчик уровня вибрации, задатчик уровня амплитуды низкочастотной составляющей вибрации, усилители и нуль- органы, соединенные с исполнительным механизмом пневмодросселя.
Недостатками данного устройства являются сложность системы управления, собранной на транзисторной и трансформаторной базе, отсутствие контроля динамических усилий в передачах электромеханической системы и невозможность контроля жесткости упругих передач.
Известна система регулирования скорости бурового насоса, содержащая двигатель постоянного тока, подключенный к тиристорному преобразователю, вход которого соединен с выходом регулятора тока, одним входом связанного с датчиком тока двигателя, а другим - с выходом регулятора скорости, первый вход которого подключен к задатчику скорости, а второй вход подсоединен к датчику скорости двигателя насоса.
Недостатками этой системы являются отсутствие измерения упругого момента на валу двигателя насоса и невозможность создания систем управления, замкнутых по нагрузкам в упругих связях, обеспечивающих улучшение динамических характеристик.
Наиболее близкой к предлагаемой является система автоматического управления бурового механизма, содержащая двигатель постоянного тока привода бурового насоса, подключённый одним входом к тиристорному преобразователю, вход которого соединен с выходом регулятора тока, а другим входом - к датчику тока. Первым входом регулятор тока соединен с выходом регулятора скорости, первый вход которого подключен к задатчику скорости, а второй вход подсоединен к датчику скорости двигателя насоса. Устройство содержит также датчик упругого момента и дифференцирующее звено.
Недостатком этой системы управления является отсутствие контроля за состбяни- ем передачи, а также за изменением жесткости упругой связи.
Цель изобретения - контроль натяжения ременной передачи буроврго насоса. Поставленная цель достигается тем, что система автоматического управления бурового механизма, содержащая двигатель постоянного тока привода бурового насоса, подключенный одним входом к тиристорному преобразователю, вход которого соединен с выходом регулятора тока, а другим входом - к датчику тока, первым входом регулятор тока соединен с выходом регулятора скорости, первый вход которого подключен к задатчику скорости,, а второй вход подсоединён к датчику скорости двигателя насоса, при этом вал двигателя связан с датчиком упругого момента, выход которого подключен к дифференцирующему звену, подсоединенному к третьему входу регулятора тока, снабжена выпрямительным диодом, элементом НЕ и частотомером, при этом выход дифференцирующего звена подключен к последовательно соединенным
выпрямительному диоду, элементу НЕ и частотомеру.
В предлагаемой системе управления информация о натяжении ременной передачи поступает за счет сравнения текущей частоты колебаний 12 упругого момента My на валу двигателя насоса с контрольной частотой Si. 12 контр., что позволяет определять отклонение натяжения и жесткости ремен0 ной передачи от требуемой и при необходимости устанавливать необходимое натяжение ременной передачи.
При работе бурового насоса возникают колебания упругого момента Му и на выходе
5 дифференцирующего звена образуется синусоидальный сигнал, частота колебаний которого соответствует частоте колебаний привода насоса. Выпрямительный диод отсе0 кает отрицательную полуволну этого сигнала, а элемент НЕ формирует прямоугольные импульсы, которые поступают на частотомер. Показания-частотомера соответствуют текущей частоте колебаний привода и косвенно
5 указывают на состояние натяжения ременной передачи.
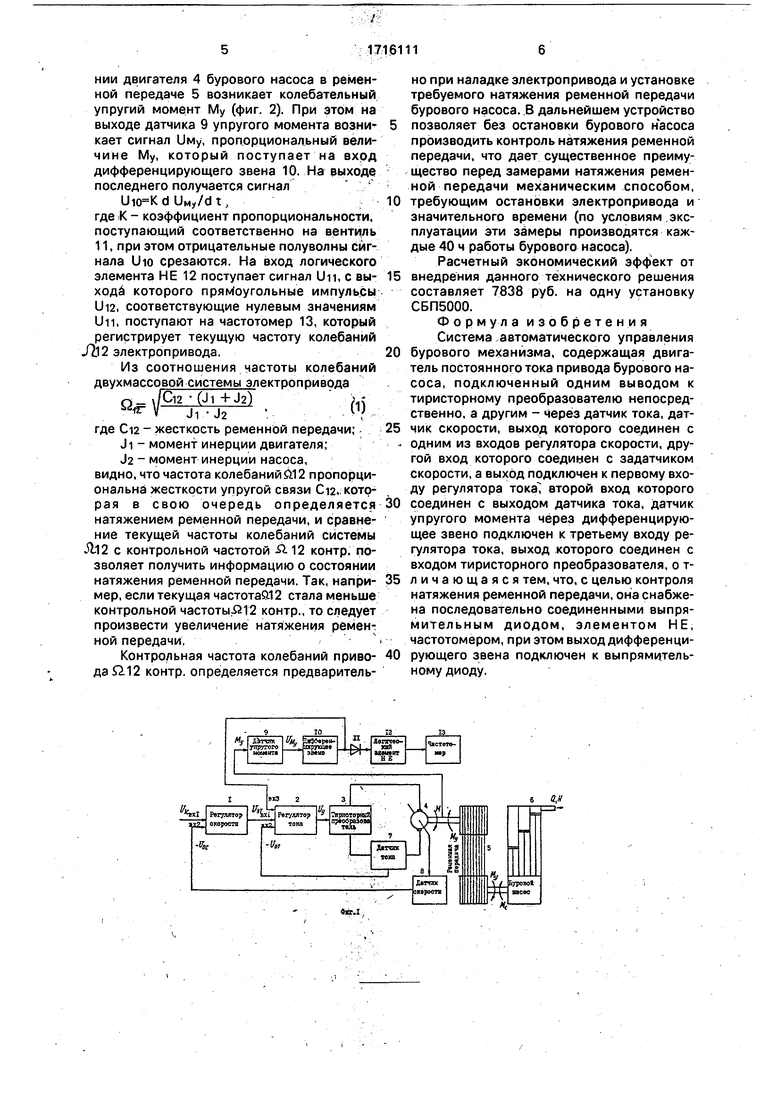
На фиг. 1 показана блок-схема системы управления; на фиг. 2 - диаграмма работы элементов системы.
0 Система автоматического управления бурового механизма содержит регулятор 1 , скорости, выходом связанный с первым входом регулятора 2 тока, выход которого подсоединен к тиристорному преобразователю
5 3, подключенному к двигателю 4 с ременной передачей 5 и буровым насосом 6. Датчик 7 тока одним входом связан с тиристорным преобразователем 3. Датчик 8 скорости подключен к второму входу регулятора 1 скоро0 сти. Датчик 9 упругого момента подключен , соответственно через дифференцирующее звено 10, вентиль 11 и логический элемент 12 к частотомеру 13. Выход дифференцирующего звена 10 подключен к третьему входу
5 регулятора 1 тока.
Элементы 1,2,9 и 10 выполнены на базе операционных усилителей серии микросхем К553УД2, элементы 7 и 8- на базе серийных датчиков УБСР-АИ, элемент 13 - на базе
0 серийных частотомеров низкой частоты.
Система работает следующим образом. При подаче Узе на регулятор 1 скорости двигатель 4 бурового насоса начинает вращаться. Ограничение по моменту М на валу
5 двигателя 4 осуществляется отрицательным сигналом - UOT,поступающим с датчика 7 тока на второй вход регулятора 2 тока, а ограничение скорости вращения двигателя 4 осуществляется отрицательным сигналом -Doc, поступающим с датчика 8 скорости на второй вход регулятора 1 скорости. При вращении двигателя 4 бурового насоса в ременной передаче 5 возникает колебательный упругий момент Му (фиг. 2). При этом на выходе датчика 9 упругого момента возни 5 кает сигнал Уму, пропорциональный величине Му, который поступает на вход дифференцирующего звена 10. На выходе последнего получается сигнал / ;
Uio KdUMy/dt,10
где К - коэффициент пропорциональности, поступающий соответственно на вентиль 11, при этом отрицательные полуволны сигнала Uю срезаются. На вход логического элемента НЕ 12 поступает сигнал Un, с вы- 15 хода которого прямоугольные импульсы Ui2, соответствующие нулевым значениям Un, поступают на частотомер 13, который регистрирует текущую частоту колебаний 7.12 электропривода.20
Из соотношения частоты колебаний двухмассовой системы электропривода
Q 1/C12-(J1+J7T X.V
V (1
где Ci2 - жесткость ременной передачи; - . 25
Ji - момент инерции двигателя;J2 - момент инерции насоса, видно, что частота колебанийй.12 пропорциональна жесткости упругой связи Ci2,, которая в свою очередь определяется 30 натяжением ременной передачи, и сравнение текущей частоты колебаний системы .12 с контрольной частотой Л 12 контр, позволяет получить информацию о состоянии натяжения ременной передачи. Так, напри- 35 мер, если текущая частотам 2 стала меньше контрольной частотыЛТ2 контр., то следует произвести увеличение натяжения ременной передачи,V .
Контрольная частота колебаний приво- 40 дэШ2 контр, определяется предварительно при наладке электропривода и установке требуемого натяжения ременной передачи бурового насоса. .В дальнейшем устройство позволяет без остановки бурового насоса производить контроль натяжения ременной передачи, что дает существенное преимущество перед замерами натяжения ременной передачи механическим способом, требующим остановки электропривода и значительного времени (по условиям .эксплуатации эти замеры производятся каждые 40 ч работы бурового насоса).
Расчетный экономический эффект от внедрения данного технического решения составляет 7838 руб. на одну установку СБП5000.
Формула изобретения Система автоматического управления бурового механизма, содержащая двигатель постоянного тока привода бурового насоса, подключенный одним выводом к тиристорному преобразователю непосредственно, а другим - через датчик тока, датчик скорости, выход которого соединен с одним из входов регулятора скорости, другой вход которого соединен с задатчиком скорости, а выход подключен к первому входу регулятора тока второй вход которого соединен с выходом датчика тока, датчик упругого момента через дифференцирующее звено подключен к третьему входу регулятора тока, выход которого соединен с входом тиристорного преобразователя, о т- личающаяся тем, что, с целью контроля натяжения ременной передачи, она снабжена последовательно соединенными выпрямительным диодом, элементом НЕ, частотомером, при этом выход дифференцирующего звена подключен к выпрямительному диоду.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления электроприводом лебедки буровой установки | 1988 |
|
SU1566012A1 |
| Система автоматического управления бурового механизма | 1986 |
|
SU1332004A1 |
| Устройство для управления редукторным электроприводом | 1972 |
|
SU585583A1 |
| Электропривод вращательного станка геологоразведочного бурения | 1989 |
|
SU1696685A1 |
| Двухдвигательный электропривод намоточной машины | 1981 |
|
SU964944A1 |
| Управляемый электропривод | 1980 |
|
SU1034016A1 |
| Устройство управления электроприводом регулятора подачи долота | 1987 |
|
SU1452944A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Способ уменьшения ударов в кинематической линии клети прокатного стана и устройство для его осуществления | 1990 |
|
SU1819167A3 |

Изобретение относится к регулируемым электроприводам содержащим упругие механические передачи, работающим со значительными нагрузками и обеспечивающим контроль натяжения этих упругих передач. Цель изобретения - контроль натяжения ременной передачи. Устройство содержит датчики скорости, тока и упругого момента, имеющие связь с регуляторами скорости и тока, последний подключен через тиристор- ный преобразователь к двигателю постоянного тока привода бурового насоса. Указанные элементы осуществляют управление буровым . механизмом, а контроль натяжения ременной передачи осуществляют последовательно соединенные выпрямительный диод, элемент НЕ и частотомер. При работе бурового насоса возникают колебания упругого момента и на выходе дифференцирующего звена образуется синусоидальный сигнал, частота колебаний которого соответствует частоте колебаний привода насоса. Выпрямительный диод отсекает отрицательную полуволну этого сигнала, а элемент НЕ формирует прямоугольные импульсы, которые поступают на частотомер. Показания частотомера соответствуют текущей частоте колебаний привода и косвенно указывают на состояние натяжения ременной передачи. 2 ил. -г Ё | (Ј
ft
в в,
ft
I
Буровой
и
V«
фиг.2
| Многоцилиндровый объемный водомер двойного действия с вращающимися цилиндрами | 1923 |
|
SU909A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| , Авторское свидетельство СССР Ms 1332004, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| . | |||
