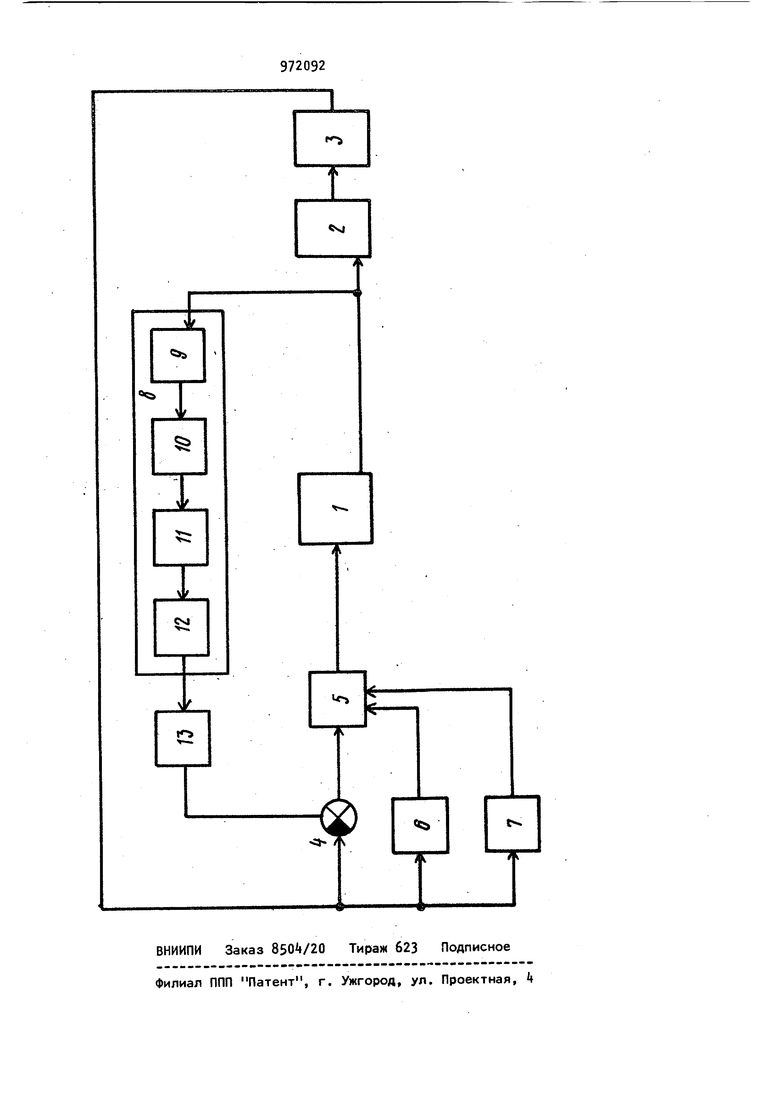
Изобретение относится к горной промышленности, а именно к автомати зации управления горными машинами, и может быть использовано для автоматического забуривания горных машин в частности буровых машин, бурильных установок и очистных комбайнов. Известен способ управления горной машиной, основанный на контроле забуривания по расстоянию, и реализующее его устройство, в котором управление режимом работы горной машины осуществляется при достижении исполнительным органом заданной глубины забурива-: ния 1 . Необходимая глубина забуривания зависит от крепости массива .которая меняется в процессе работы горной машины , Это вызывает необходимость коррекции заданной глубины забуривания, что осуществляется в известном устройстве вручную. Отмеченный недостаток снижает надежность забуривания, так как она становится зависимой от квалификации машиниста, а затраты времени на перенастройку аппаратуры снижают производительность горной машины. Известен также способ управления горной машиной по отклонению фактической нагрузки от заданной номинальной уставки нагрузки, включающий уменьшение коэффициента усиления регулятора нагрузки при подводе горной машины к забою, внедрении в массив и забуривании исполнительного органа и увеличение коэффициента усиления регулятора до максимальной величины после окончания забуривания. Указанный способ реализован в устройстве, содержащем регулятор нагрузки, датчики и задатчик нагрузки, элемент сравнения, блок коррекции коэффициента усиления. В этом известном устройстве при запуске бурильной машины включается реле времени, которое уменьшает коэффициент усиления импульсного регулятора для подвода и забуривания горной машины. По истечении заданного време ни реле времени посылает сигнал на увеличение коэффициента усиления импульсного регулятора С2 . Необходимое время забуривания зависит от абразивности и крепости массива, исходного состояния режущего инструмента и пр. Поэтому установить соответствие необходимого и заданного времени практически не уда ется. Если заданное время забуривания больше необходимого, происходит потеря времени при забуривании, если же меньше - забуривание не произойде что может явиться причиной поломки инструмента. В известном устройстве отсутствует также информация о забуривании бурильной машины в течение заданного времени забуривания, что м жет привести к увеличению коэффициен та усиления импульсного регулятора, минуя -забуривание, и явится причиной поломки инструмента при ударе его о забой на максимальной скорости подач Подвод и забуривание с одним и тем же коэффициентом усиления импульсного регулятора увеличивает время забу ривания, что снижает производительность горной машины. Цель изобретения - повышение надежности управления горной машиной путем уменьшения динамических нагрузок и увеличение быстродействия. Поставленная цель достигается тем что согласно способу управления пере подводом горной машины к забою задаю уставку нагрузки равной 0,,0 номинальной нагрузки и устанавливают нулевой коэффициент усиления регулятора, после внедрения исполнительного органа в массив и по достижении нагрузкой значения, равного 0,,5 номинальной нагрузки, коэффициент уси ления регулятора увеличивают до 0-5 от его максимального значения, а по достижении нагрузкой значения, равно го 0, номинальной нагрузки, коэффициент усиления регулятора увеличивают до его максимальной величины. и при стабилизации фактической нагруз ки увеличивают уставку нагрузки до заданной номинальной. Устройство, реализующее способ управления, снабжено двумя пороговыми элементами и датчиком стабилизации нагрузки, причем входы пороговых элементов подключены к датчику нагруз ки, а их выходы - к входам блока коррекции коэффициента усиления, вход датчика стабилизации нагрузки соединен с выходом регулятора нагрузки, а выход датчика стабилизации нагрузки с задатчиком нагрузки. При этом датчик стабилизации нагрузки выполнен в виде последовательно соединенных триггера, дифференцирующего звена, выпрямителя, и фильтра низких частот. На чертеже представлена блок-схема устройства управления горной машиной. Устройство содержит регулятор 1 нагрузки, горную машину 2, датчик 3 нагрузки, выходной сигнал которого соответствует уровню нагрузки горной машины 2, а выход датчика нагрузки соединен с элементом А сравнения. Выход элемента 4 сравнения соединен с входом блока 5 коррекции коэффициен та усиления. Выход датчика 3 нагрузки соединен с входами первого 6 и второго 7 пороговых элементов, настроенных соответственно на 0,3-0,5 и 0,7-1,0 номинальной нагрузки забуривания горной машины 2, а выходы пороговых элементов 6 и 7 соединены с входами блока 5 коррекции коэффициента усиления. Выход регулятора 1 нагрузки соединен с входом датчика 8 стабилизации нагрузки, который содержит последовательно соединенныетриггер 9, дифференцирующее звено 10, выпрямитель 11 и фильтр 12 низких частот, выход фильтра 12 низких частот соединен с входом задатчика 13 нагрузки, выполненного, например, в виде порогового элемента, а выход задатчика 13 присоединен к элементу А сравнения. Устройство реализует способ управления следующим образом. При работе горной машины 2 вхолостую с датчика 3 нагрузки поступает низкий уровень сигнала: пороговый элемент 6 посылает сигнал на .блок 5 коррекции коэффициента усиления на уменьшение до нуля коэффициента усиления регулятора 1 нагрузки, а задатчик 13 нагрузки устанавливает уставку, равную 0,,0 номинальной рабочей нагрузки горной машины 2. После внедрения исполнительного органа горной машины 2 в массив нагрузка увеличивается, и при достижении максимальной нагрузки забуривания, соответствующей 0,3-0,5 номинальной, срабатывает пороговый эле- мент 6, который посылает сигнал на увеличение коэффициента усиления в блок 5 коррекции коэффициента усиления, где коэффициент усиления регулятора 1 нагрузки устанавли-вается равным kQ-SQ% его максимального значения. Увеличение коэффициента усиле ния регулятора 1 нагрузки приводит к увеличению скорости забуривания, чт вызывает дальнейший рост нагрузки го ной машины 2, и при ее достижении вел. 1ИНЫ 0,7-1,0 от номинальной срабатывает второй пороговый элемент 7, который посылает сигнал на блок 5 коррекции коэффициента усиления для увеличения коэффициента усиления регулятора 1 нагрузки до максимального соответствующего режиму бурения. Установление факта стабилизации нагрузки на заданном для забуривания уровне производится по характеру выходных сигналов регулятора 1 нагрузки. Если нагрузка стабилизируется, то на выходе регулятора 1 нагрузки появляются сигналы сброса-наброса на грузки (знакопеременные сигналы)у если же стабилизация не произо 11ла, то на выходе регулятора нагрузки пре обладают сигналы одного знака. Пока нагрузка горной машины 2 не достигла максимального уровня забуривания на выходе регулятора 1 нагрузки следуют импульсы наброса нагрузки при забури вании, т. е. одного знака если же нагрузка достигла максимальной величины, то при нормальном процессе забуривания она стабилизируется на-заданном уровне. Характерной особенностью стабилиз ции нагрузки является наличие на выходе регулятора 1 нагрузки знакопере менных импульсов. Эти импульсы переключают триггер 9, на выходе которог появляются импульсы в той же последо вательности, в какой следуют знакопе ременные импульсы на выходе регулято ра1 нагрузки. Импульсные сигналы с триггера 9 проходят дифференцирующее звено 10 и через выпрямитель 11 пост пают на фильтр 12 низких частот, где происходит их накопление. Г1ри достижении определенной величины выходного сигнала фильтра 12 низких частот задатчика 13 нагрузки на элемент k сравнения задается уставка, соответ ствующая рабочей нагрузке бурения. При заклинивании исполнительного органа горной машины или по другой причине перегрузки на выходе регулятора 1 нагрузки будут следовать импульсы сброса нагрузки. При этом задатчик 13 нагрузки не произведет увеличения установки и она остается равной 0,7-1,0 номинальной нагрузки забуривания, так как в этом случае ,на выходе датчика 8 стабилизации нагрузки уровень сигнала будет недостаточен для срабатывания задатчика 13 нагрузки. Достигается это следующим образом. При появлении однонаправленных сигналов на выходе регулятора 1 нагрузки триггер 9 переводится в какоето определенное состояниеи на его выходе устанавливается сигнал постоянного тока, который не проходит через дифференцирующее звено 10. Использование предлагаемых способа и устройства управления горной машиной предотвращает удары ее исполнительного органа о забой при подводе и внедрении в массив, что достигается уменьшением коэффициента усиления регулятора нагрузки до нуля. Этим предотвращаются поломки режущего инструмента и обеспечивается безопасность ведения работ. Также сокращается время забуривания исполнительного органа горной машины благодаря увеличению коэффициента усиления регулятора нагрузки при забуривании. Надежность управления машиной обеспечивается своевременным увеличением коэффициента усиления регулятора наг грузки с помощью пороговых элементов и, как следствие, это приводит к увеличению бьютродействия устройства управления при возникновении заштыбовок и ударов исполнительного органа о забой. Этой же цели служит плавное увеличение нагрузки при забуривании путем увеличения коэффициента усиления регулятора нагрузки от нуля на +0-50 при срабатывании первого порогового элемента и до максимального после срабатывания второго порогового элемента, что позволяет уменьшить динамические нагрузки при переходе горной машины от забуривания к бурению и повысить ее долговечность. Для буровых машин направленность бурения зависит от забуривания. Улучшение режима забуривания улучшает условия для направленного бурения. Это достигается за счет того, что при забуривании осевая нагрузка на буровую штангу не превышает критическую и буровая штанга остается прямолинейной, а увеличение нагрузки для бурения производится после определения момента стабилизации нагрузки забуривания на заданном уро не с помощью датчика стабилизации на грузки, когда, как показывают расчеты, нагрузка может быть увеличена в 16 раз по сравнению с начальной на грузкой при подводе исполнительного органа к забою. Формула изобретения 1. Способ управления горной машиной по отклонению фактической нагрузки от заданной установки нагрузки, включающий уменьшение коэффициен та усиления регулятора нагрузки при подводе горной машины к забою, йнедрении в массив и забуривании исполнительного органа и увеличение коэффициента усиления регулятора до максимальной величины после окончания забуривания, о т л и ч а ю, щ и и с тем, что, с целью повышения надежнос ти управления горной машиной путем уменьшения динамических нагрузок и увеличения быстродействия, перед под водом горной машины к забою задают уставку нагрузки равной 0,7-1,0 номинальной нагрузки и устанавливают нулевой коэффициент усиления регулятора, послеьвнедрения исполнительног органа в массив и по достижении нагрузкой значения, равного 0, номинальной нагру|зки, коэффициент ус ления регулятора увеличивают до kO50% от его максимального значения, а по достижении нагрузкой значения, равного 0, номинальной нагрузки коэффициент усиления регулятора увеличивают до его максимальной величины, и при стабилизации фактической нагрузки увеличивают уставку нагрузки до заданной номинальной. 2.Устройство управления горной машиной, содержащее регулятор нагрузки, датчик и задатчик нагрузки, элемент сравнения, блок коррекции коэффициента усиления, отличающееся тем, что, оно снабжено двумя пороговыми элементами и датчиком стабилизации нагрузки, причем входы пороговых элементов подключены к датчику нагрузки, .а их выходы - к входам блока коррекции коэффициента усиления, вход датчика стабилизации нагрузки соединен с выходом регулятора нагрузки, а выход датчика стабилизации нагрузки - с задатчиком нагрузки. 3.Устройство по п. 2, отличающееся тем, что-датчик стабилизации нагрузки выполнен в виде последовательно соединенных триггера, дифференцирующего звена, выпрямителя и фильтра низких частот. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР U85218, кл. Е 21 С 11/02, 197. 2.Блок автоматическогЬ управления БАР для электровращательных бурильных ашин БУЭ-1М. Техническое описание и инструкция по эксплуатации БАР 00.000 ИЭ, Донецк, Донавтоматгормаш, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Способ управления горной машиной и устройство для его осуществления | 1983 |
|
SU1105640A1 |
| Способ управления нагрузкой горной машины и устройство для его осуществления | 1989 |
|
SU1707199A1 |
| Регулятор нагрузки горной машины | 1974 |
|
SU581270A1 |
| Устройство управления горной машиной | 1987 |
|
SU1476125A1 |
| Система автоматического регулирования осевой нагрузки частоты вращения | 1990 |
|
SU1719122A1 |
| Способ управления буровым агрегатом и устройство для его осуществления | 1988 |
|
SU1629508A1 |
| Система автоматического управления процессом бурения | 1987 |
|
SU1479632A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ САХАРОВА А.В. | 1992 |
|
RU2021499C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |