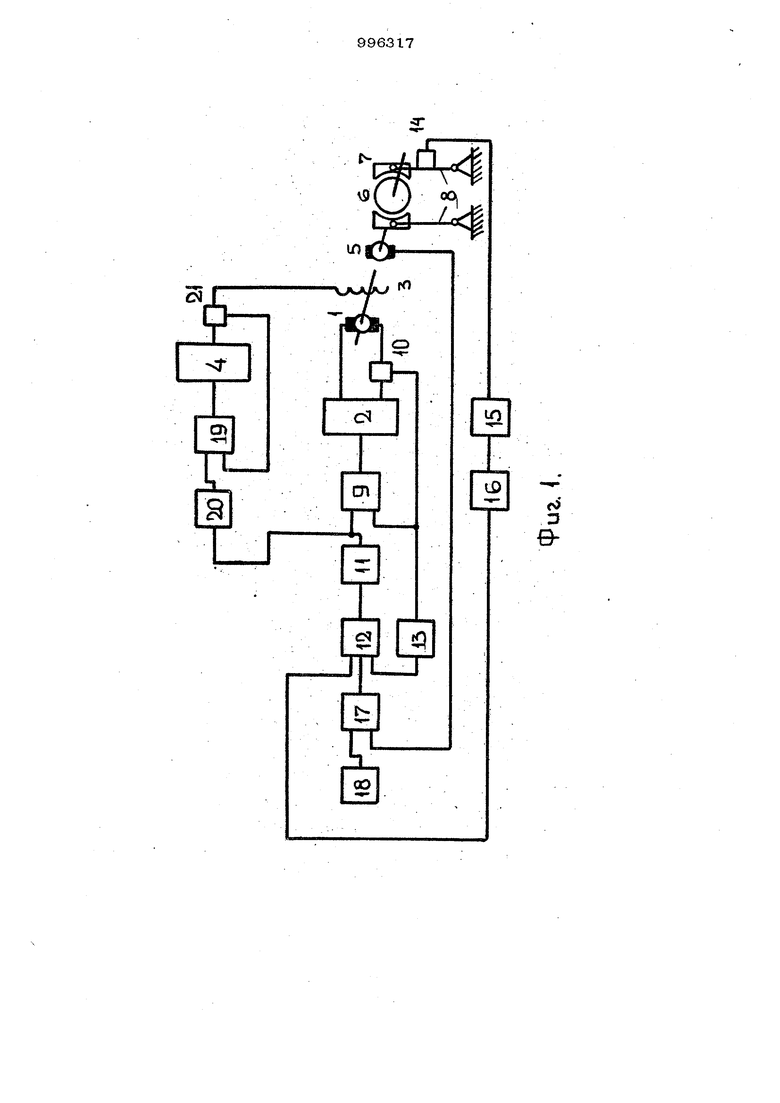
Изобретение огносигся к элекгрогехнике и можег быть использовано в приводе посгоянного гока. По основному авг. св. N 89378О извесген электропривод подъемной машины, содержащий двигатель постоянного тока независимого возбуждения, якорь которого подключен к нереверсивному вен тильному преобразователю, в канал управ ления которого включен блок регулирования тока, а обмотка возбуждения дтвигателя соединена с реверсивным вентильным преобразователей, управляющий вход которого подключен к выходу блока регу лирования тока возбуждения, вход обратной связи которого соединен с датчиком тока возбуждения, коммутатор и блок регулирования скорости, вход обратной связи которого соединен с датчиком скорости, а другой вход соединен с блоком заДания скорости, блок регулирования провЕЗ водной тока, блок выделения модуля и согласующий усилитель, причем выход блока регулирования скорости соедини с задающим входом блока регулирования производной тока, выход которого подключен, к блоку регулирования тока через блок выделения модуля, а к блоку регулирования тока возбуждения - черед согласующий; усилитель, а вход обратной связи блока регулирования проювоДной тока соединен с датчиком тока через коммутатор, управляющий вход которого подсоединен к выходу блока регулирования производной тока, Недос та ток известного электропривода заключается в следующем. В начальный период пуске дшпгателя,; в момент растормаживания машины, под действием активного статического Момента происходит движение всей подъемной установки в соответствии с направлением действия статического момента. Если выбранное направление движения не совпадает с направление действия статического момента, то происходит явление обратного хода устаноэки. Если требуемое направл ше движения совпадает с направлеиием действия стагического момента, то пронсходиг бесконтрольный разгон подъемной машины. Таким образом, начальный период движения установки характеризуется как неуправляемый. Это явление .объясняется следующим образом Приводная система с реверсом развиваемого момента в цепи обмотки воабуаодения обладает повышенной инерцион ностькГпо отношению к воздействию у правляющего сигнала. Это приводит Jfj тому, что при растормаживании подъемной устйновки статический момент мгновенно пршследывается к органу навивки (до растормаживания он уравновешивался тормозом машин ы), а момент,развиваемый двигателем,нарастает в соответстви с быстродействием контура возбуждения и тока якоря двигателя. Целью изобретения является повышение производительности подъемной установки. Поставленная цель достигается те что в известный электропривод подъемной машины дополнительно введены датчик величины усилия уравновешивающего статический момент, . усилительный блок и релейный элемент, причем выход датчика величины усилия,уравновешиваю щего статический момент соединен с релейным элементом через усилительный блок, а выход релейного элемента подключен ко входу блока регулирования производной тока, В данном электроприводе неуправляемое время движения подъемной машины в момент ее растормаживания устраняет ся. Это достигается тем, что при затор мохсенной машине привод развивает момент, полностью уравновешивающий акти ный статический момент. Величина, пропорциональная активному статическому моменту, измеряется датчиком величины усилия. уравновешивающего статический момент, масштабируется усилительным устройством в соответствии с сигналами, действующими в системе управ ления, и релейный элемент подает ся на вход отрицательной обратной связи блока регулирования производной ток Так как при заторможенной машине на задающий вход блока регулирования водной тока не поступает сигиал с выхо да блока регулирования скрросги (нулевое задание), то при наличии на входе блока регулирования производвой тока сигнала отрицательной обрагной связи, величина которого пропорциональна статическому моменту, контур регулирован производной тока отрабатьюает нулевой задающий сигнал, что приводит к появлению момента двигателя при заторможенной машине, который полностью уравновешивает активный статический момент. Для устранения дополнительного потребления .электроэнергии при заторможенной подъемной машине релейный элемент подключает усилительный блок ко входу блока регулирования производной I тока, несколько упреждая момент растормаживания подъемной машины. Время упреждения релейного элемента определяется быстродействием контура регулирования производной тока. Для устранения влияния дополнительной обратной связи на динамику регулирования системы управления релейный- элемент размыкается одновременно с растормаживанием машины. . . На фиг. I изображена функциональная схема одного из возможньтх вариантов выполнения электропривода; на фиг. 2 - тахограмма подъема электропривода, а на фиг. 3 - кривые изменения скорости двигателя, развиваемого двигателем момента и статического момента. Якорь двигателя постоянного тока I 1фиг. I) включен на нереверсивный вентильный преобразователь 2, обмотка возбуждения 3 которого питается от реверсивного вентильного преобразователя 4, С валом двигателя соединены тахогенератор 5 и орган навивки подъемной машины 6. Подъемная машина тормозится колодками 7, которые соединены с фундаментом тягами 8, Блок регулирования тока 9 включен на вход преобразователя 2, вход блока 9 соединен с датчиком тока 10 и блоком 11 выделения модуля. Вход блока 11 соединен с выходом блока 12 регулирования производной тока, вход которого соединен с датчиком Ю тока через коммутатор 13, с датчиком 14 величины усилия уравновешивающего статический момент (усилие измеряется в тяге 8), через усилительный блок 15 и релейный элемент 16, с блоком 17 регулирования скоросги. Вход блока 17 соецшея с блоком 18 задания скорости и тахогенератором 5. Задакшщй вход преобразователя 4 соединен с выходом блока 19 регулирования тока возбуждейия, вход которого соединен с выходом блока 11 через согласующий усилитель 2О и от датчика 21 тока возбуждения.
Система работает следукнцим образом. На заторможенной подъемной машине величину статического момента полностью ураввовешиванЯ усилия, возникакдцие в тягах 8, Эти усилия измеряются датчиком 14Г 5 Упреждая момент растормаживания машины замыкается релейный элемент 16, подсоединяя ко. входу обратной связи блока 12 регулирования производной тока сигнал ,пропорциональнь|й статическому МО- 0 |Менту.Время упреждензяя определяется бьют родействием контураУрегулирования производной тока. После окончания перехоходного процесса привод при заторможенной машине полностью уравновешивает- 5 Iстатический момент Полное уравновешивание статического гломента происходит потому, что блок 12 регулирования производной тока имеет интегральную динамическую характеристику и при ну- 20 левом задании на его входе контур регулирования производной якорнсиго тока устанавливает величины тока возбуждения и якорного тока такими, при которых заданное и действительное значения входньтх 25 сигналов на блоке 12 регулирования производной тока не cpaiвняютcя,Taк как на вход блока 12 регулирования происзводной Тойапоступает нулевое значение по каналу задания,то переходный проаессзакончйтся 30 i после того как усилие в тормозной тяге не станет нулевым.Это означаёт.что система будет находиться в уравновешенном состоя-НИИ, го есть момент,развиваемый двига- . телем,полностью уравновесит статичес- 35 кий момент. После растормаживания двигателя и нарастания вэпсодного сигнала блока 17 регулирования скорости размыкается релейный элемент 16 и происходит разгон приводной системы без явле- до ния обратного хода машины.
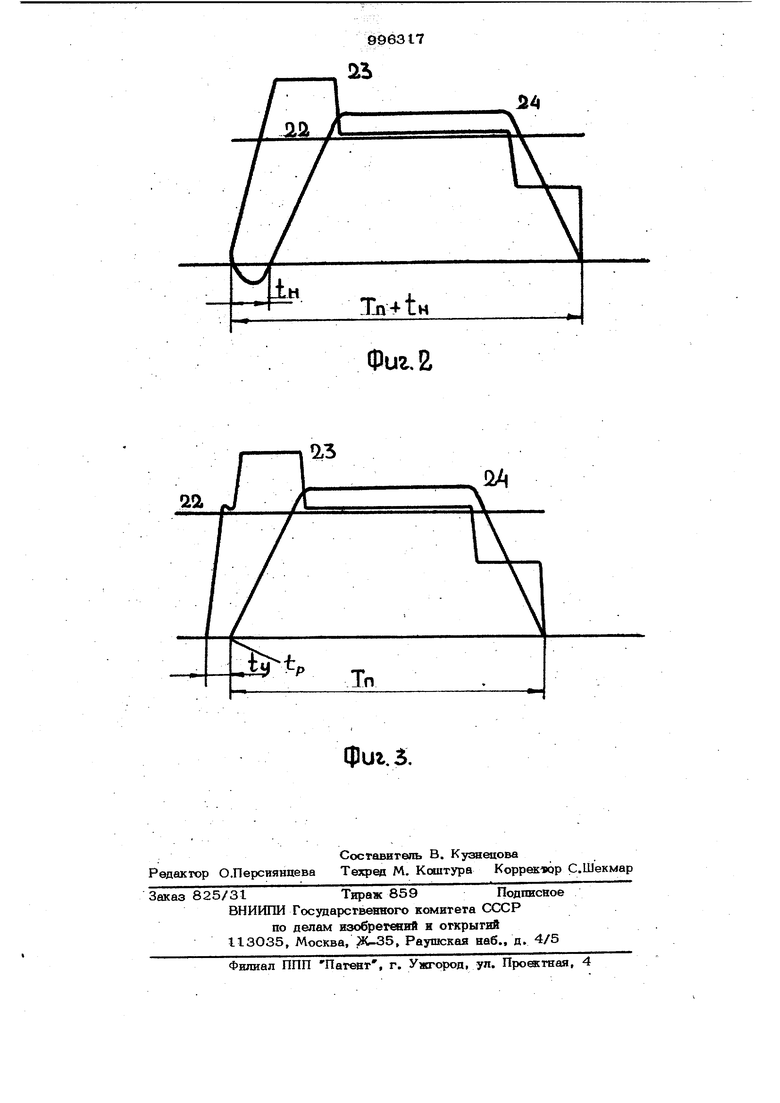
Такое построение системы управления . выгодно отличает данный электропривод постоянного тока от известного электропривода. Если в известном электроприво-, 45 де после растормаживания машины {фиг. на вал двигателя, действует статичес- , кий момент 22, и при плавн ял нарастании крутящего момента 23, развиваемого
17.6
приводной системой, наблюдается явление обратного хода машины, т. е. кривая 24 частоты вращения двигателя изменяе знак до момента времени :ЬцЭТо, в конечном счете, приводит к увеличению времени цикла подъема Tfj на -Ьц. В данном электроприводе (фиг. 3 перед растормажив.анием машины за время упреждения i замыкае1ч::я релейный элемент, что в Конпе переходного пропесса приводит к полному равновешиванню статического активного момента снстет 4ой 1фивода. В момент времени t р одновршгенно с растормаживанием машины размыкается релейный элемент. Уравновешивание статического момента на заторможенной машине приводит к устранению явления обратного хода (неуправляемости машины) и в конечном счете приводит к ук еньшению цикла подъема на время неуправляемости. Данный электропривод подъемной машины обладает технико-экономической эффективностью по сравнению с известной системой элек1ропривода. Эффективность достигается за счет уменьшения временя цикла подъема, что приводит к повьпшению производительности всей подъемной установки.,
Формула изобретения
Электропривод подъемной машины по авт. св. №893780, о т л и ч а ю- щ и и с я тем, что, с селью повышения производительности подъемной установки, в него введены датчик величины усилия, уравновепгавающего статический момент, причем выход датчика величины усилия, }уравновешнваюшего статический момент, соединен с релейным элемеатом через усилительный блок, а выход релейного элемшта подключен ко входу блока регулзфования производной тока.
йсточашш информации, приятые во внимание при экспертизе
1 Авторское свидетельство СССР № 89378О, кл. Н О2 Р 5/О6, В 66 В 1/30, 198О.
zM
о)
3
ВФиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1980 |
|
SU887403A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1986 |
|
SU1324976A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1306871A2 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| Устройство для осуществления пуска подъемной машины | 1980 |
|
SU885133A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1986 |
|
SU1388377A1 |
UU
фиг. 5.
