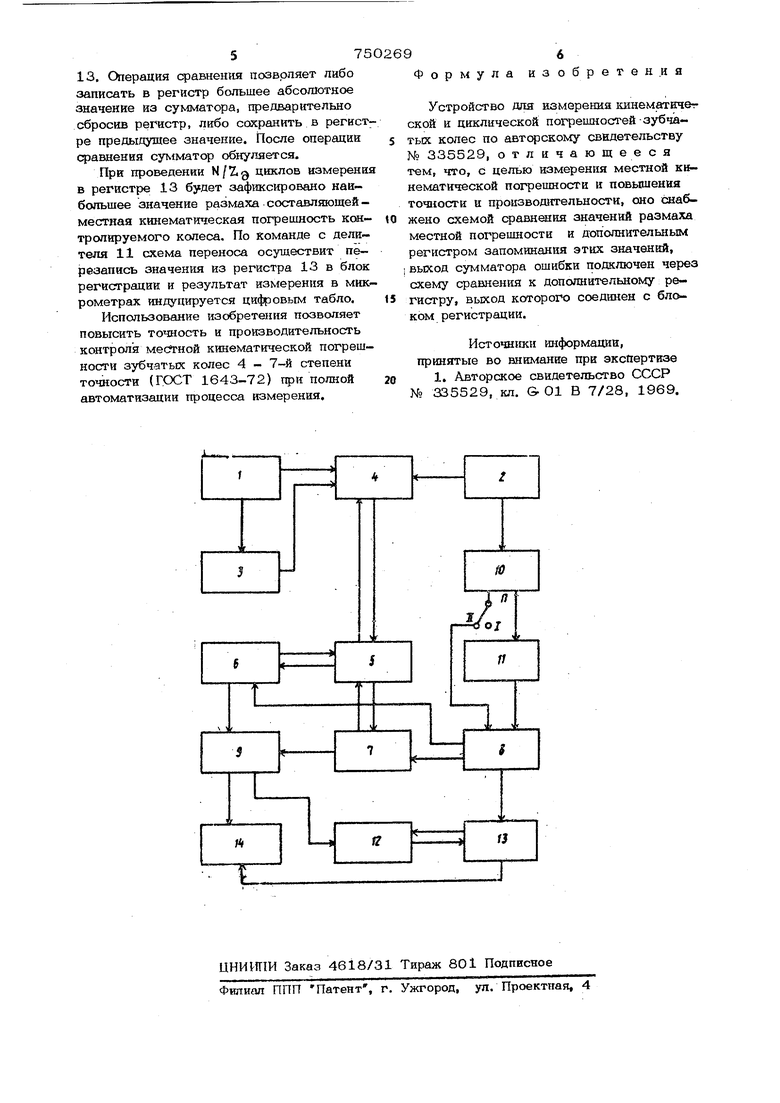
Изобретение относится к области линейно-угловых измерений, а именно к устройствам для контроля зубчатых колес. Известно устройство для измерения кинематической и циклической погрешностей зубчатых колес, содержащее однотипные преобразователи угла поворота в число-импульсный код, соосно соед1шенные с измерительным червяком и контролируемым колесом, делитель образцового передаточного отношения, фазометрический блок, схему сравнения дискретных значений погреишости., регистры запоминания текущего дискретного значения погрешности, сумматор ошибки и блок .регистрации погрешности. Вход фазометрического блока подключен к преобразователю измерительного червяка, а также к преобразователю ксжтролируемого колеса через делитель образцового передаточного отношения, выход фазометрического блсжа сое линён со входами регистров через схему сравнения, а выходы регистров подключены ко входу сумматора ошибки, выход ко торого соединен с блоком регистрации погрешности - цифровым табло ll . Однако это устройство не позволяет измерить местную кинематическую погрешность измеряемого колеса, допуск на величину которой регламентирован стандартом. Определение же местной погрешности при расшифровке диаграммы приводит к потере точности и малопроизводительно. Целью изобретения является измерение местной кинематической погрешности и повышение точности и производительности. Это достигается тем, что устройство снабжено схемой сравнения значений размаха местной кинематической погрешности и дополнительным регистром запоминания этих значений, выход сумматсчра ошибки подключен через схему сравнения к дополнительному регистру, выход которого соединен с блоком регистрации. На чертеже представлена структурная схема устройства. Измерительный однозаходный червяк и :контролируемое колесо, соосно соединенные с одноттшыми 1треобразователями 1 н 2 угла поворота в код, находятся в зацеплении на заданном межцентровом рассго$шии и при измерении приводятся в дв жение от механизма привода (кинематиче сКая схема на чертеже не Представлена). В делителе 3 устанавливается образцовое значение передаточного отношения в виде числа, равного числу зубьев 7, кс«тролируемого колеса, Фазометрический блок 4 фиксирует очередность прихода импульсов с преобразователя 2 и делителя 3, полученньгй фазовый сдвиг - дискр ное значение кинематической погрешности (г; ). Схема сравнения 5 составляет дискрет ное значение погрешности, зарегистриро ванное блоком 4, со значением регистров 6, либо 7 (коммутация определяется очередностью прихода импульсов с преобразо ваТеля 2 и делителя 3). Схема переноса 8 позволяет записать значения, зарегистрированные в регистрах 6 и 7 в сумматор ошибки 9, где подсчитьюается значение коптролируемой погреишости. Период составляющей кинематической погрешности определяется коэффициентом пересчета Z,g делителя 10, который соединен с делителем 11, коэффициент пересчета последнего Nj.g , а их; последо вательное включение определяет полный период-оборот преобразвателя 2 контро лируемого колеса - передаточное отношение делительной пары зубообрабаты. вающего станка на ф шишной операции; N - число дискретных отсчетов за период проявления кинематической погрешности). Схема 12 сравнения значений размаха составляющих погрешностей сопоставляет содержание сумматора 9 со значением регистра 13, которьй используется в качестве промежуточной памяти. Блок регистрации 14 - цифровое табло служит для индикации результата измерения. Работа устройства осуществляется следующим образом. Перед ксжтролем осуществляется установка значений Z в делителе 3, Zg и N/Zg соответстве1шо в делителях 10 и 11. В режиме контроля кинематической погрешности Г1ереключа1 ль П установле положение 1. При включении привода Щутульс с гфеобразсжателя 2 запускает хему измерения. Импульсы с преобразователя 1 поступают в делитель 3. Числовой эквивалент дискретного значения кинематической похрешности вычисяется в фазометрическом блоке 4, где азовый сдвиг - временной интервал квантуется счетными импульсами преобразователя 1 Временной интервал определяется импульсами с преобразователя 2 и делителя 3, при переполнении последнего. Очередность прихода импульсов определяет знак дискретного значения погреишости. Стоп-импулЬс временного инетрвала служит командой операции сравнения содержания блока 4 со значением регистра 6 или 7 с помощью схемы сравнения 5, при этом выбор регистра определяется знаком дискретного значения погрешности. Операция сравнения позволяет либо записать в регистр большее абсолютное значение из фазометрического блока, предварительно сбросив регистр, либо сохранить в регистре предыдущее значение. После операции сравнения блок 4 сбрасывается. Быстродействие блоков-устройства позволяет провести все указанные операции до прихода следующего счетного импульса. Таким образом, в результате измерения в регистре 6 окажется значение max + , а в регистре 7 -шах-| , и, в кснце периода измерення, N-ый импульс с преобразователя 2,пройдя делители 10 и 11, подает команду схеме переноса 8. По этой команде схема 8 последовательно осуществляет перезапись значений из регистров 6 и 7 в сумматор 9, В сумматоре определяется значение кинематической погрешности в результате измерения индуцируется в микрометрах блоком 14. В режиме контроля местной кинематической погрешности переключатель П устанавливается в положение П и период измерения определяется импульсами с преобразователя 2. Скема переноса осуществляет запись значений max )Р j К и та К . определяемых в пределах к-го интервала кинематической погрешности, в сумматор. После очередной операции переноса регистры 6 и 7 сброшены. По команде окончания очередной операции измерения схема сравнения 12 сопоставляет значение размаха составляющей кине1чатг1ческой погрешности, вьиисленное в сумматор 9 с регистро г
13. Операция сравнения позволяет либо записать в регистр большее абсолютное значение из сумматора, предварительно сбросив регистр, либо сохранить в регистре предыдущее значение. После операции сравнения сумматор обнуляется.
При проведении N/2.Q циклов измерения в регистре 13 будет зафиксировано наибольшее значение размаха составляющей местная кинематическая погрешность контролируемого колеса. По команде с делителя 11 схема переноса осуществит пе резапись значения из регистра 13 в блок регистрации и результат измерения в микрометрах индуцируется цифровым табло.
Использование изобретения позволяет повысить точность и производительность контроля местной кинематической погрешности зубчатых колес 4 - 7-й степени точности (ГОСТ 1643-72) при полной автоматизации процесса измерения.
Формула изобретения
Устройство дла измерения кинематнчет ской и циклической погрешностей -зубчатых колес по авторскому свидетельству NO 335529, отличающееся тем, что, с целью измерения местной кинематической погрешности и повышения точности и произвошггельности, оно сиабжено схемой фавнения значений размаха местной погрешности и дополнительным регистром запоминания этих значений, выход сумматора ошибки подключен через схему сравнения к дополнительному регистру, выход которого соединен с блоком регистрации.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 335529, кл. G. 01 В 7/28, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения кинематической и циклической погрешностей зубчатых колес | 1978 |
|
SU872950A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ И ЦИКЛИЧЕСКОЙ ПОГРЕШНОСТЕЙ ЗУБЧАТЫХ КОЛЕС | 1972 |
|
SU335529A1 |
| Устройство для измерения кинематической погрешности зубчатой передачи | 1972 |
|
SU442367A1 |
| Способ измерения кинематической погрешности зубчатых передач | 1979 |
|
SU783576A1 |
| Устройство для измерения и контроля параметров аналого-цифровых преобразователей | 1981 |
|
SU1005297A1 |
| Измеритель сдвига фаз | 1986 |
|
SU1366966A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
| Установка для автоматической поверки цифровых измерительных приборов и аналого-цифровых преобразователей | 1990 |
|
SU1775692A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU383206A1 |
| Устройство для автоматической поверки электроизмерительных приборов | 1980 |
|
SU930185A1 |
i,-.
