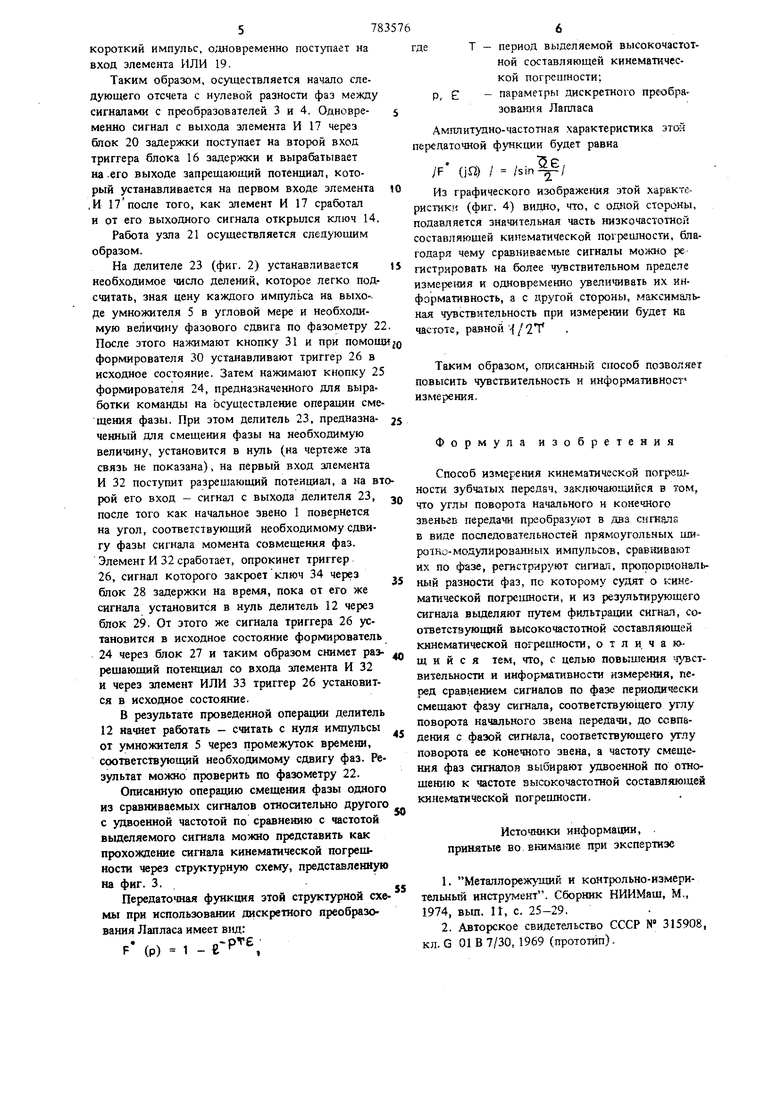
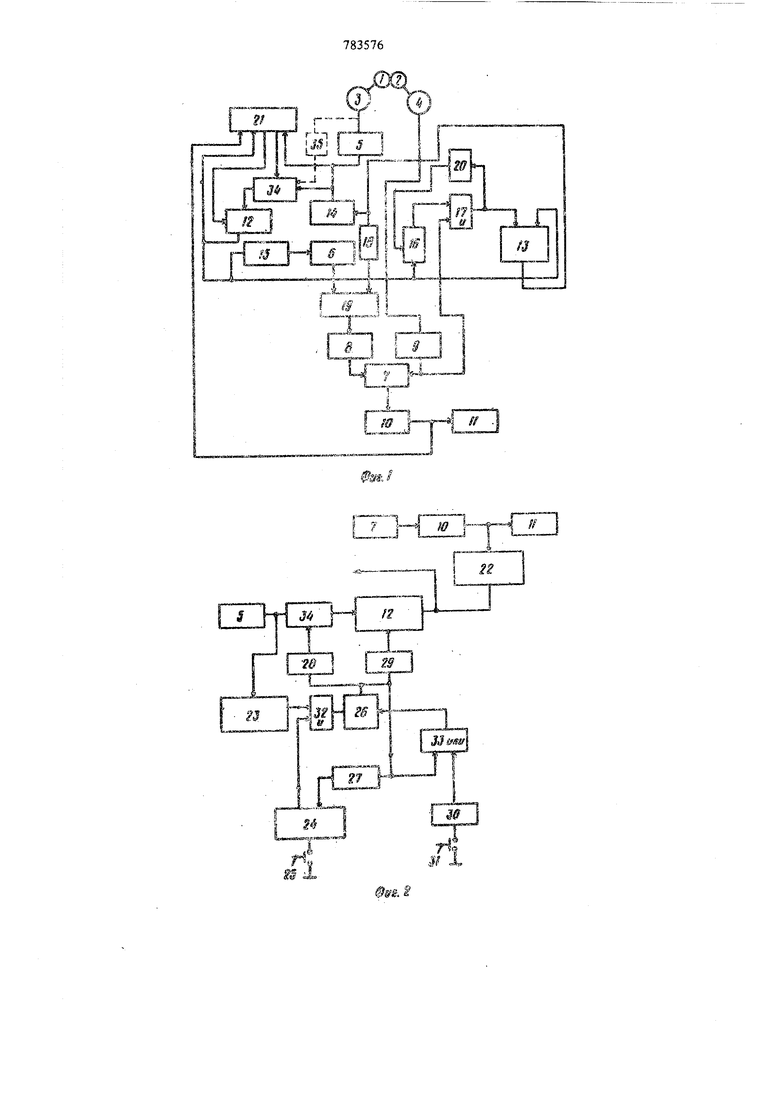
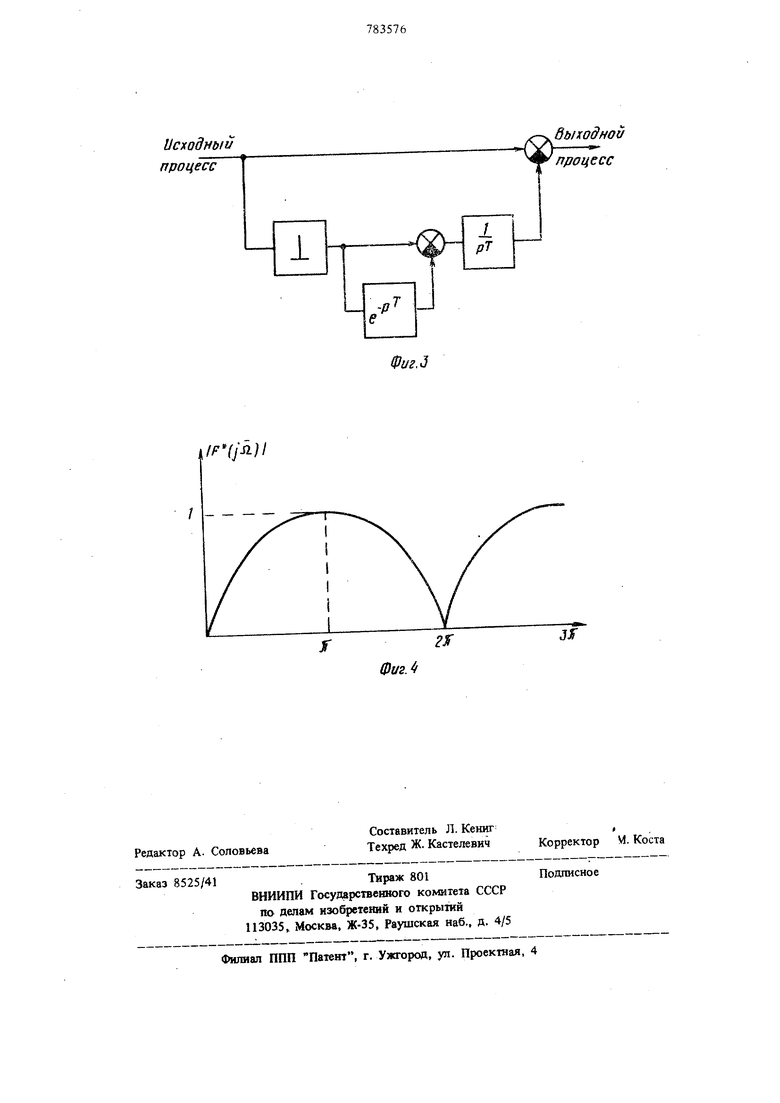
Изобретение относится к измерительной технике в машиностроении, а именно к злектронным средствам для измерения кинематической .погрешности зубчатых колес и передач. Известен способ измерения кинематической погрешности зубчатых колес и передач, основан ный на о кинематической погрешности судят по рассогласованию сигналов, соответ тву ющих углам поворота начального и звеньев передач 1. Однако известный способ не обеспечивает точного измерения высокочастотных составляющих кинематической погрешности. Наиболее близок по технической сущности и достигаемому результату к изобретению способ измерения кинематической погрешности зубчатых передач, заключающийся в том, чта углы поворота начального и конечного звеньев передачи преобразуют в два сигнала в виде последовательностей прямоугольных широтно-модулированных импульсов, сравнивают их по фв эе, регистрируют сигнал, пропорцконалы1ый разности фаз, по которому судят о кинематической погреишости, и из результирующего снгшла выделяют путем фильтрации сигнал, соответствующий высокочастотной составляющей кинематической погрешности, ;изменяя прт зтом ю пярность одной из последовательностей Прямоугольных импульсов, заполняя ннтервалы между прямоугольнымн импульсами обеих последовательностей высокочастотными импульсами, частоту следования которых вы&1рают значительно большей частоты следования прямоугольных импульсов и верхней частоты полосы 1фопускания регистрирующего .блока, суммируя разнополярные последовательности импульсов н регистрируя сигналы, пропорциональные результатам суммирования 2. Недостатком этого способа явпяпся огршиченная чувствительность и информативность измерения, вызванная тем, -qrro сравниваемые по фазе (жгналы соответствуют всей величине кинематической погрешности. Цель изобретения - повышение чувствительности в информативности измерения. Это достигается тем, что перед сравнением сигналов по фазе периодически смещай)Т фазу сигнала, соответствующего углу поворота йа37чального звена передачи, до совпадения с фазой сигнала, соответствующего углу поворота ее конечного звена, а частоту смещения фаз сигналов выбирают удвоенной по отношению к час тоге высокочастотной составляющей кинемз,тической погрешности. На фиг. 1 изображена &IOK-схема устройства; на фиг, 2 блок-схема узла смещения фазы сигнала, соответствующего углу поворота Начального звена, с частью злементов блок-схемы на фиг. 1; на фиг. 3 - структурная схема импульсной системы, в которой осуществляется смещение фазы сигнала, соответствующего углу поворота начального звена; на фиг. 4 амплитудно-частотная характеристика передатоЧ ной функции при процессе смещения фазы с удвоенной частотой. Начальное звено 1 измеряемой передачи (в данном примере выполнения - ведущее колесо с числом зубьев Zi) и ее конечное звено 2 (в данном примере выполнения - ведомое колесо с числом зубьев Zj) соосио соеди нены соответственно с преобразователялад 3 и углов поворота в последовательность прямоуго ных широтно-модулированных импульсов, Умножитель 5 предназначен для умножения числа импульсов преобразователя 3 на Z i, а делитель 6. предназначен .для деления числа км пульсов этого же преобразователя 3 на Zj. По средством такого умножения и деления прои: водится приравнивание частоты сигнала преобразователя 3 к частоте сигнала преобразователя 4. Фазометр 7 предназначен для сравнетая по фазе выходных сигналов преобразователей 3 и 4, Делители 8 и 9 регастроа масштаба предназначены для расщирения предела измерения зометра 7 за счет деления импульсных сигнало поступающих на вход фазометра 7. Блок 10 активных фильтров преднажшчек лля экспресс-анализа гармонического состава « меряемой кинематической погрепшосш. Самописец 11 предназначен для регистрацж выходного сигнала блока 10. Дез1итель 12 пред назначен для выработки на его выходе серии 1мпульсов, частота которых удвоена по отношению к частоте зьщеляемой высокочастотной составляющей кинематической погрешности. Триггер 13 предназначен для управления ключом 14, установленным в цепи умножитель 5 - делитель 6. Блок 15 задержки предназшчен для установки делителя 6 в , Блок 16 задержки, зключзнный последовательно с триггером (на чертеже не аоказан), предназначен для управления одним из входов элемента И 17, второй вход которого связан с преобразователем 4, Устройство Содержит также формирователь 18, элемент ИЛИ 19, блок 20 задержки и узел 21 смещения фазы. Узел 21 содержит (фиг, 2) фазометр 22, делитель 23, фор жрователь 24 с кнопкой 25, триггер 26. блоки 27, 28, 29 задержки, формирователь 30 с кногасой 31, элемент И 32 элемеш ИЛИ 33, С блоком 28 задержки связан ключ 34, Устройство может снабжено еще одним умножителем 3S (изображен пунктиром на фиг. 1), установленным параллельно умножителю 5, Оа требуется в случае, когда необхогщмо выделить илклическу ю погреашость, на кратную и не равн)ю зубцовой, появление которой мо;кзт быгь связано с кинематической цепью станка, на котором обрабатывались зубчатые колеса кзмйрйемой передачи. В этом случае сигнал с умиож-леля 5 на ключ 34 не поступает. Работа устройстза. Угль поворота начального и конечного зненьев 1 к 2 преобразуют при помощи преобразователей 3 и 4 в Дин электрических сигнала, ка;кдый из котсрь Х представляет собой последовательность прямоугольных иифотко-модулизованнььх импульсов, С преобразователя 3 сиг-нал поступает на умножите/.ь 5 и делитель 6, а затем сигналь с обоих преобразователей поступают ка фазометр 7, по выходаому результирующему сигналу которого, пролоризиональному раэкссж 4-3 сигналов П| ;обргзовагелей 3 и 4, мо5К1 о судить О кинематичесгсой погрешности изкеряемсй передачи. Из этого результирующего cwrHajta при помощи блоке, 10 активных фильтров выделяют Ш4кал соответствующий высокочастотной составляющей кинематической погрешности и записывают его на самописце 11. 3 соогветствии с описьшаемым способом необхо.пямо с частотой, удвоенной по отнощекию к частоте высокочастотной составляющей кинематической погрешности, прекращать измерение и начинать его с нуля Для этого с умножителя 5 сигнал поступает на делитель 12, выходной сигнаи котор го через триггер 13 поcijiiaeT на ключ 14 и закрывает его, через«, блок 15 задержки устанавливает делитель 6 3 нуль, после того как .ключ 14 разорвет цепь умножителя 5 - делитель 6, а затем поступает ш первый вход триггера блока 16 задержки и зырабатьтает аа его вьхходе разрешающий потенциал, гюст Т1ающий на вход элемента И 17, который срабатывает тогдд, когда на второй его вход поступит сигнал с преобразова.теля 4, Внходяой С11гнал элемента И 17 через Т|шггер 13 йсступает на ключ 14 н открывает его, а через форл-шрователь 18, формируюиснн от отрицательного перепада потенциала на выходе триггера 13 в MofvffiHi открызання ключа 14 57 короткий импульс, одновременно поступает на вход элемента ИЛИ 19. Таким образом, осуществляется начало еледующего отсчета с нулевой разности фаз между сигналами с преобразователей 3 и 4. Одновременно сигнал с выхода злемента И 17 через блок 20 задержки поступает на второй вход триггера блока 16 задержки и вырабатывает на .его выходе запрещающий потенциал, который устанавливается на первом входе элемента ,И 17после того, как элемент И 17 сработал н от его выходного сигнала открылся ключ 14. Работа узла 21 осуществляется следующим образом. На делителе 23 (фиг. 2) устанавливается необходимое число делений, которое легко подсчитать, зная цену каждого импульса на выхо-. ре умножителя 5 в угловой мере и необходимую величину фазового сдвига по фазометру 2 После этого нажимают кнопку 31 и при помощ формирователя 30 устанавливают триггер 26 в исходное состояние. Затем нажимают кнопку 25 формирователя 24, предназначенного для выработки команды на осуществление операции сме щения фазы. При этом делитель 23, предназначенный для смещения фазы на необходимую величину, установится в нуль (на чертеже эта связь не показана), на первый вход злемента И 32 поступит разрешающий потенциал, а на вт рой его вход - сигнал с выхода делителя 23, после того как начальное звено 1 повернется на угол, соответствующий необходимому сдвигу фазы сигнала момента совмещения фаз. Элемент И 32 сработает, опрокинет триггер 26, сигнал которого закроет ключ 34 через блок 28 задержки на время, пока от его же сигнала установится в нуль делитель 12 через блок 29. От этого же сигнала триггера 26 установится в исходное состояние формирователь 24 через блок 27 и таким образом снимет разрешающий потенциал со входа элемента И 32 и через зпемент ИЛИ 33 триггер 26 установится в исходное состояние. В результате проведенной операции делитель 12 начнет работать - считать с нуля импульсы от умножителя 5 через промежуток времени, соответствующий необходимому сдвигу фаз. Результат можно проверить по фазометру 22. Описанную операцию смещения фазы одного из сравниваемых сигналов относителино другого с удвоенной частотой по сравнению с частотой выделяемого сигнала можно представить как прохождение сигнала кинематической погрешности через структурную схему, представленную на фиг. 3. Передаточная функция зтой структурной схе мы при использовании дискретного преобразования Лапласа имеет вид: F (р) 1 - -Р гдеТ - период выделяемой высокочастотной составляющей кинематической погрешности; Р, - параметры дискретного . зевания Лапласа Амплитудно-частотная характеристика зтой передаточной фзт1кции будет равна УР (jfi) / Из графического изображения этой характеристик (фиг. 4) видно, что, с одной стороны, подавляется значительная часть низкочастотной составляющей кинематической погрешности, благодаря чему сравниваемые сигналы можно ре гистрировать на более чувствительном пределе измерения и одновременно увеличивать их информативность, а с другой сторюны, максимальная чувствительность при измерении будет на частоте, равной-. Таким образом, описанный способ позволяет повысить чувствительность и информативност измерения. Формула изобретения Способ измерения кинематической погрещносги зубчатых передач, заключающийся в том, что углы поворота начального и конечного звеньев передачи преобразуют в два сигнрла в виде последовательностей прямоугольных широто-модулнрозанных импульсов, сравнивают их по фазе, регистрируют сигнал, пропорциональный разности фаз, по которому судят о кинематической погрешности, и из результирующего сигнала выделяют путем фильтрации сигнал, соогаетстзующкй высокочастотной составляющей кинематической погрещности, о т л и, ч а кхщ и и с я тем, что, с целью повышения чувствительности и информативности измерения, перед сравнением сигналов по фазе периодически смещают фазу сигнала, соответствующего углу поворота начального звена передачи, до совпадения с фазой сигнала, соответствующего углу поворота ее конечного звена, а частоту смещения фаз сигналов выбирают удвоенной по отнощению к частоте высокочастотной составляющей кинематической погрещности. Источники информации, принятые во внимание при экспертизе 1. Металлорежутдий и контрольно-измерительный инструмент. Сборник НИИМаш, М., 1974, вьш. П, с. 25-29, 2.Авторское свидетельство СССР № 315908, кл. G 01 В 7/30, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
| Измерительный преобразователь перемещений | 1977 |
|
SU693113A1 |
| Цифровое устройство для измерения кинематической погрешности зубчатых передач | 1981 |
|
SU1017913A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1128109A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU962761A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 2004 |
|
RU2292064C2 |
| Система передачи и приема информации с многоосновным кодированием | 1989 |
|
SU1642590A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1015245A1 |
| Цифровой фазометр | 1981 |
|
SU1029100A1 |
ifF(jA)l
/
процесс
