Изобретение относится к области линейных и угловых изме|рений, а именно к устройствам комплексного контроля зубчатых колес и передач.
Известны устройства для измерения кинематической погрешности зубчатой пе|редачи, но ОНи не отвечают современным точностным требованиям конт1роля и не позволяют автолМатизировать процесс измерения.
Известны также цифровые измерительные устройства, которые при повышенной точности и полной автоматизации процесса измерения вычисляют значение кинематической погрешности, но не позволяют измерять боковой зазор зубчатой передачи.
Цель изобретения - автоматизация измерений бокового зазора зубчатой передачи.
Предлагаемое устройство снабжено реверсивным счетчиком текущего значения угла поворота, регистром фиксации угла поворота, выход которого подключен ко входу реверсивного счетчика текуш,его значения угла поворота, блоком управления и коммутации узлов этого устройства. Вход фазометрического блока определения диск|ретного значения кинематической погрешности подключен к точной ступени преобразователя угла поворота ведушего колеса л к грубой ступени преобразователя угла поворота ведомого колеса, через делитель образцового передаточного
отношения - к грубой ступени преобразователя угла поворота ведущего колеса, а выход фазометрического блока соединен со входами реве|рсивного счетчика измеряемой погрешности и через схему сравнения дискретных значений погрешности - со входом регистра запоминания диск1ретного значения погрешности. Вход реверсивного счетчика измеряемой погрешности подключен через блок управления и коммутации к точной ступени преобразователя угла поворота ведушего колеса и к выходу регистра запоминания дискретного значения погрешности, а выход реверсивного счетчика измеряемой погрешности соединен с блоком регист|рации значения измеряемой погрешности.
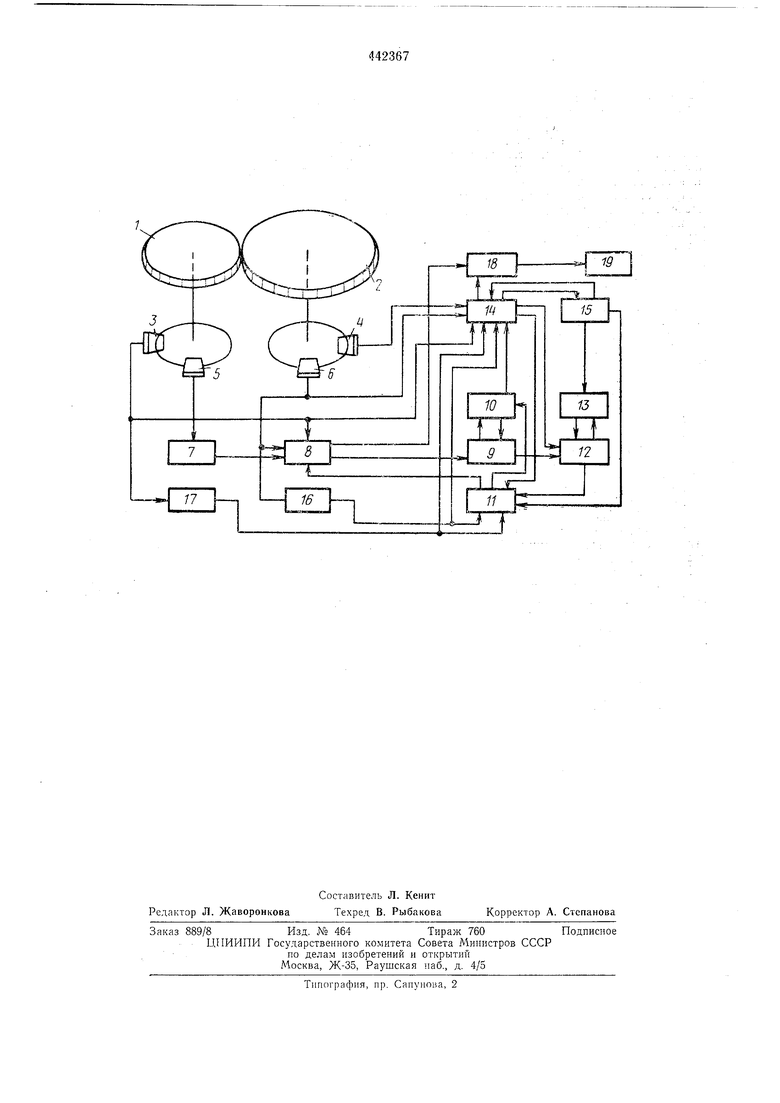
Сущность изобретения поясняется блок-схемой, на кото|рой показана коммутация основных элементов устройства.
Ведущее колесо 1 и ведомое колесо 2, соосно соединенные с однотипными преобразователями угла поворота в число-импульсный код, Находятся -в зацеплении на заданном межцентровом расстоянии и при изме|рении приводятся в движение от привода (не показан). Преобразователи выполнены с точными 3 и 4, с высокой разрешающей способностью, и прубыми 5 и 6 ступенями отсчета.
В делителе 7 образцового передаточного отношения в исходном состоянии устанавливается значение передаточного отношения в виде отношения числа зубьев ведомого колеса к числу зубьев ведущего.
Фазометрический блок 8 служит для определения дисиретного значения кинематиче- 5 ОКОЙ погрешности передачи с учетом знака.
Схема сравнения 9 сопоставляет дискретное значение кинематической погрешности, зарегистрированное фазометрическим блоком, со значением регистра 10 запоминания дискрет- Ю ного значения погрешности.
Блок 11 передачи дискретного значения кинематической погрешности содержит генератор импульсов и элементы управления.
Текуш,ее значение угла поворота ведомого 15 колеса определяется реверсивным счетчиком 12, который выдает команду окончания измерения.
Регистр 13 фиксирует значение угла поворота ведомого колеса, соответствующее мак- 20 симальному положительному значению кинематической погрешности, или значение угла для заданной фазы зацепления.
Блок 14 осуществляет функции управления и коммутации узлов уст1ройства.25
Реверсивный счетчик 15 фиксирует значение выбега по углу поворота грубой ступен-и -б и управляет работой блока И и регистра 13. ....
Счетчик 16 выдает команду окончания из- 30 мерения - оборот ведомого колеса. Блок 17 фиксирует момент реверса но очередности прихода .импульсов с точной ступени 3 преобразователя, сдвинутых по пространственной фазе на четверть шага преобразова- 35 теля.
Реверсивный счетчик 18 служит для вычисления измеряемой погрешности бокового зазора.
Блок регистрации 19 содержит дешифра- 40 тор-преобразователь двоичного кода в десятичный и цифровое табло.
При измерении бокового зазора цифровая схема устройства обеспечивает выполнение изме1рительных операций по следующей про- 45 грамме.
Работа устройства. Перед контролем все блоки устройства устанавливаются в исходное состояние.
Первый импульс с грубой ступени б преоб- 50 разователя является командой начала измерения, при этом на вход фазометрического блока 8 поступают импульсы со ступени 6 и через делитель 7 от лрубой ступени 5 преобразователя. Первый импульс, запускающий 55 схему, является командой подключения суммирующего входа счетчика 12 к ступени 6 через блок 14.
В фазометрическом блоке 8 определяется дискретное значение кинематической погреш- 60 ности путем квантования импульсами с точной ступени 3 преобразователя временного интервала между импульсами с делителя 7 и ступени 6 преобразователя. Знак дискретного значения кинематической полрешности оп- 65
ределяется очередностью прихода импульсов с делителя 7 и ступени 6.
Дискретное значение кинематической погрешности, вычисленное в фазометрическом блоке, сопоставляется схемой сравнения 9 со значением регистра 10. Операция сравнения позволяет записать в регистр 10 большее, значение из фазометрического блока, предварительно сбросив регистр, или coxipaнить в нем предыдущее значение. По окончании операции сравнения фазометрический блок сбрасывается. Б процессе измерения при переносе очередного значения из фазометрического блока в регистр 10 схема уравнения выдает командный импульс записи соде|ржания счетчика 12 в регистр 13, который предварительно сбрасывается. Таким образом, за полный оборот колеса в регистре 10 будет зафиксировано максимальное, например положительное, значение функции кинематической погрешности и в регистре 13 - соответствующий этому моменту угол поворота контролируемого колеса.
При полном обороте ведомого колеса счетчик 16 выдает командный импульс, по которому осуществляется передача блоком 11 содержания регистра 10 в счетчик 18 по входу вычитания через блок управления 14, после этой операции регистр 10 сбрасывается. Одновременно этот же импульс является командой на реверс привода, при этом счетчики 16 и 12 отключаются, а суммирующий вход счетчика 15 подключается блоком 14 к ступени 6 для подсчета значения угла выбега. Дискретное значение кинематической погрешности, соответствующее углу выбега, фиксируется фазометрическим блоком.
В момент реверса по сигналу с блока 17 блок 11 пе|реносит дискретное значение кинематической погрешности из фазометрического блока в счетчик 18 и отключает схему 9 и регистр 10. Положительное значение погрешности переносится в счетчик 18 но суммирующему входу, а очрицательное - по входу вычитания. По этой же команде блок 14 подключает сум-мирующий вход счетчика 18 к точной ступени 3 преобразователя.
При выборе мертвого хода первый импульс с точной ступени 4 преобразователя при помощи блока 14 отключает счетчик 18, а также подключает вход вычитания счетчика 15 к ступени 6. Этот же импульс является командой переноса блоком 11 neipBoro дискретного значения погрешности ,из блока 8 в счетчик 18. Положительное значение погрешности переносится в счетчик 18 по суммирующему входу, а отрицательное - по входу вычитания.
К моменту выбора выбега в счетчике 18 будет вычислено значение бокового зазора в начальной фазе зацепления, которое определяется как сумма дискретных значений кинематической погрешности по левым и правым профилям контролируемой передачи
и значения мертвого хода в соответствующей фазе зацепления.
После выбора выбега счетчик 15 подает команду neipeHoca содержания регистра 13 в счетчик 12 по входу вычитания, и по этой же команде блоком 14 осуществляется отключение счетчика 15 и подключение счетчика 12 по входу вычитания к ступени 6.
При компенсации содержания счетчика 12 последний выдает команду окончания измерения, ПО которой блоком 11 осуществляется перенос содержания дискретного значения кинематической погрешности из фазометрического блока в счетчик 18 по входу вычитания. Таким образом, в реве|рсивном счетчике 18 в результате измерения будет зарегистри(роваяа величина гарантированного бокового зазо|ра, которая регистрируется блоком 19.
Для определения бокового зазора в любой фазе зацепления достаточно предварительно ввести значение заданного угла повоipoTa в счетчик 12 по входу вычитания, а также соответствующее значение схемы 9 к полному обороту ведомого колеса 2 в 1регистр 13, отключить схему сравнения от фазометрического блока.
При измерении бокового зазора по описанной программе в момент компенсации заданного значения угла поворота в счетчике 12 последний выдает командный импульс в блок 11 для переноса содержания фазо.мет|рического блока, зафиксировавшего очередное дискретное Значение кинематической погрешности, в реве|рсивный счетчик 18, после чего счетчик 12 отключается.
Дальнейший процесс вычисления аналогичен описанному, но перенос содержания регистра 13 в реверсивный счетчик 12 осуществляется по сум.мирующему входу.
Результат измерения бокового 3a3qpa в любой фазе зацепления регист|рируется блоком 19.
Предмет изобретения
Устройство для из.мерения кинематической погрешности зубчатой передачи, содержащее
однотипные, имеющие ступени лрубого и точного отсчета преобразователя угла поворота в число-импульсный код, соосно соединяемые один с ведущим, другой с ведомым колесами этой передачи, электрически связанные между собой делитель образцового передаточного отнощения, фазометрический блок определения дискретного значения кинематической погрешности, схему рравнения д1 скретпых значений погрешности, регистр запоминания дискретного значения погрешности, блок пе|редачи дискретного значения погрешности, реверсивный счетчик измеряемой погрешности и блок регистрации значения измеряемой погрешности, отличающееся тем, что, с целью автоматизации изме|рений бокового зазо|ра зубчатой передачи, оно снабжено реверсивным счетчпком текущего значения угла поворота, регистром
фиксации угла поворота, выход которого подключен ко входу реверсивного счетчика текущего значения угла поворота, блоком управления и ком.мутации узлов этого устройства, вход фазометрического блока определения дискретного значения кинематической погрешности подключен к точной Ступени преобразователя угла noBqpOTa ведущего колеса и к г|рубой ступени преобразователя угла поворота ведомого колеса, через делитель образцового передаточного отнощения - к грубой ступени преобразователя угла поворота ведущего колеса, а выход фазометрического блока соединен со входами реверсивного счетчика измеряемой погрешности и через схему
сравнения диск|ретных значений погрешности - со входом регистра запоминания дискретного значения погрешности, вход реверсивного счетчика измеряемой погрешности подключен через блок управления и
коммутации к точной ступени преобразователя угла поворота ведущего колеса и к выходу регистра запоминания дискретного значения погрешности, а выход реве1рсивного счетчика измеряемой погреш-ности соединен
с блоком регистрации значения измеряемой погрешности.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения кинематической и циклической погрешностей зубчатых колес | 1978 |
|
SU872950A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ И ЦИКЛИЧЕСКОЙ ПОГРЕШНОСТЕЙ ЗУБЧАТЫХ КОЛЕС | 1972 |
|
SU335529A1 |
| Устройство для измерения кинематической и циклической погрешностей зубчатых колес | 1977 |
|
SU750269A2 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для измерения и контроля параметров аналого-цифровых преобразователей | 1981 |
|
SU1005297A1 |
| Управляемое фазосдвигающее устройство | 1980 |
|
SU907460A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1980 |
|
SU896389A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU896653A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU383206A1 |