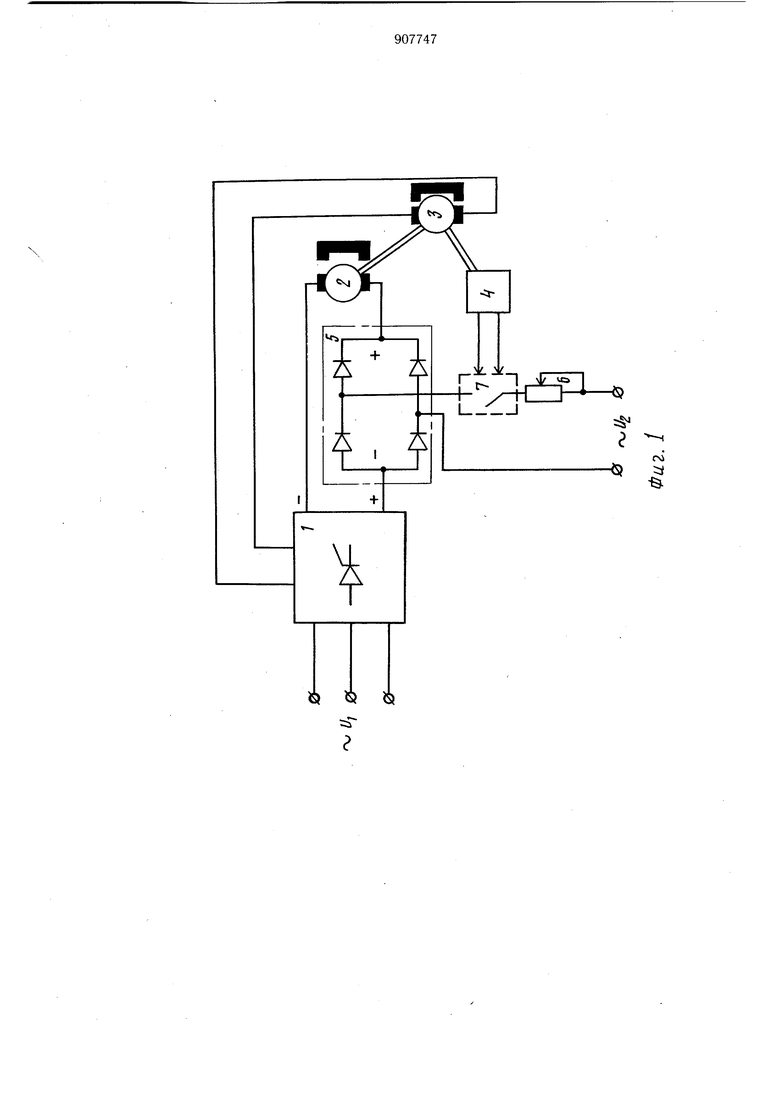
реверсивного преобразователя 1. Выпрямительный мост 5 соединен с источником переменного тока через ключ 7 и резистор 6. Управление ключом 7 осуществляется от импульсного датчика 4, жестко закрепленного на валу электродвигателя 2 и формирующего за один оборот вала электродвигателя число импульсов, равное числу зубцов якоря. Выходное напряжение тахогенератора 3, как сигнал обратной связи по скорости, подается в схему управления управляемого нереверсивного преобразователя 1.
Электропривод постоянного тока работает следующим образом.
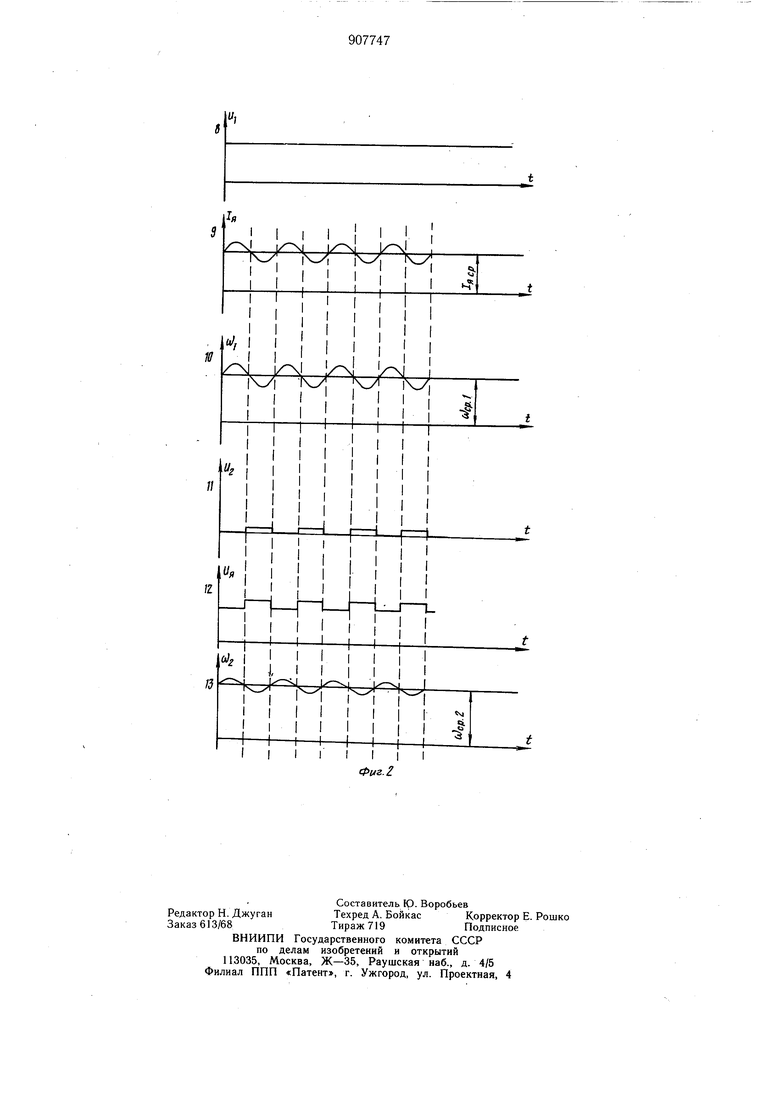
Ключ 7 отключен. Управляемый нереверсивный преобразователь 1, электродвигатель 2 с тахогенератором 3 (фиг. 1) образуют обычную систему автоматического регулирования с обратной связью по скорости. Для случая постоянства напряжения сети и постоянства нагрузки на валу электродвигателя 2 выходное напряжение управляемого нереверсивного преобразователя 1 можно, с некоторым приближеием, графически представить прямой 8 (фиг. 2), если не учитывать пульсации напряжения, обусловленные питанием управляемого нереверсивного преобразователя 1 от сети переменного тока. Тогда характер изменения тока якоря электродвигателя 2 (фиг. 1), вызванньш зубцовыми пульсациями магнитного потока, можно представить в виде кривой 9 (фиг. 2), а характер изменения частоты вращения электродвигателя 2 (фиг. 1)в виде кривой 10 (фиг. 2).
Ключ 7 включен. В связи с тем, что импульсный датчик 4 формирует за один оборот вала электродвигателя 2, (фиг. 1) число импульсов, равное числу зубцов якоря, ключ 7 включается синхронно с зубковыми пульсациями магнитного потока. При включенном положении ключа 7 на выходе выпрямителя 5 появляется напряжение 11 (фиг. 2), величина которого регулируется резистором
6. Напряжение на якоре электродвигателя 2 в любой момент времени является арифметической суммой напряжений 8 и U и графически может быть представлено в виде кривой 12 (фиг. 2). Благодаря изменению величины подводимого к якорю напряжения синхронно с зубцовыми пульсациями магнитного потока имеет место уменьщение пульсаций тока якоря, так как в любой момент времени величина тока якоря определяется суммарным действием напряжения 8 и пульсациями напряжения 11, синхронными с зубцовыми пульсациями магнитного потока. Уменьщение пульсаций тока якоря приводит к уменьщению пульсации частоты вращения 13 (фиг. 2) электродвигателя.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель с зубчатым якорем, вал которого сочленен с тахогенератором, соединенным с управляющим входом нереверсивного преобразователя, выход которого подключен к якорной обмотке электродвигателя, отличающийся тем, что, с целью повыщения стабильности частоты вращения, в него дополнительно введены выпрямительный мост, переменный резистор, ключ и импульсный датчик, соединенный с управляющим входом ключа, причем вход выпрямительного моста подключен через ключ и резистор к выводам источника переменного тока, а его выход последовательно включен в цепь якорной обмотки электродвигателя.
Источники информации, принятые во внимание при экспертизе
1.Комплектные регулируемые электропривода постоянного тока, М., «Информэлектро, 1972, с. 28-40.
2.Автоматизированный электропривод в промыщленности. М., «Энергия, 1974, с. 287.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ЭЛЕКТРОПРИВОДА АГЛОЛЕНТЫ | 2002 |
|
RU2232121C1 |
| Реверсивный бесконтактный тахогенератор постоянного тока и способ его настройки | 1988 |
|
SU1557642A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Электропривод постоянного тока с упреждающим токоограничением | 1978 |
|
SU1105999A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Электропривод постоянного тока | 1983 |
|
SU1089746A1 |
| Регулируемый электропривод постоянного тока | 1981 |
|
SU968881A1 |
| Электропривод | 1980 |
|
SU955472A1 |