(54) РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПН1ВОД ПОСТОЯННОГО ТОКА
1
Изобретение относится к электротехнике и может найти применение в качеств ве реверсивного эпектропривода постоянного тока прецизионных механизмов, эпек троприводов подач метаппорежуших станков с большим диапазоном регулирования скорости и т.п.
Известен регулируемый электропривод постоянного тока, содержащий последовательно соединенные регулятор, сумматор, устройство управления преобразователем, силовой преобразователь, электродвигатель, тахогенератор. В состав устройства управления преобразователем входят синхронизатор, задакхций тактовую частоту, источник смешения,два нуль-органа и триггер Cl.
Данное устройство работает во всем диапазоне регулирования скорости, что вносит в ток электродвигателя низкочастотные пульсации и на максимальных ско ростях его работы, что снижает коэффициент использованиядвигателя и вносит г в электропривод дополнительные потерн
энергии. Известно также, что пульсации скорости, проходя на вход регулятора и силового преобразователя (фактор пульса- . ций), снижают в целся коэффициент передачи прямой цепи электропривода, ухудшая тем самым статические и динамические характеристики электропривода. Кроме того, компенсация сухого трения осуществляется в данном устройстве при помошй фиксированных настроек тока троtoгания двигателя, а при изменении сухого трения, нштример в сторону его увеличения (что зачастую бывает на металлорежущих станках), не происходит линеаризация сухого трения без вмешательстве чело15века.
Наиболее близким по своей техничес к. кой сущности к изобретению является регулируемый электропривод постоянного ,jj тока, содержащий электродвигатель постоянного тока, соединенный с преобразователем, управляющие входы которого соединены с блоком управления преобразователем, состоящем из каналов, количество
3968881.4
которых равно половине чиспа фаэ преоб- . го управляемого ключа каждого канала, разоватепя, вкшочаютий синхронизатор так- включенного между выходом источника тоаой частоты, связанный через источник смешения со входами двух нуль-органов, вторые входы которых соединены с соответствуй щими источниками смешения противогголожных фаз преобразователя, а выходы - со входами блоков управления тиристорами, выходы которых соединены с управляющими входами преобразователя, ; третьи входы нуль-органов соединены с выходом регулятора скорости, соединенным с входами блоков жесткой и гибкой обратных связей, выходы которых через управляемый ключ соединены с входом регуля тора скорости, соединенным с выходом узла Сравнения, один вход которого с задатчиком интенсивности, а второй связан с тахогенератором, вал которого сочленен с валом электродвигателя постоянного тока 2, Этот эпектр.опривод обеспечивает уско ренное прохождение зоны нечувствительности лишь модулятора импульсов и самого регулятора (отдельной части .схемы управления электропривода) и не позволяет эффективно проходить зону нечувствительности силового механизма электропривода (которая пропорциональна моменту сухого трения и если имеется люфт механизма). Причем момент сухого трения покоя всегда больше момента сухого трения- движения, что ведет к значительным застоям электропривода при его пуске на минимальные скорости даже при безынерционных Ь определенном смысле преобразователе (без зоны нечувствитель ности). Электропривод не компенсирует момент сухого трения покоя, что может вызвать значительные пульсации скорости .(релаксационные колебания) при работе электропривода на минимальных скоростях Цепью изобретения является улучшение ткачества регулирования электропривода. Поставленная цель достигается тем, что в электропривод введены фильтр низкой частоты, блок модуля с,зоной нечувствительности, дополнительные управляемые ключи и блок наличия частоты вращения, причем вход фильтра низкой часто ты соединен с выходом тахогенератора, а выход соответственно - со вторым .вхо дом узла сравнения, с входом блока на личия чартоты вращения и с входом блок
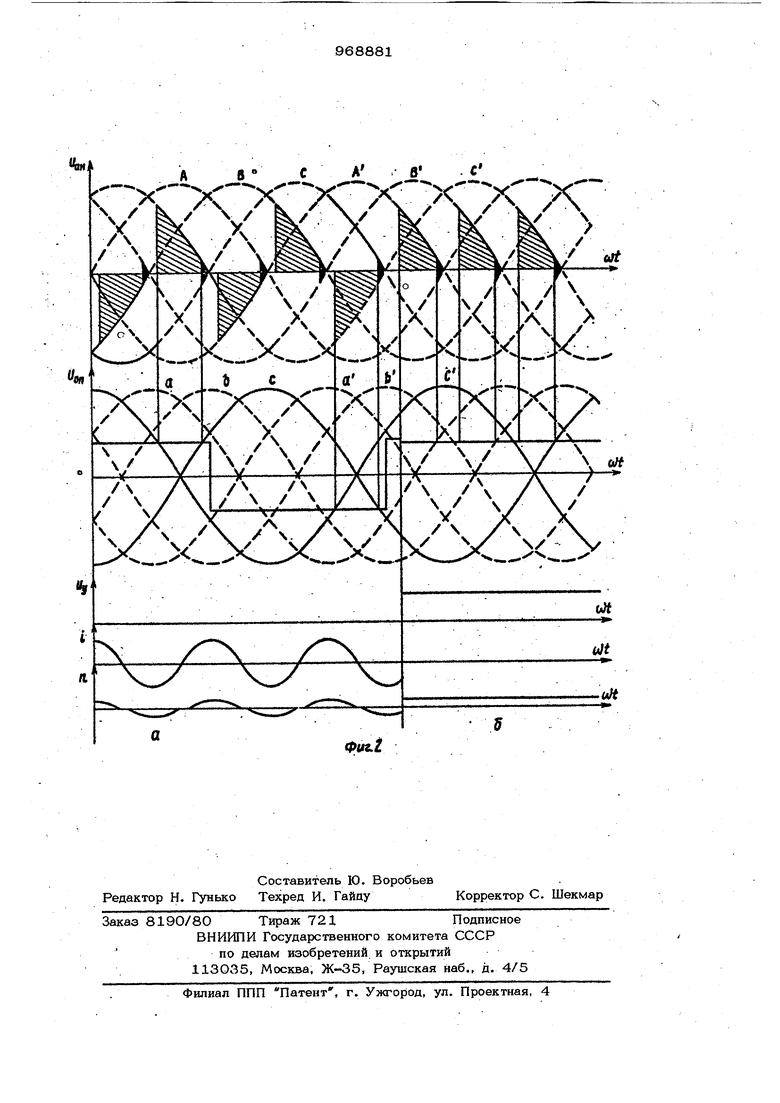
модугтя с зоной нечувствительности, выход которого соединен с управляющим входом соответствующего дополнительножелаемого темпа прохождения зоны нечувствительности всего электропривода, включая и момент суХого трения, смещения и входами нуль-органов, а выход блока наличия частоты вращения соединен с управляющим вxoдo l управляемого ключа. На фиг. 1 изображена принципиальная схема электропривода; на фиг. 2 - временные диаграммы его работы. Регулируемый электропривод постоянного тока содержит электродвигатель 1 постоянного TOKai соединенный с преобразователем 2, управляющие входы которого соеДйаены с блоком 3 управления преобразователем 2. Блок 3.состоит из каналов, количество которых равно половине числа фаз преобразователя /2. Каждый канал состо.ит из синхронизатора 4 тактовой частоты,, связанный через источник 5 смещения со входами нуль-органов б и 7, вторые входы которых соединены с соответствующими источниками смещения противоположных фаз преобразователя 2, а выходы - с входами блоков 8 и 9 управления тиристорами, выходы которых соединень с управляющими входами преобразователя 2, третьи входы нупь-органов соединены с выходом регулятора 10 скорости, соединенным со входами блока 11, жесткой и блока 12 гибкой обратных связей, выходы которых через управляемый ключ 13 соединены со входом регулятора 1О, соединенным со входом узла 14 сравнения, один вход которого соединен с задатчиком 15 скорости, а второй связан с тахогенератором 16, вал которого сочленен с валом электродвигателя 1. Фильтр 17 низкой частоты соединен своим входом с выходом тахогенератора 16, а выход фильтра 17 соединен, соответственно, со вторым входом узла 14, с входом блока 18наличия частоты вращения и с входом блока 19 модуля с зоной нечувствительности, выход блока 18 соединен с управляющим входом соответствующего дополнительного управляемого ключа 20 каждого канала, включенного между выходом источника 5 смещения и входами нуль-органов 6 и 7, а выход блока 19 соединен с управляющим входом управляемого ключа 13. Обратные связи регулятора 10 рассчитаны так, что при их подключении регулятор 10 имеет передаточную функцию в виде пропорционального коэффициента, величина которого выбирается из условия 59 Выведем зависимость уггеа включения вентиля преобразователя 2, а точнее напряжения управления, в функции момента трения электропривода, по которому необходимо будет осуществлять включение вен типей преобразователя 2. с совместным согласованным управлением так, чтобы в цепи якоря протекал переменный ток пониженной частоты rSli ( при которой пре образователь по теореме Котепьникова еще управляем), а скорость вращения дви гателя осуществляет высокочастотные колебания около состояния равновесия. При чем такая частота на влияет на регулировочные свойства всего электропривода, а амплитуду желательно выбирать из условия 5% от требуемой минимальной величины скорости, а в случае, если в механизме имеется пюфт, то .амплитуда колебания скорости . должна быть равна (или больше) половине ширины люфтовой зоны. Так как величина тока связана через пропорциональный коэффициент ее моментом электродвигателя 1, то ток через вентиль может быть определен для совместного согласованного управления преобразователем по : ..выражению (i--)-; l-4lr-) 1 .l am-wL L где Огп - амплитудное значение напряжения преобразователя 2; круговая частота сети; суммарное значение индуктивности якорной цепи электродвигателя 1; угол регулирования выпрямительной группы вентилей прю- образователя 2; р гЯ-oL - угол регулирования инверторной группы вентилей преобразователя 2 с совместным управлением;m - количество фаз преобразователя 2. Раскрывая скобки в выражении (1) и упрощая его, заменяя ток в левой части уравнения (1) через момент трения, получим выражение At -CosoC относительное значение момен та трения электродвигателя I по отношению к номинальном относительное значение моме ,5) MH та электродвигателя по отношению к номинальному; 1 k ,ц - ПОСТОЯННЫЙ конструктивный коэффициент электродвигателя; - номинальный момент электродвигателя. Рещая уравнение (2) относительно угла включения вентиля в выпрямнтельно9 группе, получим зависимость угла включения от относительного значения момента тренияд oi o rCCOS j , угол регулирования в инверторной группе определится как ,ft j7-(i J(-oirccoT5 f 1 . г г - относительное значение моr -mcij мента трения по отнощению к максимальному моменту электродвигателя при максимальном токе преобразователя. С учетом того, что при синусоидальном опорном напряжении импульсного устройС1ва угол ot arc cos получим ,c.rccos c.rccos откуда для выпрямительной группы напряжение управления определяется по выражению М/ п и и СО 5 а С COS--чг- (3) (мй ол««л JI для инверторной группы по выраженгао . и. Uv, cos arc cos . Упрощая выражения (3) и (4), получим: IsmАнализ полученных выражений (5) и (б) показывает, что выпрямительная и нверторная группы вентилей имеют одиаковые по величине и противоположные о знаку напряжения управления для одой пары противоположных фаз преобраователя 2 одного канала управления в ункции заданного относительного значеия момента трения электропривода. о Регулируемый электропривод постояного тока работает следующим образом. Работу электропривода рассмотрим дл вух режимов: когда в нем отсутствует задающее наряжение нли оно очень мало; когда эяект опривод р абртает на минимальной скорости . е. когда есть задающее напряжение, 7968 снимаемое с задатчика 15 скорости (см. фиг. 1). В первом режиме ключи 13 и 20 включены, регулятор 10 имеет передаточную функцию пропорционального звена с желаемым коэффициентом передачи входного сигнала в случае его появления для быстрого (форсированного) прохождения всех зон , нечувствительности электропривода, включая и сухое трение, а ключ 20 позволяет прохождению синхронизирующего напрйжения, снимаемого с синхронизатора 4, чёрез источник 5 смещения и подачу его на входы нуль- оргаЛов 6 и 7 первого канала управления фаз А. На вторые входы нульорганов 6 и 7 поступают опорные напря- жения соответствующих фаз А и А (см. фиг. 2) для U0 изображенные сплошными линиями вместе с синхронизирующим напря жением снимаемогб с выхода ключа 2О (см. фиг. 2 а). На третьи входы нуль-органов 6 и 7 поступает сигнал с регулятора 1О, который в данном режиме практически отсутствует. В результате алгебраического суммирования трех сигналов на входах нуль-органов 6 и 7 последние переключаются,а бдоки 8 и 9 по передним и задним фронтам импульсов, снимаемых с выходов нуль-органов 6 и 7, запускают соответствующие вентили в выпрямитель- ной и инверторной группах преобразователя 2. Преобразователь 2с учетом того, что по очереди работают все каналы управления А, В и С, вырабатывают импульсы напряжения равной величины, но чередующиеся по знаку, подает их на якорную цепь электродвигателя 1. В электродвигателе 1 под действием такого напряжения начинает протекать переменный ток с , со сдвигом по фазе отночастотойсительнр первой гармоники импульсного напряжения на угол, определяемый активно-индуктивной нагрузкой якорной цепи электродвигателя 1. При этом, величина амплитуды тока, рассчитанная по выражению (1), необходимая Яля преодоления момента сухого трения, позволяет создать такой момент электродвигателя 1, который выше момента трения. В результате этого электродвигатель совершает колебательные движения вокруг состояния равновесия с малой амплитудой и снижает статическую погрешность в электроприводе при малых скоростях вращения (см. фиг. 2а) для этогр режима работы электродвигателя 1. При появлении на входе регулятора 10 задающего напряжения, соответствующего 18 амплитуде синхронизирующего напряжения (режим о), ключи 13 и 20 закрьгааются соответствующими напряжениями,. снима(Вмыми с блока 18 и с блока 19 модуля с зоной нечувствительности. Злектропривод в атом режиме работы работает как обычный электропривод, регулятор 1О скорости имеет пропорционально интегральную передаточную функцию, а импульсы с синхронизирующего устройства 4 не проходят на входы нуль органов 6 и 7. Это позволяет избежать значительные пульсахйи тока в якорной цепи электродвигателя 1 при работе его в широком диапазоне ско-, ростей. Когда момент сухого трения не оказьшает существенного влияния на высо-кие частоты и вращения,позволяет получить минимальные потери энергии и увеличить коэффициент использования электродвигат ля 1. Момент сухого трения покоя значительно выше момента сухого трения движения, а при введении в электропривод вынужденньйс колебательных движений вала электродвигателя 1, добиваются снижения момента сухого трения, а переключение регулятора 1О с пропорционально интегрального звена на пропорциональное звено позволяет получить быстрое прохождение зон нечувствнтельностей во электроприводе, например при его реверсе, что значительно увеличивает его быстродействие. Идеализированные диаграммы (см. фиг. 2с«и фиг. 25 ) показывают работу электропривода в квазиустановившихся режимах при отсутствии сигнала управления и при его наличии постоянной величины. Зачерненные участки характеризуют площадь ЭДС преобразователя, при ладываемую к уравнительному контуру, а ЭДС прикладываемая к электродвигателю в этот момент, равна нулю. Анализ этих осциллограмм позволяет сделать вывод о том, что в электроприводе улучшаются статические и динамические показатели, т. е. качество регулирования особенно в зоне малых скоростей при наличии зон нечувствительноетей и момента сухого трения в электроприводе. Кроме того, в электроприводе увеличивается коэффициент использования электродвигателя, снижаются потери энергии и уменьшается коэффициент гармоник, вносимый электроприводом в сеть из-за исключения пульсирующего напряжения при высоких частотах вращения. PJB., улаизоб ре тения Регулируемый электропривод постоянного тока, содержащий электродвигатепь постоянного тока, соединенный с преобразователем, управляющие входы которого соединены с блоком управления преобразователем, состоящем из каналов, количество которых равно половине числа фаз преобразователя, включающих синхронизатор тактовой частоты, связанный че рез источник смещения с входами двух нуль-органов, вторые входы которых соединены с соответствующими источниками смещения противоположных фаз пр образователя, а выходы - с входами блоков управления тиристорами, выходы которых соединены с управляющими входами преобразователя, третьи входы нуль-органов соединены с выходом регулятора скорости соединенным с входами блоков жесткой и гибкой обратных связей, выходы которых через управляемый ключ соединены с входом регулятора скорости, соединенным с выходом узла сравнения, один вход которого соединен с задатчиком скорости, а второй связан с тахогенератором, вал которого сочленен свалом электродвигателя постоянного тока, отличающ и и с я тем, что, с целью улучшения
качества регулирования, в него введены фильтр низкой частоты, блок модуля с зоной нечувствительности, дополнительные управляемые ключи и блок наличия частоты вращения, причем вход фильтра низкой частоты соединен с выходом тахогенера-, тора, а выход соответственно - со вторым входом узла сравнения, и с входом бло- наличия частоты вращения и с входом блока модуля с зоной нечувствительности, выход которого соединен с управляющим входом соответствукнцего дополнительного управляемого ключа каждого канала, включенного между выходом источника смещения и входами нуль-органов, а выход блока наличия частоты вращения соединен с управляющим входом управляемого ключа.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР Ms 4977О1. кл. Н ОЗ Р 5/О6, 1976.
2.Авторское свидетельство СССР № 736321, кл. Н О2 Р 5/16, 1979.




| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Электропривод постоянного тока | 1979 |
|
SU917291A1 |
| Реверсивный электропривод постоянного тока | 1975 |
|
SU746849A1 |
| Реверсивный электропривод постоянного тока | 1977 |
|
SU736321A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод постоянного тока | 1981 |
|
SU970617A1 |
| Реверсивный вентильный электропривод | 1982 |
|
SU1138913A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
Ав V /Sv / /. щ/ -
