(54) ДВУХДВИГАТЕЛЬНБШ ЭЛЕКТРОПРИВОД С УПРУГОЙ СВЯЗЬЮ
1
Изобретение относится к электротехнике и может быть использовано для выравнивания моментов двухдвигательного электропривода постоянного тока с упругой механической связью.
Известны электроприводы, содержащие две последовательно соединенные электродвигателя с упругой механической связью, питаемые одним источником питания. Выравнивание моментов осуществляется за счет того, что через якорные цепи электродвигателей протекают одинаковые токи, а так как обмотка возбуждения питается от синхронизированных источников питания, моменты развиваемые двигателями будут одинаковыми 1.
Недостатком этих приводов является автоколебания, возникающие при наличии упругой механической связи имеющей люфты.
Наиболее близким к изобретению техническим рещением является электропривод, содержащий два электродвигателя, два тиристорных преобразователя, первый из которых подключен выходом к якорной цепи первого электродвигателя, блок регулирования скорости первого электродвигателя, датчик момента второго электродвигателя, выход которого подключен к первому входу регулятора момента, выход регулятора момента подключен к первому входу регулятора тока, подключенного к входу второго тиристорного преобразователя, к второму входу регулятора тока подключен выход датчика тока якоря второго электродвигателя.
Воздействие на момент второго двигателя осуществляется путем регулирования тока возбуждения. Этот электропривод позволяет осуществить выравнивание моментов электродвигателей при плавном из15 менении нагрузки 1.
Недостатком этого электропривода является низкая точность выравнивания моментов при резкоменяющемся характере нагрузки. Это объясняется тем, что регули20рование по цепи возбуждения электродвигателя имеет больщую инерционность, например величина нарастания нагрузки составляет 0,2 с, что не позволяет применять такую схему в устройствах с резкомекяющей39077524
ся нагрузкой, где требуется точность вырав-лятора 13 тока соединен с выходом регулянивания момента до Г/о . В такой схе-тора 14 момента, первый вход которого соеме при резкоменяющемся характере на-динен с датчиком 9 момента первого двигрузки в широком диапазоне регули-гателя, а второй вход с датчиком 10 морования скоростей возникает большая ди-мента второго двигателя, намическая ошибка за счет большой посто- sУстройство работает следуюшим обраянной времени контура регулирования це-зом.
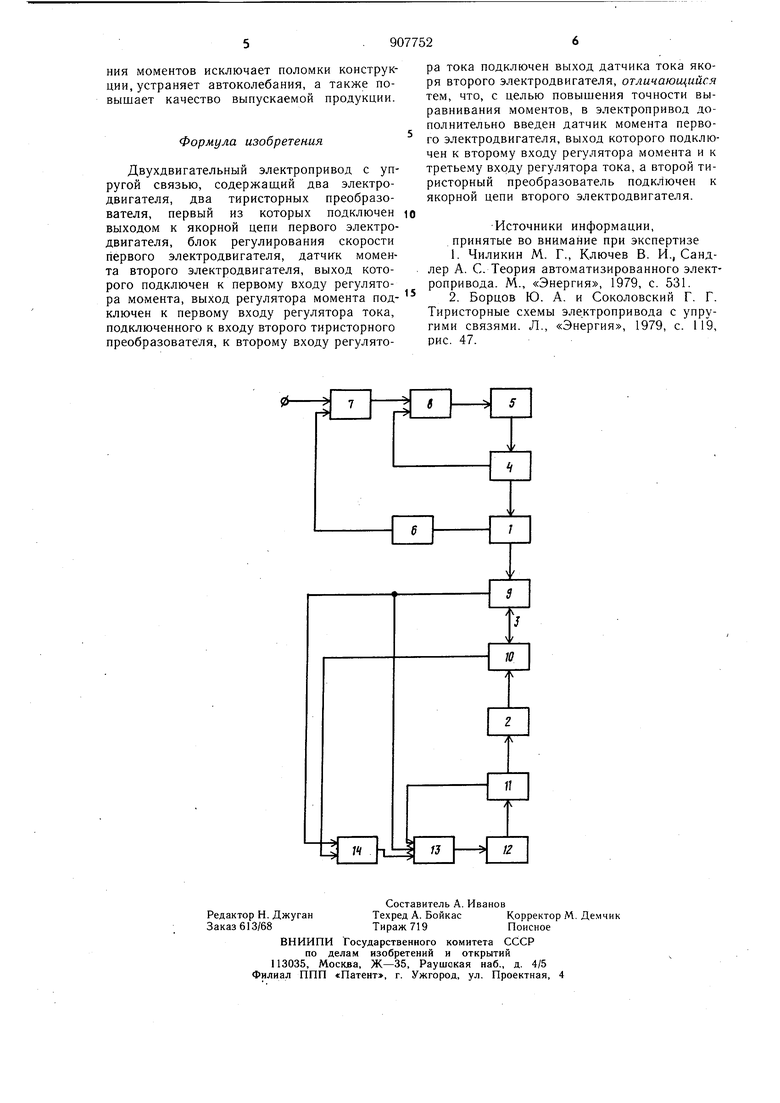
пи возбуждения. Кроме того, регулиро-При изменении нагрузки на выходном вание цепи возбуждения вносит в систе-валу первого 1 и второго 2 двигателей сигму ограничения на величину выравнивае-нал с тахогенератора 6 поступает на втомых моментов, что связано с насыщениемрой вход регулятора 7 скорости одновремагнитной цепи регулируемого двигателя. менно с сигналом задания, поступающим Таким образом, схема с регулированиемна первый вход. Сигнал с выхода регуляэлектроприводов в цепи возбуждения не-тора 7 скорости является заданием для приемлема для выравнивания моментов вконтура регулирования тока и поступает цепях с резкоменяющейся нагрузкой, из-зана первый вход первого регулятора 8 тока, низкой динамической точности. j второй вход которого поступает сигнал Цель изобретения - повышение точное-обратной связи по току первого датчика 4 ти выравнивания моментов.тока. Сигнал с выхода первого регулятора 8 Поставленная цель достигается тем, чтотока управляет работой тиристорного прев электропривод дополнительно введен дат-образователя 5. -Второй двигатель 2 нахочик момента первого электродвигателя,дится на одном валу с первым 1 и вращаетвыход которого подключен к второму вхо- 20ся с скоростью, определяемой заданием на ду регулятора момента и к третьему вхо-скорость первого двигателя 1. Упругие свойду регулятора тока, а второй тиристорныйства вала приводят к тому, что крутящие преобразователь подключен к якорной це-моменты, измеренные датчиками 9 и 10 пи второго электродвигателя.момента первого и второго электродвигаНа чертеже представлена структурная jjтелей различные. Для отработки рассогласхе.ма электропривода.сования этих моментов сигнал с датчика 9 Устройство содержит первый 1 и вто-момента первого двигателя поступает на рой 2 двигатели, соединенные между со-первый вход регулятора 14 моментов, а бой упругой связью 3. Якорная цепь пер-сигнал датчика 10 момента второго двивого двигателя .1 содержит последователь-гателя поступает на второй вход регуляно соединенныемежду собой первый дат- зотора 14 момента. Большой коэффициент чин 4 тока и первый тиристорный преобра-усиления регулятора 14 момента позволяет зователь 5. Система управления первымотработать сигнал рассогласования с тредвигателем 1 содержит контур регулирова-буемой точностью. Сигнал рассогласования ния тока, контур регулирования скорости,с выхода регулятора 14 моментов поступает состоящей из тахогенератора 6, установ-на первый вход регулятора 13 тока, на ленного на валу первого двигателя 1, сое- других входа которого поступают сигдиненного с регулятором 7 скорости, вы-налы с датчика И тока и датчика9 моход которого последовательно соединен смента первого электродвигателя. Сигнал первым входом первого регулятора 8 тока,с выхода регулятора 13 тока поступает на выход которого соединен с входом первоговход второго тиристорного преобразоватиристорного преобразователя 5. Контур 12, регулируя напряжение второго регулирования тока первого двигателя 1двигателя 2. Это обеспечит отработку возсостоит из первого датчика 4 тока, выходмущения вторым электродвигателем с болькоторого соединен вторым входом регу-шой точностью.
лятора 8 тока. На выходном валу первогоИзобретение повышает точность выравдвигателя 1 установлен датчик 9 момен-нивания моментов в системах с резко мета первого двигателя. На выходном валу няющейся нагрузкой. Повышение точносвторого двигателя 2 установлен датчик™ достигается тем, что регулирование мо10 момента второго двигателя. Якорнаяментов проводится по цепи якоря, а не по цепь второго двигателя 2 содержит после-Ц пи возбуждения. Цепь якоря является довательно соединенные датчик 11 токаменее инерционной (постоянная времени и второй тиристорный преобразователь 12. 50якорной цепи отличается от постоянной
Система управления второго двигате-ней и большой мощности как минимум на
ля 2 состоит из контура регулированияпорядок), что позволяет приводу отрабамомента и контура регулирования тока.тывать рассогласование по моменту при
Контур регулирования тока второго дви-резко меняющимся характере нагрузки,
гателя содержит датчик 11 тока выход 55Наличие на входе регулятора моментов
которого подключен к второму входу ре-сигналов с первого и второго датчиков
гулятора 13 тока, третий вход которогомоментов позволяет с требуемой точностью
соединен с выходом датчика 9 момента пер-(до 1%) осуществить синхронизацию мового двигателя, первый вход второго регу-ментов. Повышение точности выравнивавремени цепи возбуждения в машинах сред
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод с упругой связью | 1981 |
|
SU964949A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Устройство для испытания электропривода с упругой механической передачей от двигателя к механизму | 1981 |
|
SU1000950A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод | 1981 |
|
SU985911A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА | 1990 |
|
RU2026209C1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Электропривод | 1990 |
|
SU1758820A1 |
| Электропривод постоянного тока с оптимальным управлением | 1986 |
|
SU1471274A1 |
| Электропривод постоянного тока по системе генератор-двигатель с упругим звеном и способ для его управления | 1987 |
|
SU1723649A1 |
