(5) ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1985 |
|
SU1307522A1 |
| Устройство для торможения автономного транспортного средства с тяговым электроприводом постоянного тока | 1988 |
|
SU1553416A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1975 |
|
SU752711A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
1
Изобретение относится к электрогехнике и иожет быть использовано, для систем регулирования частоты вращения электродвигателей постоянного тока в двигательных и тормозных режимах при питании последних от сети переменного тока через вентильные преобразователи.
Существуют электроприводы транспортных устройств, такие как морскиесуда специального назначения, плавучие полупогружные буровые установки, где необходимо применение подъемнотранспортных устройств большой мощности. Особенностью этих устройств является большая длительность тормозных режимов, высокие требования к весо-габаритным показателям., экономичному использованию энергии.
Известно устройство, .содержащее силовое сопротивление, включенное на зажимы двигателя через тиристор, управляющий электрод которого соединен через стабилитрон и сопротивление с анодной цепью тиристо{:)а. Последовательно с тиристором включен контакт силового контактора, узел управления которым соединен с выходами датчиков тока якоря двигателя, тока преобразователя и то,ка, протекающего через тормозное сопротивление П.
Использование этого устройства
10 в мощных электроприводах требует применения громоздких сопротивлений динамического торможения, сильноточных переключающих устройств, что усложняет систему в целом.
15
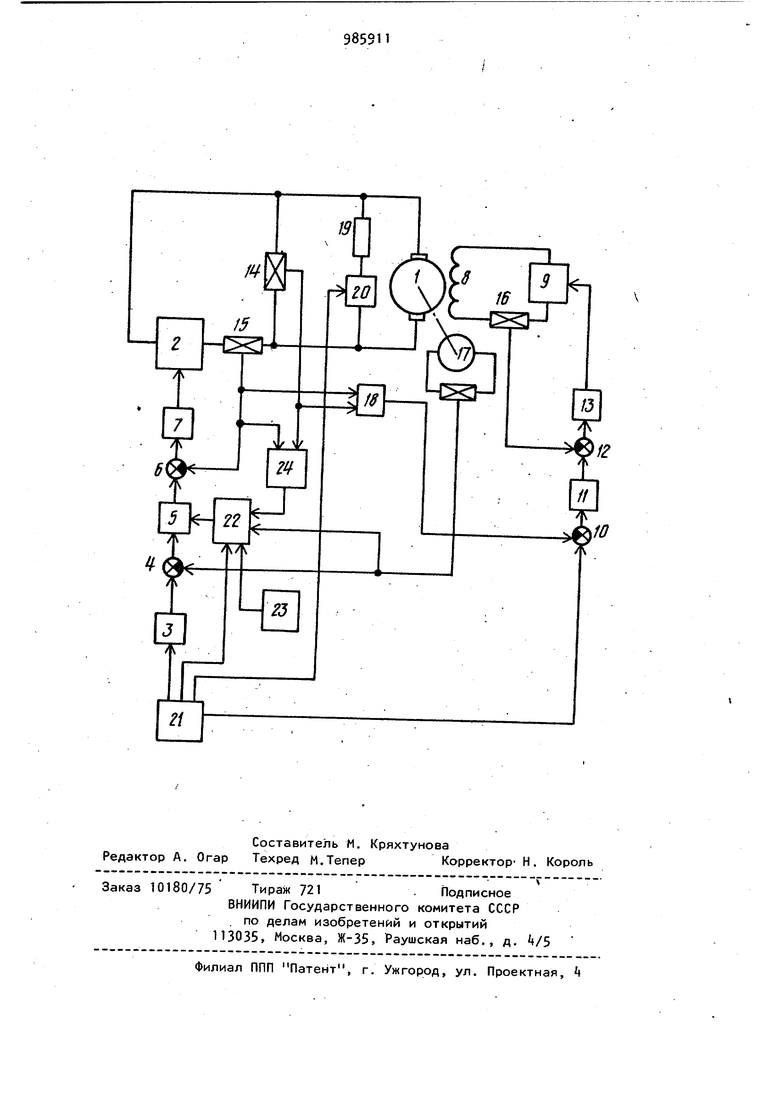
Наиболее близким к предлагаемому является электродпривод, содержащий электродвигатель постоянного тока, якорная обмотка которого подключена 2Q к вентильному npeoбpaзoвateлю, последовательно соединенные задатчик интенсивности, первый узел сравнения, регулятор скорости, второй узел сравнения и регулятор тока якоря, выход 398 которого подключен к входу вентильного преобразователя, обмотка возбуж дения, электродвигателя соединена с т тиристорным возбудителем, последовательно соединенные третий узел сравнения, регулятор ЗДС, четвертый узел сравнения и регулятор тока возбуждения, выход которого подключен к тири- сторному возбудителю, датчики напряжения, тока якоря и возбуждения, ско рости и ЭДС, выходы которых связаны с входами соответствующих указанных ре гуляторов параллельно якорной обмотке электродвигателя подключена цепь из последовательно соединенных резистора динамического торможения и коммутатора. Система включает в себя три канала, причем первые два канала регулирования служат для регулирования частоты вращени}1 электродвигателя в двигательных режимах. Связь между каналами осуществляется.по ЭДС. Третий канал регулирования служит для регулирования частоты вращения электродвигателя в тормозных режимах .Zj : В известном устройстве .наличие отдельного канала регулирования в тормозных режимах усложняет систему регулирования. Кроме того, торможени электродвигателя путем превращения всей энергии торможения в тепло является неэкономичным. Цель изобретения - улучшение энер гетических показателей электропривода. Поставленная цель достигается тем что в электропривод дополнительно введены блок выбора режимов работы электродвигателя, блок задания рекуперируемой энергии, блок измерения текущего значения рекуперируемой энергии, многофункциональный .блок ограничения, причем выходы блока выбора режимов работы электродвигателя подключены к задатчику интенсивности к коммутатору, к входу третьего узла сравнения и к одному из входов много функционального блока ограничения, к другим входам которого подключены датчик скорости, блок задания рекупе рируемой энергии и выход блока измерения текущего значения рекуперируемой энергии, вход которого подключен датчикам тока, напряжения и ЭДС. На чертеже представлена схема электропривода. Электропривод содержит электродви гатель 1, якорная обмотка которого подключена к вентильному преобразов 4 телю 2, последовательно соединенные задатчик 3 интенсивности, узел Ц сравнения; регулятор 5 скорости, узел 6 сравнения и регулятор 7 тока якоря, выход которого соединен с входом вентильного преобразователя 2. Обмотка 8 возбуждения электродвигателя соединена с тиристорным возбудителем 9. Устройство содержит также последовательно соединенные узел 10 сравнения, регулятор 11 ЭДС, узел 12 сравнения и регулято( 13 тока возбуждения, выход которого подключен к входу тиристорного возбудителя 9, и, кроме то го, датчик 1 напряжения, датчик 15 тока якоря, датчик 16 тока возбуждения, датчик 17 скорости и датчик 18 ЭДС. Выходы датчиков связаны с входами соответствующих регуляторов. Параллельно якорной цепи электродвигателя подключена цепь из последовательно соединенных резистора 19 динамического торможения и коммутатора 20. Выходы блока 21 выбора режимов работы электродвигателя подключены к задатчику 3 интенсивности, к коммутатору 20, к входу узла 10 сравнения и к одному из входов многофункционального блока 22 ограничения, к другим входам котррого подключены датчик 17 скорости, блок 23 задания рекуперр;руемой энергии и выход блока 2k измерения текущего значения рекуперируемой энергии, вход которого подключен к датчикам Н, 15 и 18. Электропривод работает следующим образом. В двигательном режиме с блока 21 на вход задатчика 3 поступает сигнал, пропорциональный заданной частоте вращения. В задатчике 3 интенсивности этот сигнал п()еобразуется в сигнал,, изменяющийся во времени. С выхода задатчика 3 интенсивности сигнал поступает в узел k сравнения, где сравнивается с сигналом обратной связи с выхода датчика 17 скорости. Выявленный разностный сигАал поступает на вход регулятора 5 скорости, а задачу которого входит от:имизация контура частоты вращения. Регулятор 5 выполнен со звеном ограничения, вход, которого соединен с многофункциональным блоком 22 ограничения, на вход которого поступают сигналы с блоков 23 и 2i. При работе в двигательном режиме сигнал с блока 21 переключает многофункциональный блок 22 ограничения, отключая от последнего выход блоков 23 и 2 и -включая внутри него функци- 5 ональный лреобразователь, сигнал с которого,поступая на еход звена ограничения (выхода регулятора 5i ограни- чиаает выход последнего в функции частоты вращения, тем самым ограничи- Ю вая входной сигнал узла 6 сравнения. Это позволяет ограничивать ток якорной цепи в зависимости от частоты вращения, обеспечивая при частотах ниже основной (при полном потоке воз буждения) , ограничение момента, а при частотах, выше основной, - ограничение мощности на валу электродвигателя. На другой вход узла сравнения 6 с выхода датчика 15 тока якорной цепи поступает сигнал обратной связи. Разность этих сигналов поступает на вход регулятора 7 тока якорной цепи. Выходной сигнал с регулятора 7 якорной цепи поступает на вхо силового вентильного преобразователя 2, переводя последний на работу в вы прямительном режиме. Одновременно с выдачей сигнала задания в канал управления током якорной цепи в узел 10 сравнения выдается сигнал задания тока возбуждения. Величину этого сигнала выбирают таким образом,чтобы при частотах ниже основной номинальной частоты вращения электродш гателя, сигнал с датчика 18 ЭДС .был меньше сигнала задания по току возбуждения. Выход, узла 10 сравнения соединен с входом регулятора 11 ЭДС, выполненного интегральным с ограничением. Это позволяет при .частотах,- ниже основной, иметь постоянный сигнал на выходе регулятора 11 ЭДС. Сигнал с выхода регулятора 1.1 ЭДС поступает на вход узла 12 .сравнения, где сравнивается с сигналом обратной связи по току возбуждения, поступающим с датчика 16 тока возбуждения. Выявленный разностный сигнал поступает на вход регулятора 13 тока возбуждения, выходной сигнал с которого поступает на вход тиристорного возбудителя 9, питающего обмотку возбуждения электродвигателя. В тормозном режиме с блока 21 поступают сигналы на коммутатор 20, )оторый подключает резистор 19 динам ческого торможения к якорной цепи 9859 1 электродвигателя 1, на вход многофункционального блока 22 ограничения, к которому подключаются блоки 23 и 2k текущего и заданного значений рекуперируемой мощности: на вход задатчика интенсивности 3 поступает сигнал, пропорциональный величине заданной, частоты вращения, на вход узла 10 сравнения - сигнал, пропорциональный заданному ПОТОКУ возбуждения, Прохождение сигналов по каналам управления тока якорной цепи и цепи возбуждения в двигательных тормозных режимах идентично. Регулирование частоты вращения в режимах торможения осуществляют пу- . тем регулирования энергии, рекуперируемой в сеть. В процессе работы электродвигателя в тормозном режиме механическая энергия преобразуется в тепловую энергию, выделяемую на резисторе 19 динамического торможения, и энергию, рекуперируемую в сеть силовым. вёнтильным преобразователем, работакидим В инверторном режиме. Контроль мощности, рекуперируемой в сеть, осуществляется многофункциональным блоком 22 ограничения, один из входов которого соединён с .блоком 23 заданного значения рекуперируемой мощности , задающим допустимый.уровень ререкуперируемой мощности по условиям режима работы энергетической установки, а другой вход - с блоком 2k текущего значения рекуперируемой мощности. В многофункциональном блоке 22 ограничения сигналы, поступающие с блоков 23 и 24, сравН«1вдются. Как только текущее значение рекуперируемой мощности становится равным до:Пустимому значению, многофункциональный блок 22 ограничения вырабатывает сигнал на ограничение выхода регулятора частоты вращения, что приводит к ограничению количества рекуперируемой энергии. Применение такой системы регулирования является необходимым в тех случаях, когда питание электропривода осуществляется от автономно( энергетической установки ограниченной мощности и применение чисто рекуперативного торможения является неприг; емлемым из-за ограниченного приема сетью рекуперируемой энергии, что вызывае.т либо недоиспользование электропривода по мощности, либо приводит к нарушению работы первичных
798591
двигателей электроэнергетической установки.
Формула изобретения
Электропривод, содержащий электра дбигатель постоянного тока, якорная обмотка которого подключена к вентильному преобразователю, последовательно соединенные задатчик интенсивности, первый узел сравнения, регулятор скорости, второй узел сравнения и регулятор тока якоря, выход которого .подключен к входу вентильного преобразователя,, обмотка возбуждения электродвигателя соединена с тирй-: сторным возбудителем, последовательно соединенные третий узел сравнения, регулятор ЗДС, четвертый узел сравнения и регулятор тока возбуждения, выход которого подключен к входу тиристорного возбудителя,датчики напряжения, тока якоря и возбуждения, скорости и ЭДС ,выходы которых связаны с входами соответствующих регуляторов, параллельно якорной обмотке электродвигателя подключена цепь из последовательно соединенных резис18
тора динамического торможения и коммутатора, отличающийся, тем, что, с целью улучшения энергетических показателей, в него дополнительно введены блок выбора режимов работы электродвигателя, блок задания рекуперируемой энергии, блок измерения текущего значения рекуперируемой энергии, многофункциональный блок ограничения, причем выходы блока выбора режимов работы -, электродвигателя подключены к задатчику интенсивности, к коммутатору, к входу третьего узла сравнения и к одному из входов многофункционального блока ограничения, к другим входам которого подключены датчик скорости, блок задания рекуперируемой энергии и выход блока измерения текущего значения рекуперируемой энергии, вход которого подключен к датчикам тока, напряжени и ЭДС..
Источники информации, принятые во внимание при экспертизе
