(54) АВТОМАТИЗИРОВАННЫЙ ЧЕРТЕЖНЫЙ ПРИБОР КООРДИНАТНОГО ТИПА
1
Изобретение относится к устройствам для кодирования графической информации в прямоугольной системе координат.
Наиболее близким к предлагаемому изобретению является автоматизированный чертежный прибор координатного типа, содержащий установленный на основании планшет, горизонтальную направляющую, расположенную на ней каретку, связанную с вертикальной направляющей, и датчики линейного перемещения направляющих, связанные гибкой передачей 1.
Недостатком данного прибора яьдяется неточность показаний измерительного устройства.
Цель изобретения - повышение точности.
Цель достигается тем, что в автоматизированном чертежном приборе, содержащем установленный на основании планшет, горизонтальную направляющую, расположенную на ней каретку, связанную с вертикальной направляющей, и датчики линейного перемещения направляющих, связанные гибкой передачей, он имеет установленный на основании И-образный лонжерон и закрепленные на нем две вертикальные стойки, горизонтальная направляющая расположена с тыльной стороны планшета и установлена на концах лонжерона, ролики гибкой передачи попарно закреплены на концах стоек, а гибкая связь охватывает ролики в виде восьмерки с центром, совпадающим с центром тяжести каретки, и с верхней и нижней параллельными ветвями, а также тем, что один верхний и один нижний ролики выполнены сдвоенными, а гибкая связь состоит из трех соединенных концами с вертикальной направляющей участков, один из которых охватывает одинарные ролики, а два других .параллельны и охватывают сдвоенные ролики.
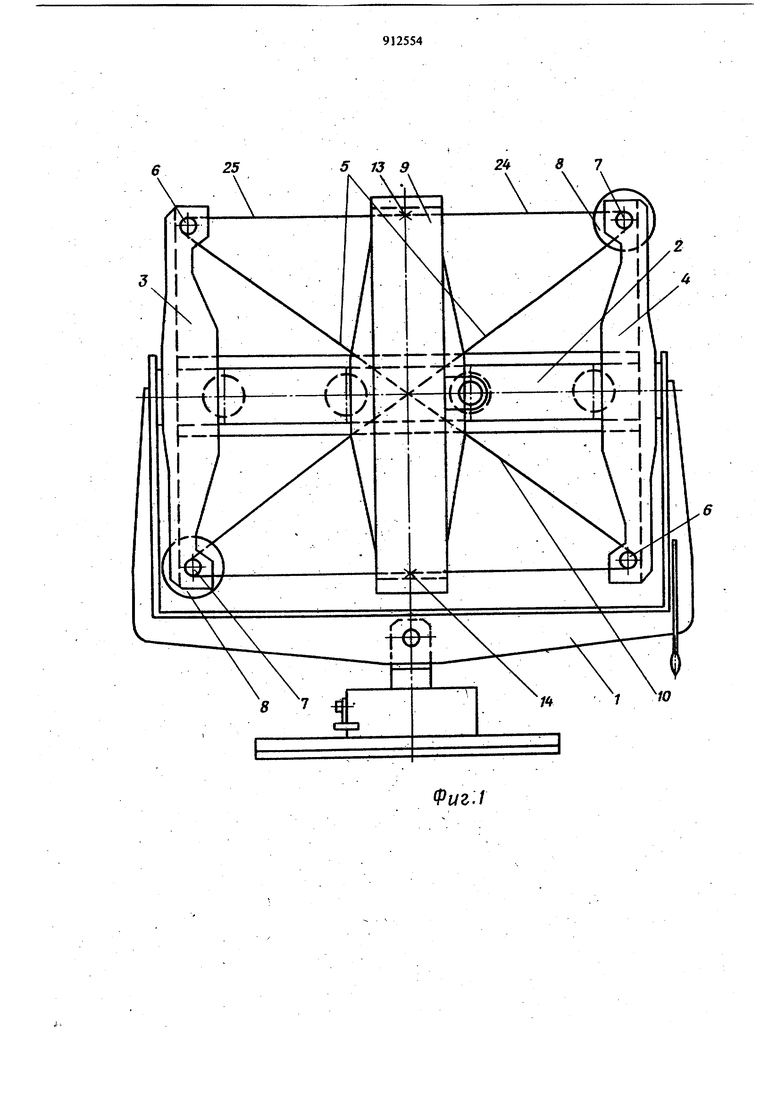
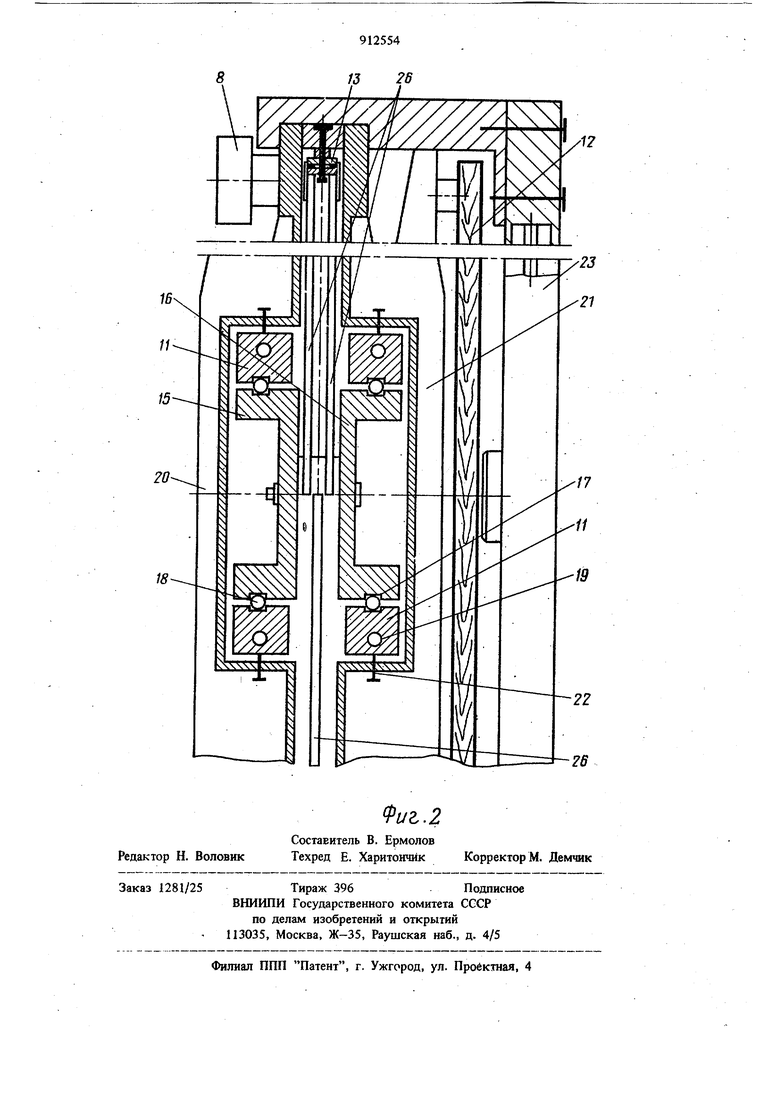
На фиг. 1 изображен автоматизированный чертежный прибор крордииатного типа (без плашаета), общий вид на фиг. 2 - разрез по вертикальной плоскости прибора на фиг. 1 (с плашиетом).
Автоматизированный чертежный прибор координатного типа содержит основание 1 с Иобразным лонжероном, служащим для крепле кия иа ием чертежного прибора, содержащего направляющую 2 две вертикальные балки 3 и 4, закрепленные на направляющей, гиб39кую замкн тую кинематическую цепь 5, выполнеШую в виде восьмерки, дв}ос одинарных роликов 6 и двух двойных шкивов 7 с находящимися на последних на одной оси двух датчиков углового положения 8, траверс 9 с визиром 10, которая может перемещаться в горизонтальном направлении по направляющей 2 на каретках 11 (фиг. 2) планшета 12. 8верхней и нижних точках 13 и 14 траверса 9скрепляется с гибкой замкнутой кинематической цепью 5. Горизонтальная направляющая 2 имеет левый и правый швеллера 15 и 16, скрепленные между собой дистанцерами. В 11шеллерах 15 и 16 выполнены с необходимой точностью канав ки 17, служащие для размещения в них шариков 18. В каретках 11 смонтированы механизмы 19 возврата шариков. -Траверса 9 выполнена в виде двух вертика ных стоек 20 и 21, расположенных с тыльной стороны планшета, на которых находится каретка 11, устанавливаемая через регулировочные винты 22 и измерительная линейка 23, расположенная на передней.части планшета жестко связанная со стойками в верхней и нижней точках кронштейнами. Гибкая замкнутая кинематическая цепь 5 состоит из двух Z-образных звеньев 24 и 25, причем звено 24 включает в себя два отреза ленты 26, а звено 25 - один отрезов ленты 2 находящейся между первыми двумя, все три отреза ленты лежат в трех плоскостях на рав-ном расстоянии друг от друга. Прибор работает следующим образом. При работе оператор прикрепляет чертеж на планшет 12 точки,линии которых необходимо преобразовать в код прямо)тольных коордиНат. Удерживая в руках визир 10, оператор перемещает траверсу 9 над плоскостью планшета 12 вдоль горизонтальной направляющей 2 и осуществляет позицирование координатных точек на чертеже. За счет кинематической цепи эти перемещения приводят во вращения датщпси углового положения по оси X к у, которые И указывают координаты этих.точек или всей линии чертежа. Чертеж преобразуется в серии координатных точек считываемых с датчиков, по которым можно воспроизвести заново этот чертеж. Центральное расположение горизонтальной направляющей относительно траверсы позволяет уменьшить ошибку ДХ. Базирование вертикальных балок, несущих ролики гибкого кинематического звена по центрально-расположенной направляющей, значительно облегчает монтаж и настройку всей системы. Формула изобретения 1.Автоматизированный чертежный прибор координатного типа, содержащий установленный на основании планщет, горизонтальную направляющую, расположенную на ней каретку, связанную с вертикальной направляющей, и датчики линейного перемещения направляющих, связанные гибкой передачей, отличающийся тем, что, с целью повышения точности, он имеет установленньш на основании И-образный лонжерон и закрепленные на нем две вертикальные стойки, горизонтальная направляющая расположена с тыльной стороны планшета и установлена на концах лонжерона, ролики гибкой передачи попарно закреплены на концах стоек, а гибкая связь охватывает ролики в виде восьмерки с центром совпадающие с центром тяжести каретки, и с верхней и нижней параллельными ветвями. 2.Прибор по п. 1, .о т л и ч а ю щ и и с я тем, что один верхний и один нижний ролики выполнены сдвоенными, а гибкая с)зязь состоит из трех соединенных концами с вертикальной направляющей участков, один из которых охватывает одинарные ролики, а два других параллельны и охватывают сдвоенные ролики. Источники информации, принятые во внимание при зкспертизе 1. Авторское свидетельство СССР N 765027, кл. В 43 L 13/00, 15.05.78.
Фиг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Координатограф | 1981 |
|
SU963892A1 |
| Чертежный прибор координатного типа | 1988 |
|
SU1729820A1 |
| Фотоэлектрический датчик координатографа | 1980 |
|
SU1010637A1 |
| Чертежный прибор | 1989 |
|
SU1733273A1 |
| Устройство для перемещения чертежной каретки | 1980 |
|
SU901071A1 |
| Чертежный прибор | 1990 |
|
SU1729819A1 |
| Чертежный прибор | 1974 |
|
SU592346A3 |
| Устройство ввода-вывода графической информации | 1980 |
|
SU905648A1 |
| МАТЕМАТИЧЕСКИЙ ПРИБОР | 1991 |
|
RU2022802C1 |
| Автоматизированный чертежный прибор координатного типа | 1978 |
|
SU765027A1 |