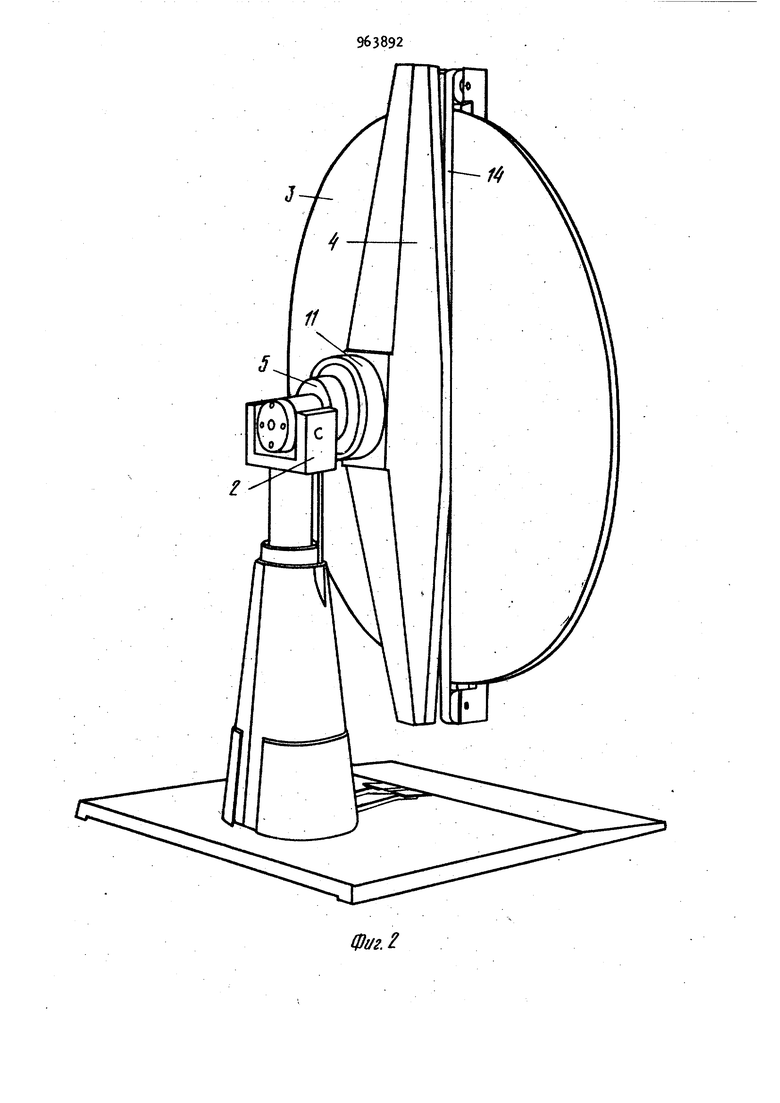
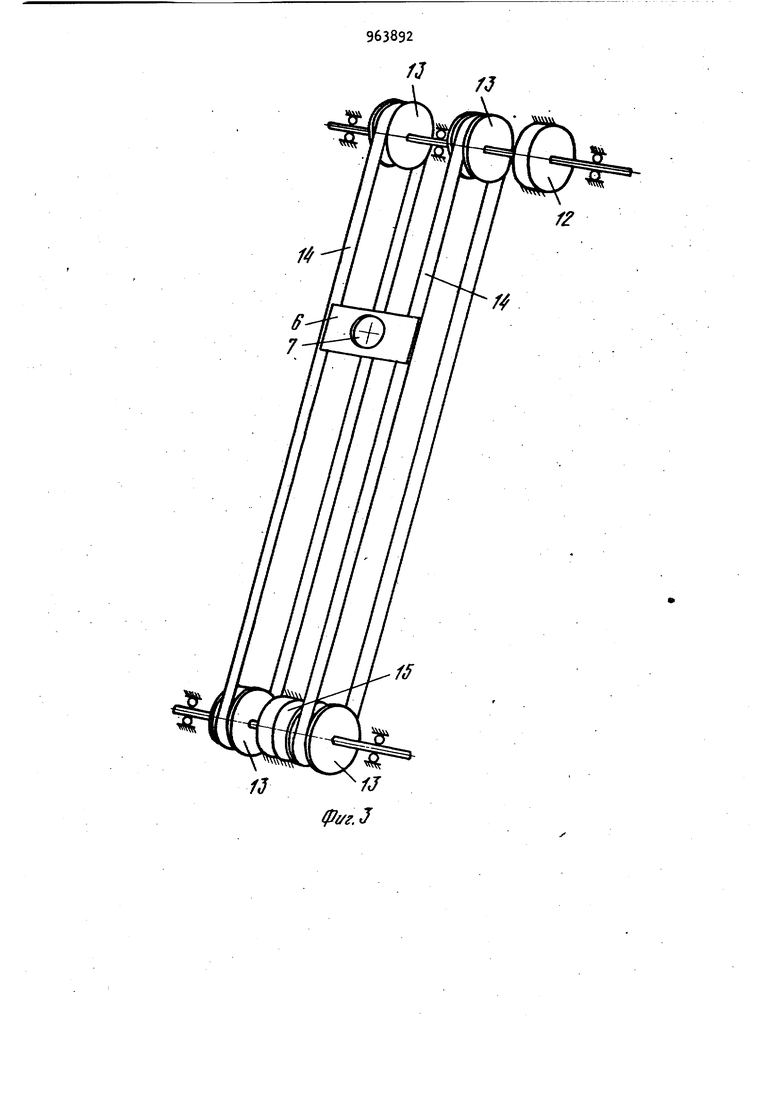
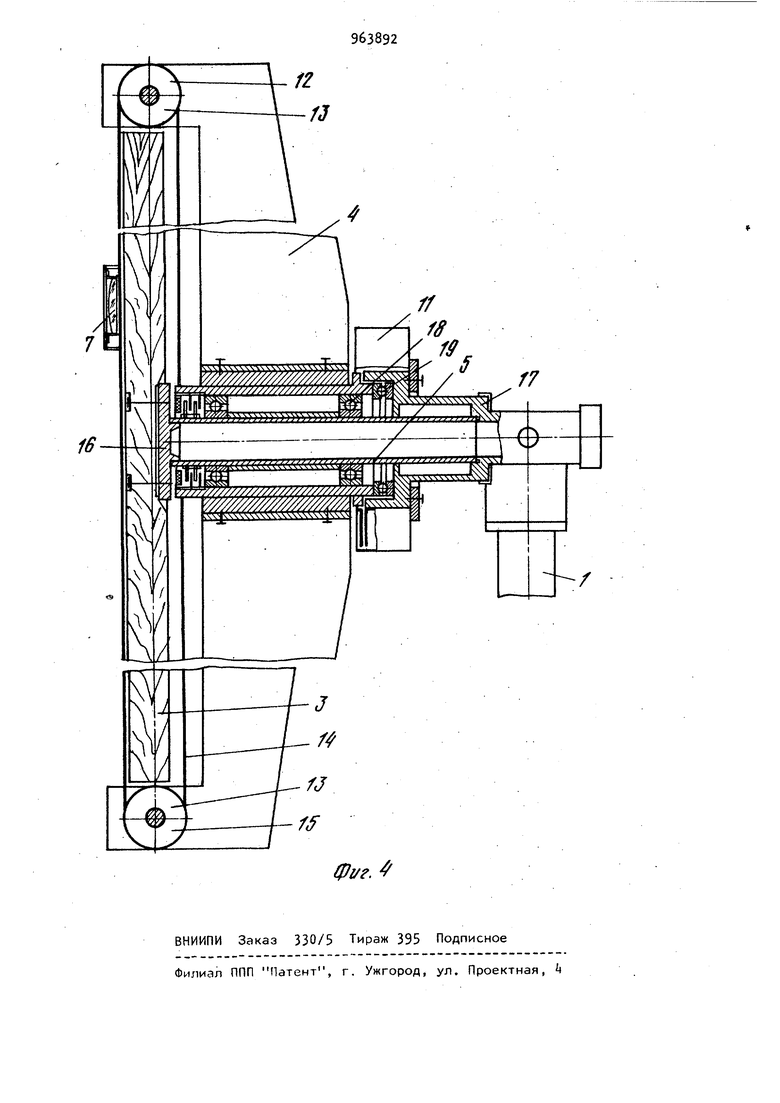
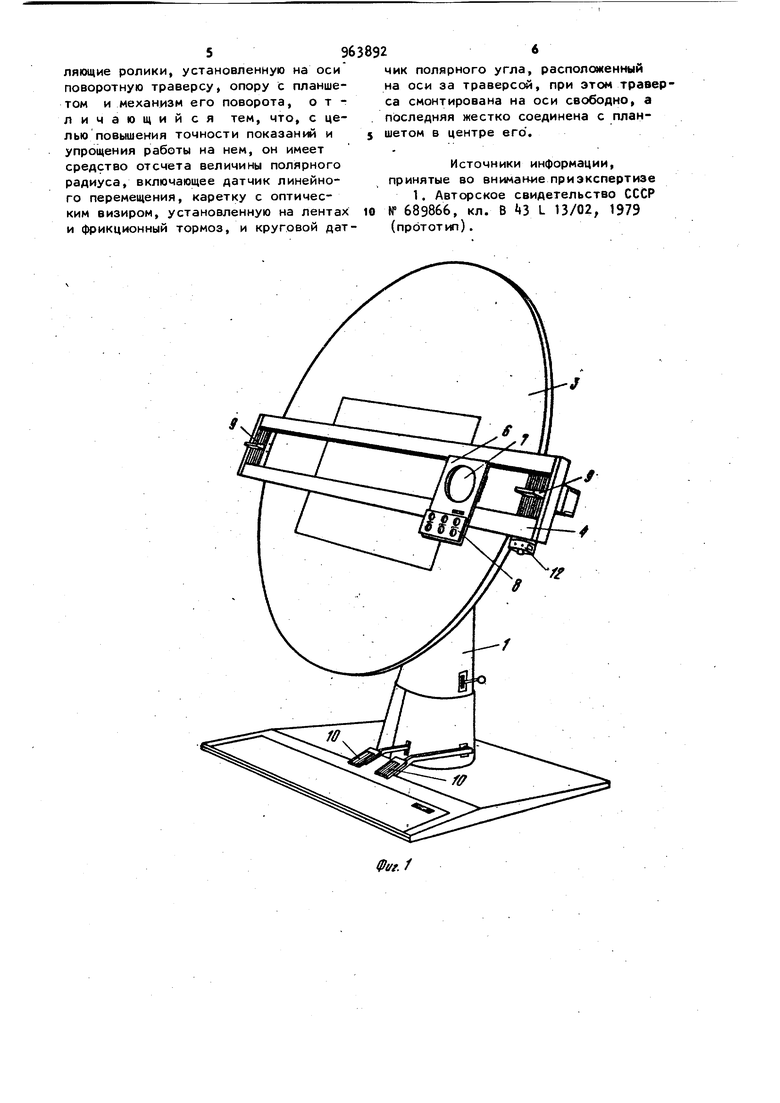
Изобретение относится к устройст вам ДЛЯ кодирования графической ин формации в полярной системе координат . Известен координатограф для кодирования графической информации в сме шанной системе координат, т.е. испол зуя прямоугольную и пблярную систему координат одновременно. Этот прибор имеет установленную на оси поворотную траверсу, содержащую нижнюю горизонтальную направляющую и две боковые вертикальные направляющие с каретками, жестко соединенные с рамой, линейки, выполненные в виде бес конечных многослойных лент, одна из которых расположена на роликах вертикальных кареток, а другая - на роликах горизонтальных кареток, установленный на опоре планшет, выполненный в виде круга с механизмом его поворота в горизонтальной плоскости. В данном приборе может кодироваться графическая информация как в прямоугольной системе координат, так и в полярных 1. Недостатком известной конструкции является сложность его применения для кодирования графической информации в полярной системе координат, так как конечный результат можно определить только визуально по лимбу на окружности диска при помощи линейки, приложенной к центру пересечения линеек и измеряемой точки. Точность такого отсчета невелика и будет расти прямо пропорционально диаметру планшета. Целью изобретения является повышение точности показаний координатографа и упрощение работы на нем. Это достигается тем, что в координатографе, содержащем замкнутые гибкие ленты, охватывающие направляющие ролики, установленную на оси пово ротную траверсу, опору с планшетом . и механизм .его поворота, имеется средство отсчета величины полярного ра-. 39 диуса, включающее датчик линейного перемещения, каретку с оптическим визиром, установленную ;на лентах и фрикционный тормоз, и круговой датчик полярного угла, расположенный на оси за траверсой, при этом траве са смонтирована на оси свободно, а последняя жестко соединена с планшетом в центре его, На фиг. 1 и 2 изображен координа тограф, вид спереди и сзади при раз личных углах наклона планшета; на фиг. 3 показана кинематическая схема перемещения каретки с оптическим визиромj на фиг. - вертикальный разрез координатографа на поворотной траверсе. К домкрату 1 (фиг. 1, 2) прикре пляется через фрикционы в вилке 2 планшет 3. Поворотная траверса k ус тановлена на оси 5- На траверсе k расположена подвижная каретка 6 . с оптическим визиром 7, пульт управления 8 и ручки поворота траверсы 9. Педали 10 служат для управлен механизмами подъема и наклона планшета, гидродомкратами. В задней час траверсы И размещены круговой датчи полярного угла 11, которым может бы например, индуктосин. Средство отсчета величины полярног;о радиуса (фиг. 3) включает датч линейного перемещения 12, установле ный соосно с направляющими роликами 13, охватываемыми двумя параллел ными замкнутыми стальными лентами 1, между которыми закреплена подвижная каретка 6 с оптическим визиром 7. Оси роликов 13.расположены так, чтопередняя часть ленты с оптическим визиром 7 максимально приближена к поверхности планшета 3 с целью уменьшения ошибки позициониро вания. Для фиксации каретки 6 в определенном положении служит электро магнитный фрикционный тормоз 15 управляемый с пульта 8. Планшет 3 (фиг. l) закрепляется через фланец 16 к неподвижной оси 5. Поворотная траверса k установлена на неподвижной оси 5, выполненной в виде трубы, запрессованной во втулки 17 через два радиальных 18 и один упорный подшипник 19. При такой конструкции узла вращения траверса k может свободно вращаться вокруг неподвижной оси 17. Координатограф имеет электромагнитный фрикционный тормоз 20, фиксирующий траверсу в определенном выбранном положении, управляемый сигналом с пульта 8. В случае необходимости полярная система координат может быть преобразована в прямоугольную в соответствии с выражени X pC09a rpSIHo, где ))- полярный радиус; с - полярный угол, образованный осью подвижной каретки, проходящей через оптический визир и выбранной нулевой отметкой на планшете, либо с помощью электронной схемы, следящей за относительным отсчетом импульсов датчика полярного угла. Устройство рабтает следующим образом. Оператор при помощи ручек поворота траверсы 9 ловит в перекрестке оптического визира 7 ту точку на чертеже,, прикрепленном к планшету, которая подлежит квантованию, предварительно нажав кнопку на пульте управления 8 для снятия напряжения с тормозов фиксации траверсы и каретки, В момент поиска точки квантования вместе с поворотной траверсой вращается круговой датчик полярного угла и происходит отсчет полярного угла d,, а датчиком линейного перемещения 12 отсчет полярного радиуса J3 . Таким образом, датчики автоматически выдают данные о координатах выбранной на чертеже точки. Вследствие того, что начало координат совмещено с центром планшета, то при переходе оптического визира 7 через центр планшета появляется возможность с помощью электронной схемы осуществить сброс предыдущих показаний датчика линейного перемещения 12 до нуля и тем.самым ликвит дироватьнакопленную ошибку измерений полярного радиуса р. Предлагаемый координатограф прост в работе и позволяет повысить точ- ; ность показаний, уменьшив ошибку вдвое по сравнению с известной конструкцией. Формула изобретения Координатографj содержащий замкнутые гибкие ленты, охватывающие направляющие ролики, установленную на оси поворотную траверсу, опору с планшетом и механизм его поворота, отличающийся тем, что, с це лью повышения точности показаний и упрощения работы на нем, он имеет средство отсчета величины полярного радиуса, включающее датчик линейного перемещения, каретку с оптическим визиром, установленную на лентах и фрикционный тормоз, и круговой дату
чик полярного угла, расположенный на оси за траверсой, при этом траверса смонтирована на оси свободно, а последняя жестко соединена с планшетом в центре его .
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 689866, кл. В ЦЗ L 13/02, 1979 (прототип).
Фи2.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический датчик координатографа | 1980 |
|
SU1010637A1 |
| Автоматизированный чертежный прибор координатного типа | 1980 |
|
SU912554A1 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 1999 |
|
RU2171448C2 |
| Графопостроитель | 1987 |
|
SU1837337A1 |
| Механический интегратор | 1982 |
|
SU1034047A1 |
| Устройство для считывания графической информации | 1974 |
|
SU524204A1 |
| Стенд для испытания системы управления намоточных станков | 1987 |
|
SU1483500A1 |
| ГРАФО-АНАЛИТИЧЕСКИЙ ДЕШИФРАТОР | 1973 |
|
SU368617A1 |
| Устройство ввода-вывода графической информации | 1980 |
|
SU905648A1 |
| Фотограмметрический прибор | 1990 |
|
SU1778525A1 |