Изобретение относится к чертежным
приборам.
Известен, механизм для перемещения кареток, сочетающий жесткие направляющие с гибким кинематическим звеном. Приведенное устройство для перемещения некоторой точки относительно плоскости посредством крестового суппорта, который несет чертежный штифт или обрабатывающий инструмент, осуществляется в каждом координатном направлении посредством канатной тяги с индивидуальными приводами, в сочетании с гидравлическими устройствами. Точность перемещения суппорта здесь зависит от точности монтажа всего прибора, как, например, параллельность жестких направляющих и соответствующих им гибких звеньев, а также жесткости самих гибких звеньев в сборе l
Известное устройство обладает недостаточной точностью работы.
Цель изобретения - повышение точности работы.
Поставленная цель достигается тем, что в устройстве,содержащем расположенные на основании ролики и гибкую ленту, ролики расположены на противоположных концах основания во взаимоперпендикулярных плоскостях, а гибкая лента охватывает каждую пару противоположных роликов, лежащих в одной плоскости, образуя замкнутые контуры, при этом каретка расположена в средней части основания и соединена с каждым ленточным контуром.
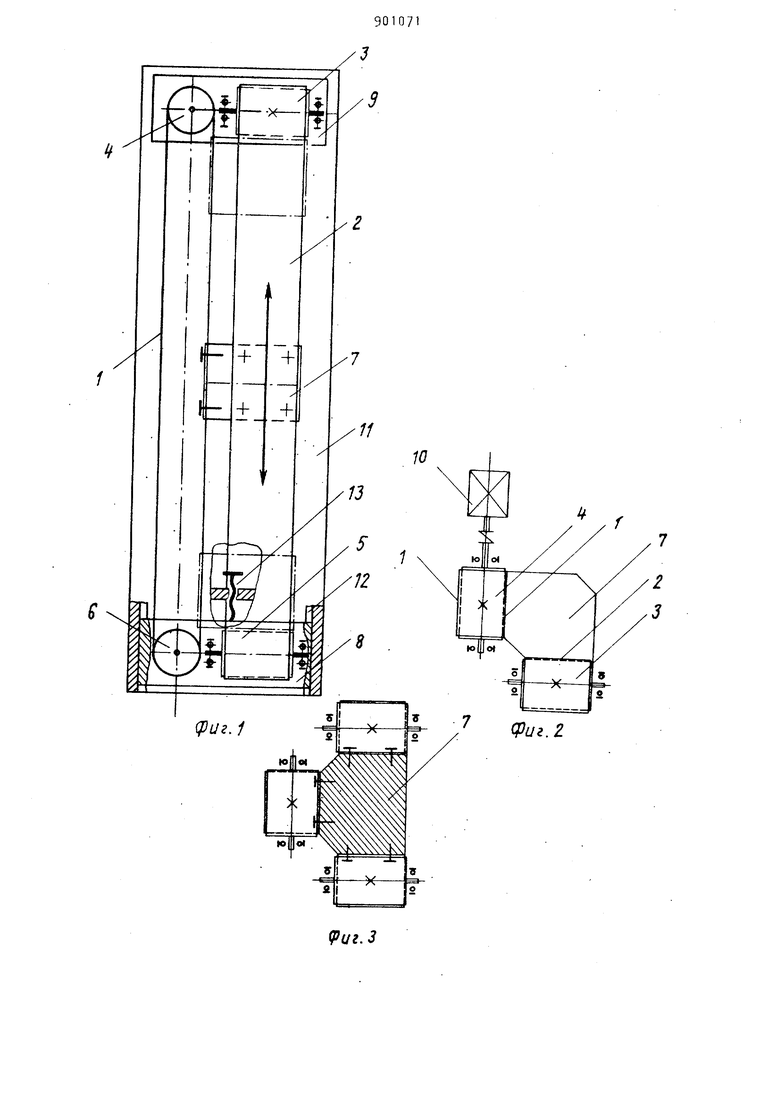
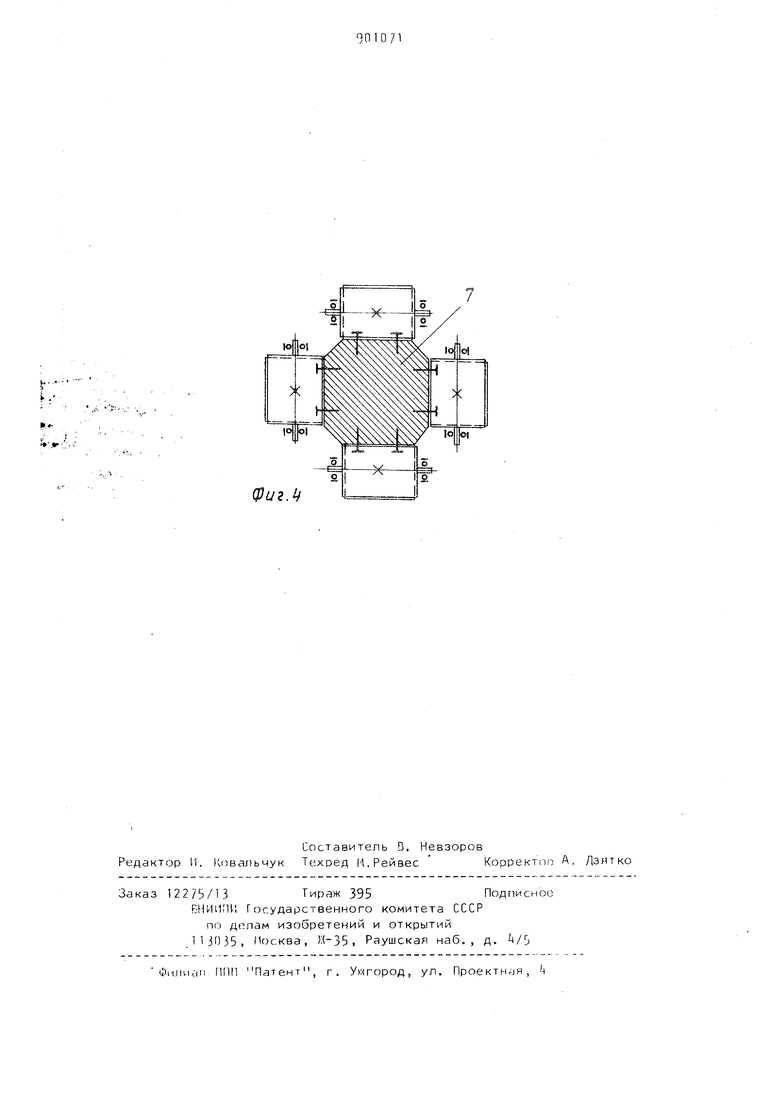
На фиг. 1 изображено устройство перемещения каретки, вид сверху(двухконтурный вариант ; на фиг. 2 - то же, вид в плане; на фиг. 3 - то же, трехконтурный вариант; на фиг. - то же, четырехконтурный вариант.
Устройство для перемещения чертежной каретки содержит две гибких замкнутых по контуру ленты 1 и 2, расположенные в поперечном сечении под углом Обе ленты охватывают ролики 3i и 5.6. Оси охватываемых лентами роликов 3 и 5 перпендикулярны соответственно осям роликов k и 6 Обе ленты 1 и 2 скреплены в месте расположения каретки 7. Каждая пара роликов установлена на отдельных кронштейнах 8 и 9 На ролике рас положен датчик 10 углового перемещения. Вся направляющая, включаклцая ролики 3 6, охватывающие их ленты 1 и 2, кронштейны 8 и 9 смонтированы на жестком каркасе 11, в одной из сторон которого выполнены пазы 12, е которых может перемещаться нижний кронштейн 8. В конструкцию направляющей такого типа входит также механизм для натяжения лент 13, которы выполненный в виде винта либо в виде гидроцилиндра, пневмоцилиндра и других известных средств натяжения. При работе перемещают каретку над основанием, осуществ-ляя тем самым по зиционирование координатных точек на оригинале. 9 14 Предлагаемая конструкция позволяет избежать необходимости использования жестких направляющих, уменьшить вес устройства и повысить точность прибора. Формула изобретения Устройство для перемещения чертежной каретки, содержащее расположенные на основании ролики и гибкую ленту, отличающееся тем, что, с целью повышения точности работы, ролики расположены на противоположных концах основания во взаимно перпендикулярных плоскостях, а гибкая лента охватывает каждую пару противоположных роликов, лежащих в одной плоскости-, образуя замкнутые контуры, при этом каретка расположена в средней части основания и соединена с каждым ленточным контуром. Источники информации, принятые во внимание при экспертизе К Патент ФРГ If 1 486927, кл. В 43 L 13/00 . 1966.
ч.
(риг,
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный чертежный прибор координатного типа | 1980 |
|
SU912554A1 |
| Чертежный прибор координатного типа | 1988 |
|
SU1729820A1 |
| Чертежный прибор | 1989 |
|
SU1733273A1 |
| СТОПОРНЫЙ МЕХАНИЗМ ДЛЯ МНОГОЛЕНТОЧНОГО ШЛИФОВАЛЬНОГО СТАНКА | 1993 |
|
RU2118586C1 |
| Вакуумный координатный столик | 1990 |
|
SU1798949A1 |
| Устройство для обработки деталей сложной формы | 1978 |
|
SU742038A1 |
| ШЛИФОВАЛЬНЫЙ СТАНОК С МНОЖЕСТВОМ ПАРАЛЛЕЛЬНЫХ АБРАЗИВНЫХ ЛЕНТ ДЛЯ ОДНОВРЕМЕННОГО ШЛИФОВАНИЯ ПОВЕРХНОСТЕЙ ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ | 1993 |
|
RU2116880C1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Автоматизированный чертежный прибор координатного типа | 1978 |
|
SU765027A1 |
| Чертежный станок | 1986 |
|
SU1553043A1 |