(54) ПОДЪЕМНАЯ УСТАНОВКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемная установка | 1978 |
|
SU779233A1 |
| ШАХТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 2013 |
|
RU2522585C1 |
| ШАХТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 2012 |
|
RU2513438C1 |
| МНОГОКАНАТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 1996 |
|
RU2127218C1 |
| ПОДЪЕМНАЯ УСТАНОВКА | 2016 |
|
RU2634602C1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1969 |
|
SU238941A1 |
| МОТОЛЕБЕДКА | 2011 |
|
RU2489345C1 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186909C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ТЯГОВОГО УСИЛИЯ (ВАРИАНТЫ) | 2006 |
|
RU2351532C2 |
1
Изобретение относится к подъемнотранспортному, машиностроению, в частности к подъемным установкам-, предназначенным, преимущественно, для глубоких шахт с вертикальными стволами.
Известна подъемная установка, содержаш.ая грузонесуш.ий сосуд с ходовыми колесами, установленными в вертикальных направляющих, связанные посредством гибких тяговых органов с грузонесущим сосудом приводные барабаны с фрикционным механизмом подъема, состоящим из двух рычагов, на одном конце каждого из которых смонтированы охватывающие направляющие приводные ролики 1.
Недостатком данной подъемной установки является то, что необходимо, по крайней мере, не менее трех приводов с электродвигателями, причем размещение на крйще подъемного сосуда приводных барабанов с электродвигателем увеличивает вес порожнего сосуда, а следовательно, уменьшает вес поднимаемого полезного груза. Кроме того, двигатели на фрикционном механизме подъема работают в поворотно-кратковременном режиме с ПВ не более 50%, т. е.
плохо используется установленная мощность подъемной установки.
Цель изобретения - уменьшение установленной мощности привода подъемной установки и снижение веса порожнего грузонесущего сосуда.
Поставленная цель достигается тем, что в подъемной установке приводные барабаны размещены на другом конце каждого из рычагов, а приводы смонтированы в средней части рычага с возможностью взаимо10действия с приводным барабаном и роликом.
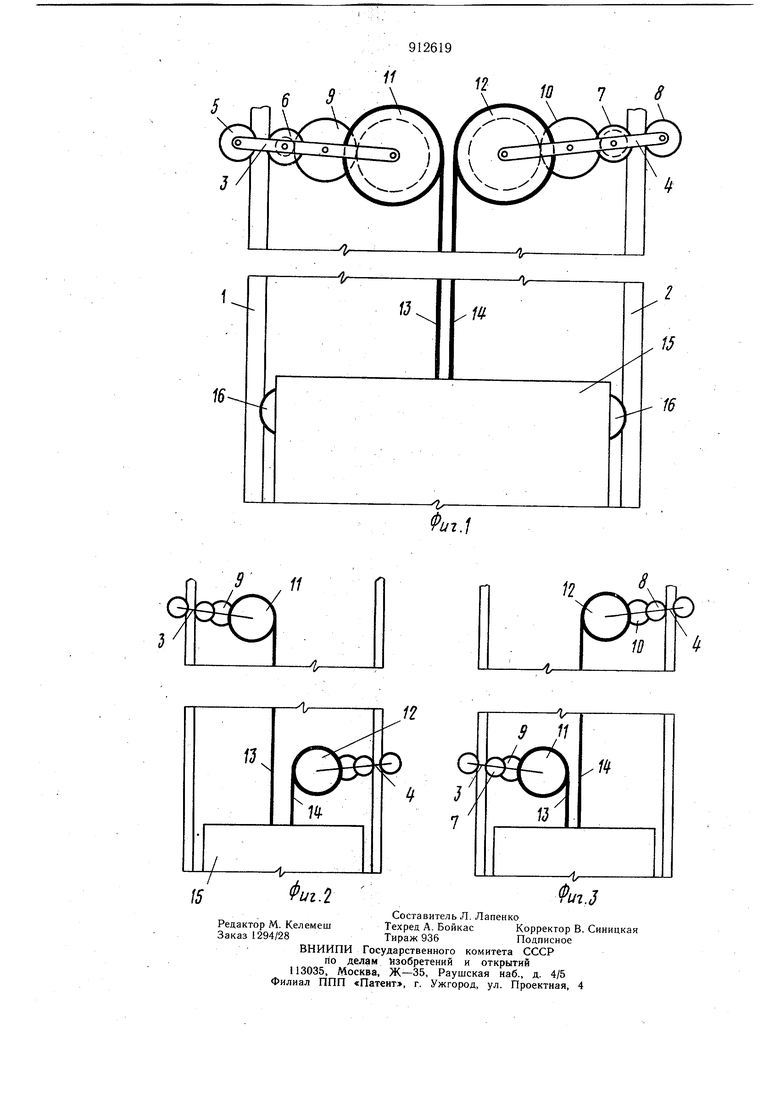
На фиг. 1 изображена предлагаемая подъемная установка, общий вид; на фиг. 2схема, поясняющая процесс подъема гру15 зонесущего сосуда к левому фрикционному механизму подъема; на фиг. 3 - то же, при подъеме к правому фрикционному механизму подъема.
Подъемная установка -содержит перемещаемые по вертикальным направляющим 1 и 2 два фрикционных механизма подъема 3 и 4, каждый из которых опирается на вертикальную направляющую с помощью охватывающих ее приводных роликов 5, 6 и 7, 8. Приводные ролики 6, 7. соединены через редуктор с электродвигателями 9 и 10. На противоположных свободн-ых концах рычагов фрикционных механизмов подъема неподвижно установлены приводные барабаны 11 и 12 с канатами 13 и 14, концы которых запасованы на барабанах. Концы канатов 13 и 14 закреплены неподвижно на крыше грузового сосуда 15, который перемещается по направляющим 1 и 2, опираясь на входные колеса 16. Электродвигатели на фрикционных механизмах подъема питаются током от троллей. Принцип действия подъемной установки заключается в следующем. В тот момент, когда, например, фрикционный механизм подъема 3 находится в верхнем положении (см. фиг. 2), он заторможен и грузовой сосуд 15 с помощью приводного барабана 11 подтягивается к нему. В это время электродвигатель 9 через редуктор присоединен к валу барабана 11 и приводит его во вращение, наматывая канат 13 на барабан. Одновременно фрикционный механизм подъема 4 поднимается на полную длину каната 14. При этом барабан 12 свободно вращается, разматывая канат 14. Величина усилия прижатия приводных роликов 5, 6 и 7, 8 к вертикальным направляющим 1 и 2 зависит от веса консольной части фрикционного механизма с размещенным ча ней приводным барабаном и канатом. Таким образом, в момент достижения сосудом 15 уровня фрикционного механизма подъема 3 второй механизм подъема 4 оказывается на длину каната 14 выще этого уровня (см. фиг. 3). Начинается процесс подъема сосуда к застопоренному фрикционному механизму подъема 4 за счет тягового усилия, создаваемого на барабане 12. Для этого электропривод 10 выводится из кинематической связи с приводным роликом 8 и соединяется с валом барабана 12. При этом канат 14 наматывается на барабан 12, а натяжение каната 13 ослабевает, давая фрикционному механизму подъема 3 подниматься вверх. Для осуществления этого подъема электродвигатель 9 выводится из кинематической связи с приводным барабаном 11 и соединяется с роликом 7. При достижении фрикционным механизмом подъема 3 и сосудом 15 крайних положений процесс повторяется аналогично описанному. Для достижения непрерывности подъема сосуда 15 сматывание, например, каната 14 с барабана 12 происходит с более высокой скоростью чем намотка каната 13. Это обеспечивает превыщение уровня поднимающегося фрикционного механизма подъема 4 над уровнем сосуда 15, равное полной длине размотанного каната 14 еще до прихода сосуда в крайнее верхнее положение у неподвижного фрикционного механизма подъема 3. Поэтому на некотором отрезке пути при подходе к неподвижному механиз му подъема 3 происходит ряд следующих операций: при размотке полной длины каната 14 барабан 12 останавливается; некоторое время механизм подъема 4 продолжает подниматься вверх со скоростью подъема сосуда 15; электродвигатель-10 связывается кинематически с барабаном 12 при сохранении связи и с- роликом 8, т. е. в этот промежуток временимеханизм подъема 4 продолжает подниматься вверх со скоростью, меньщей скорости подъема сосуда 15, и уже началась намотка каната 14 на барабан 12; электродвигатель 10 отсоединяется от ролика 8 и механизм подъема 4 стопорится; некоторое короткое время оба барабана 11 и 12 наматывают канаты; электродвигатель 9 связывается кинематически с роликом 7 и отсоединяется от барабана 11, т. е. подъемный механизм 3 двигается вверх, а барабан 11 свободно вращается в обратную сторону, освобождая канат 13. Предлагаемая подъе.мная установка имеет по сравнению с известной меньщую установленную- мощность электродвигателей и меньщую металлоемкость, так как вместо четырех электродвигателей с редукторами позволяет иметь вдвое меньше. При этом использование электродвигателей более полное, чем в известной установке, за счет обеспечения непрерывной работы электродвигателей то в качестве маршевых приводов, то в качестве тяговых. Кроме того, размещение на крыше грузового сосуда минимума устройств (остаются только лишь подвесные устройства для канатов) позволяет снизить вес порожнего сосуда, а следовательно, повысить вес полезного поднимаемого груза. Формула изобретения Подъемная установка, содержащая грузонесущий сосуд с ходовыми колесами, установленными в вертикальных направляющих, связанные посредством гибких тяговых органов с грузонесущим сосудом приводные барабаны с фрикционным механизмом подъема, состоящим из двух рычагов, на одном конце каждого из которых смонтированы охватывающие направляющие приводные ролики, отличающаяся тем, что, с целью уменьшения установленной мощности и снижения веса сосуда, приводные барабаны размешены на другом конце каждого из рычагов, а приводы смонтированы в средней части рычага с возможностью взаимодействия с барабаном и роликом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2685666/11, В 66 В 9/02, 1978, (прототип).
