(54) ГРУЗОПОДЪЕМНЫЙ КРАН
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН, ПРЕИМУЩЕСТВЕННО ДЛЯ ВОССТАНОВИТЕЛЬНЫХ РАБОТ | 1998 |
|
RU2155155C1 |
| УНИВЕРСАЛЬНЫЙ ТРУБОУКЛАДОЧНЫЙ МОДУЛЬ БОЛОТНЫЙ | 2016 |
|
RU2696706C2 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2006 |
|
RU2320529C1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Грузоподъемное устройство | 1985 |
|
SU1691287A1 |
| СПОСОБ ПОДЪЕМА ГРУЗОВ МОБИЛЬНЫМ КРАНОМ | 2012 |
|
RU2518834C2 |
| Способ подъема груза | 2019 |
|
RU2703097C1 |
| Грузоподъемный кран | 1976 |
|
SU611862A1 |
| Портальный кран | 1990 |
|
SU1779667A1 |
| СБОРНО-РАЗБОРНЫЙ КОНСОЛЬНЫЙ КРАН | 2021 |
|
RU2774693C1 |
Изобретение относится к грузоподъемному оборудованию, а именно к грузоподъемным кранам, снабженным опорной стойкой под стрелу.
Известен грузоподъемный кран, содержащий ходовую часть, на которой см-он- 5 тирована стрела, соединенная со стойкой, установленной на опоре с возможностью поворота относительно ходовой части 1.
Недостатком известного крана являет- io ся то, что он не обеспечивает полноповоротности стрелы и, кроме того, не пригоден для работы на заболоченных, заснеженных и т. п. грунтах.
Цель изобретения - расширение его эксплуатационных возможностей при работе на неуплотненных грунтах, повышение эффективности маневрирования.
Указанная цель достигается .тем, что опора содержит, по крайней мере, один приводной роторно-винтовой движитель. .20
Кроме того, шаг винтовой линии -движителя пропорционален расстоянию от его оси до центра поворота стойки относительно ходовой части.
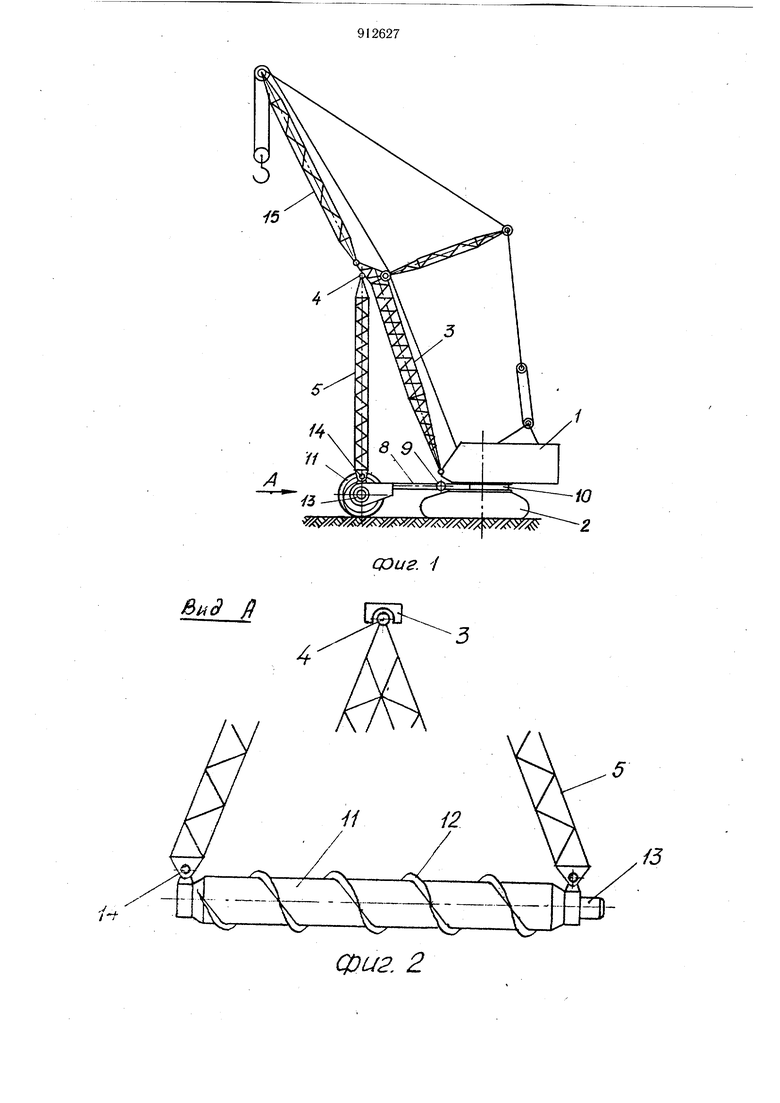
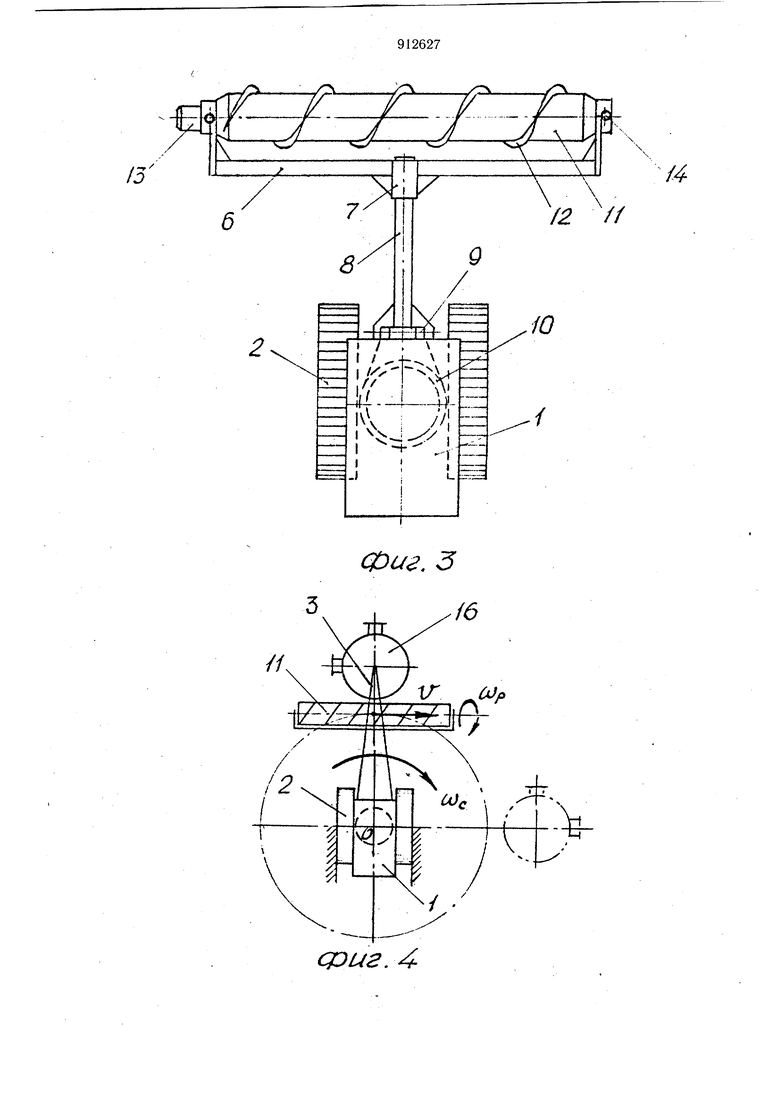
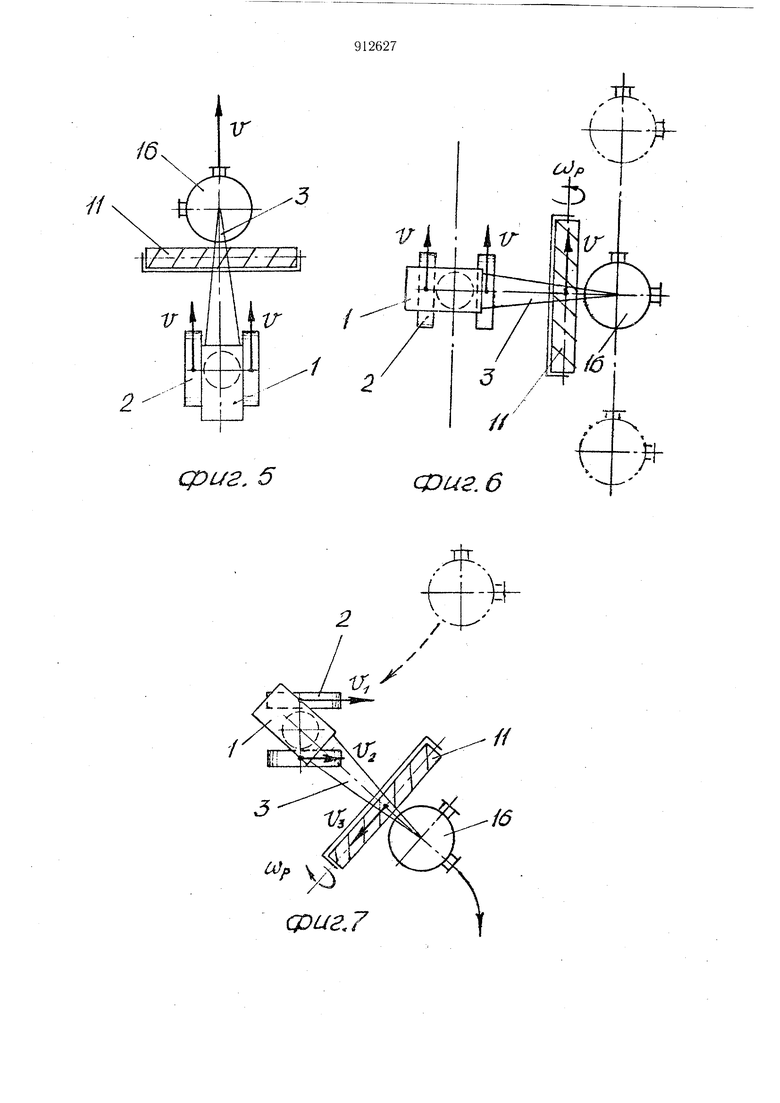
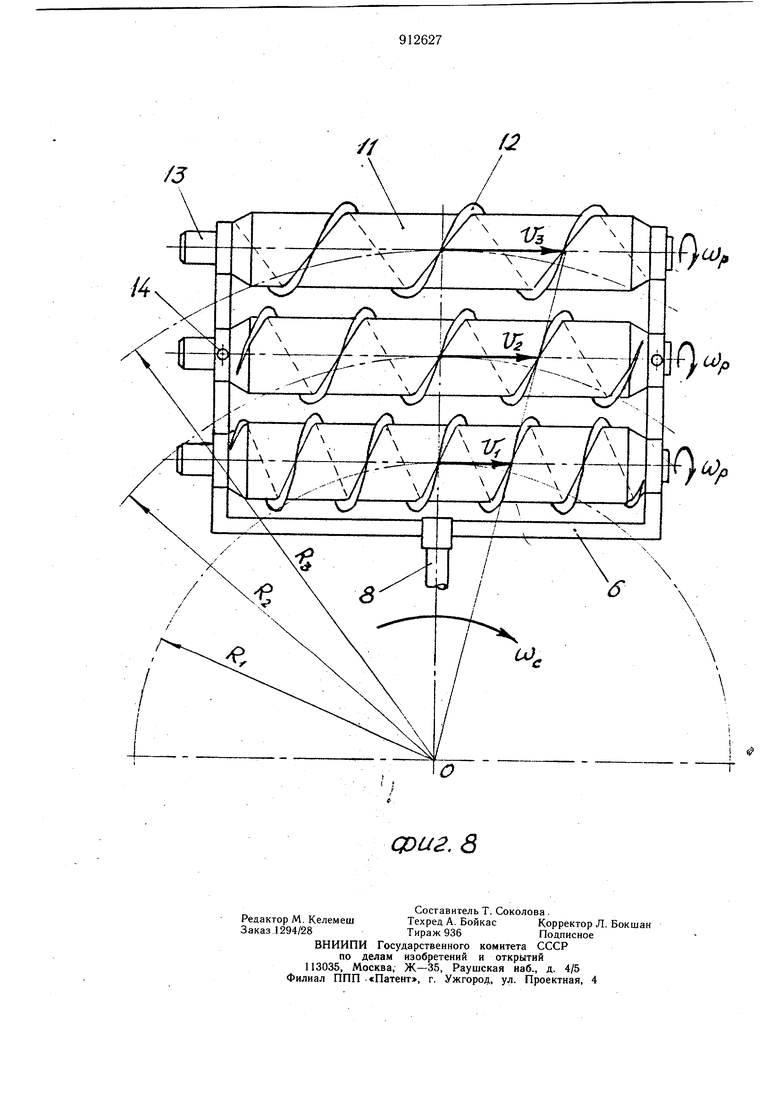
На фиг. 1 представлен предлагаемый грузоподъемный кран, общий вид; на фиг. 2 вид А на фиг. I; на фиг. 3 - то же, вид сверху (условно не показаны стрела, опорная стойка и гусек); на фиг. 4-7- схемы работы крана; на фиг. 8 - вариант установки на опоре нескольких роторновинтовых движителей, вид сверху.
Предлагаемый грузоподъемный кран содержит поворотную платформу 1 на ходовой части 2, стрелу 3, которая оголовком посредством шарового шарнира 4 связана с двуногой стойкой 5, установленной на опоре. Опора имеет поперечную балку 6, на которой установлен роторно-винтовой движитель. Балка 6 соединена посредством осевого шарнира 7 с тягой 8. которая свя.зана горизонтальным шарниро.м 9 с кольцом 10, смонтированным на поворотной платформе с возможностью свободного B Viщения относительно нее. Движитель Bijintj.Tнен в виде цилиндрического ротора 1 1 с винтовыми вые т II а ми 12. Ось ротора II перпендикулярна тяге 8. Движитель может быть изготовлен на месте эксплуатации крана, например, из трубы с привлренным по винтовой линии гребнем. Тележка оснащена индивидуальным приводом движителя, например двигателем 13, который может быть электрическим, гидравлическим или другим, обеспечивающим реверсируемое вращение ротора. Для реверсирования ротора, а также для снижения его. частоты вращения может быть применен также редуктор. Для кинематического отсоединения ротора от двигателя и редуктора и обеспечения его свободного вращения в приводе ротора должна быть предусмотрена муфта. Тележка связана с опорной стойкой щарнирами 14. На стреле установлен гусек 15. Предлагаемый кран работает следующим образом. При необходимости перемещения груза 16 только в подстреловом пространстве кран может работать в стационарном полноповоротном режиме. В этом случае ходовую часть 2 крана затормаживают (фиг. 4), а изменение положения груза в пространстве производят поворотом пластформь 1 со стрелКЪй 3 вокруг вертикальной оси и поворотом гуська 15 вокруг горизонтальной оси. Для поворота стрелы включают двигатель 13, который приводит во вращение ротор с частотой оЗр. За счет тягового усилия, развиваемого ротором и направленного вдоль его оси, он движется со скоростью V по окружности, концентричной кольцу 10, тем самым осуществляя поворот платформы 1 с частотой вращения и . Движущая сила передается платформе от опоры посредством двуногой опорной стойки 5 и стрелы 3. Кинематическая цепь от привода платформы к зубчатому венцу опорно-поворотного круга при этом может быть включена, либо разомкнута. Размыкание цепи целесообразно при работе на слабонесущем или скользком грунте для исключения произвольного сдвига ходовой части 2 реактивным моментом от поворотно-й платформы, так как при вращении платформы только за счет силы тяги роторновинтового движителя реактивного момента не будет. Кольцо 10 при повороте платформы будет следовать за ней, незначительно отставая или опережая ее, в зависимости от направления отклонения стрелы 3 при боковых наклонах стойки 5, вызванных неровностями грунта на пути ротора 11. При необходимости перемещения груза за пределами зоны досягаемости стрелы возможны различные варианты работы крана. На фиг. 5 представлен один из таких вариантов, когда груз перемещают передвижением всего крана вдоль его продольной оси. В этом случае движителям ходо. вой части 2, например гусеницам, сообщают одинаковую частоту вращения и они движутся с одинаковой скоростью V, а ротор 11 муфтой отсоединяют от привода. В результате ротор может свободновращаться и под действием силы тяги, развиваемой гусеницами и передаваемой на опору через кольцо 10 и тягу 8, катится по грунту как ведомое широкопрофильное колесо. На фиг. 6 представлен случай перемещения груза по прямой, параллельной продольной оси крана. Этот вариант работы крана целесообразен, когда необходимо обслуживать протяженный фронт работ и обеспечено свободное пространство для передвижения крана вдоль этого фронта. Тележку устанавливают так, чтобы ось ротора 11 была параллельна продольной оси крана. Приводами движителей ходовой части 2 и опоры добиваются равенства скоростей их поступательного перемещения по грунту и тем самым обеспечивают прямолинейное движение всей системы со скоростью V. На фиг. 7 представлен один из вариантов маневрирования крана с использованием возможности поворота опоры за счет силы тяги ротора 1,1 в одном из двух направлений (изменением направления вращения ротора) и за счет соответствующего регулирования частот вращения движителей ходовой части 2. Благодаря возможности поворачивать опору непосредственно ее движителем, существуют и другие варианты маневрирования крана за счет сложения скоростей движителей ходовой части и опоры (Vi, Vj и УЗ), в т. ч. и при работе крана по варианту, изображенному на фиг. 6. При работе крана на слабонесущем грунте для увеличения опорной поверхности и снижения удельных давлений на грунт число движителей на тележке может быть увеличено. Тележка с несколькими роторновинтовыми движителями представлена на фиг. 8. Наиболее простым вариантом привода нескольких движителей являются групповой привод всех роторов от одного двигателя, либо индивидуальный привод идентичными двигателями. В обоих случаях роторы вращаются с одинаковым числом оборотов, и схема регулирования привода не сложна. Однако при маневрировании опоры (например при работе с круговой зоной обслуживания или при повороте опоры относительно крана в движении) не все движители работают эффективно. Роторы одновременно движутся по окружностям с разными радиусами и проходят за одно время разные пути, т. е. имеют разные скорости перемещения (см. фиг. 8). Поэтому в любой момент времени только один из роторов развивает полную тягу, а другие, двигаясь с пробуксовкой, увеличивают силы сопротивления движению опоры. Для исключения этого необходимо провести параметры каждого ротора в соответствие со ско-. ростью его движения. Определяющим параметром при одинаковой частоте вращения является щаг винтовой линии, т. е. путь, проходимый ротором за один оборот, который можно найти по формуле .4. где S - шаг винтовой линии на i- .ом роторе;Vj -скорость вращения i- pro ротора; Clip - частота вращения роторов. Но скорость перемещения каждого ротора по своей окружности равна Vj a;c-Ri где c«i(. - частота вращения поворотной платформы крана сострелой; Rj - радиус окружности, по которой движется i- ый ротор. Подставляя значение скорости (2) в уравнение (1), находим ;.,/- RIПри одинаковой частоте вращения роторов, равной cjp, можно обозначить через k. Тогда формула (3) примет следующий вид: .3RiW) где k - коэффициент пропорциональности, зависящий от соотнощения частот вращения крана и ротора. Следовател)но, можно указать, что щаг винтовой линии на каждом роторе пропорционален удалению его оси от центра вращения поворотной платформы до центра поворота стойки относительно ходовой части. Выполнив на роторах винтовой гребень с различным щагом по указанной зависимости (4), можно повысить эффективность каждого роторно-винтового движителя за счет исключения пробуксировки и увеличить суммарную тягу. На роторах, наиболее удаленных от центра поворотной платформы и на которцх вследствие увеличенного щага заполнение тела ротора винтовой нарезкой на очень плотное, для повыщения тяги можно делать гребень двух и более заходным. Наличие на тележке ротЬрно-винтовых движителей, способных двигаться в двух взаимно перпендикулярных направлениях, существенно йовыщает маневренность крана и расширяет его эксплуатационные возможности. Кран может работать как в стационарном режиме с круговой зоной обслуживания, так и перемещаться в любом направлении с грузом на крюке. При этом может не соблюдаться обязательное для других стреловых кранов условие расположения стрелы вдоль гусениц. Улучщение маневренности позволяет повысить точность установки груза с минимумом ручных операций, а следовательно, обеспечено повыщение производительности. Кроме того, установленные на опоре роторно-винтовые движители позволяют увеличить площадь опорной поверхности и снизить удельное давление на грунт. В результате повышается проходимость крана, он может применяться на заболоченных и заснеженных грунтах, например при строительстве мелиоративных обьектов или других объектов в труднопроходимых условиях (например в районах Севера, Западной Сибири и др.). Наиболее целесообразно применение предлагаемого крана при строительно-монтажных работах на мелких, разрозненных и удаленных объектах, где экономически не выгодно держать большой парк грузоподъемных средств, а предлагаемый кран может эксплуатироваться как с паспортной, так и с увеличенной грузоподъемностью, не предъявляя особых требований к подготовке грунта. Формула изобретения 1.Грузоподъемный кран, содержащий ходовую часть, на которой смонтирована стрела, соединенная со стойкой, установленной на опоре с возможностью поворота относительно ходовой части, отличающийся тем, что, целью расщирения его эксплуатационных возможностей при работе на неуплотненных грунтах, опора содержит, по крайней мере, один приводной роторновинтовой движитель. 2.Кран по п. 1, отличающийся тем, что, с целью повыщения эффективности маневрирования, шаг винтовой линии движителя пропорционален расстоянию от его оси до центра поворота стойки относительно ходовой части. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 695954, кл. В 66 С 23/36, 1978 (протоBi d
,v /
фи2. 2 Д
2
//
сриг.4
Ю
фие. 3
V
2
CPU2. 5
