Изобретение относится к устройствам для автоматического программного регулиоования процессом копания землеройно-транспортных машин.
Известно устройство для программного регулирования процессом копания бульдозера, которое содержит соединенные трубопроводами насос, гидрораспределитель, силовой цшшндр со штоком, соединенным с отвалом, подводящий и отводящий трубопроводы, соединяющие подпоршневую и надпоршневук полости силовогоц цилиндра с гидрораспределителем, контактный датчик положения поршня, состоящий из трубы-штока, жестко соединенной со штоком поршня силового цилиндра, внутри которой размещены электроконтакты, расположенные по высоте ее с переменным, увеличивающимся кверху трубы-щтока шагом и ролик токосъема, жестко соединенный с силовым цилиндром. В силовом цилиндре выполнена группа отверстий, расположенных с уменьшающимся по высоте ,цилиндра, начиная снизу, шагом. Группа отверстий силового цилиндра соединена группой трубопроводов, снабженнои группой электромагшпгных клапанов с общим отводящим трубопроводом. Надпоршневая полость силового цилиндра соедашена дополнительным трубопроводом, снабженным электромагнитным клапаном, с подводящим трубопроводом, который также имеет электромагнитный клапан, расположенный ниже электромагнитного клапана в дополнительном трубопроводе. Известное устройство содержит генератор импульсов, распределитель импуль10сов, корректирующий блок, соединенные между собой, и дополнительные генератор и распределитель импульсов, соединенные между собой. Распределитель импульсов соединен с группой электромагнитных клапанов. Кроме
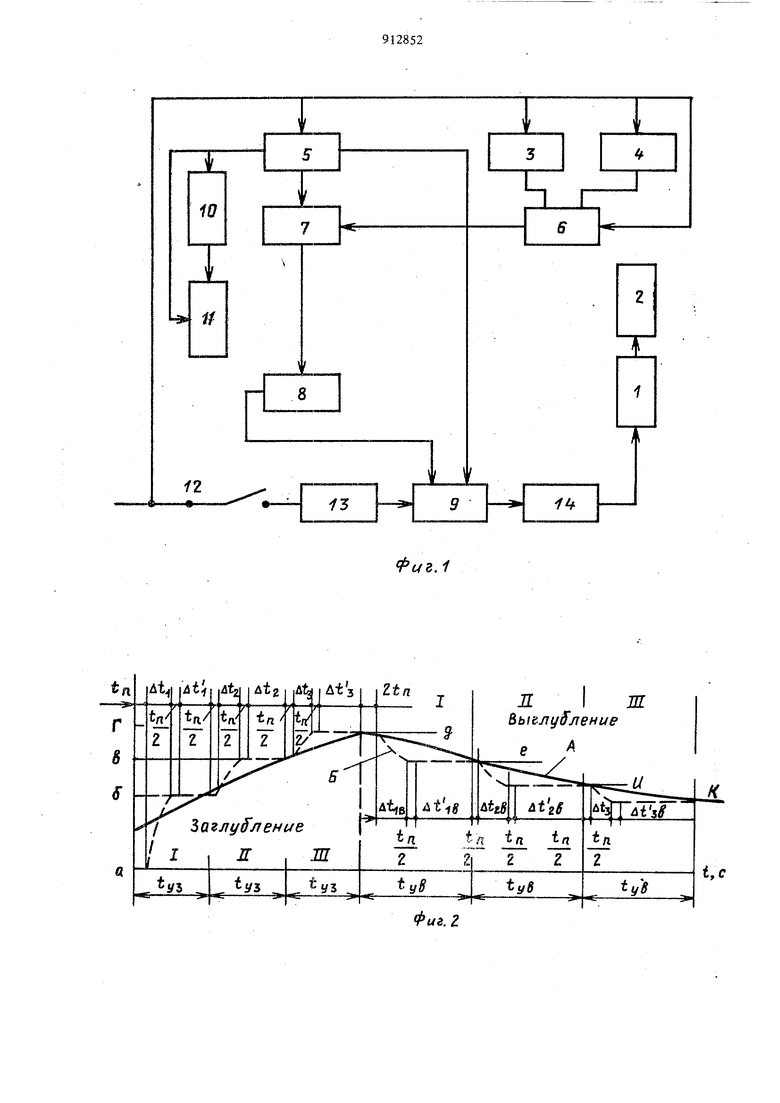
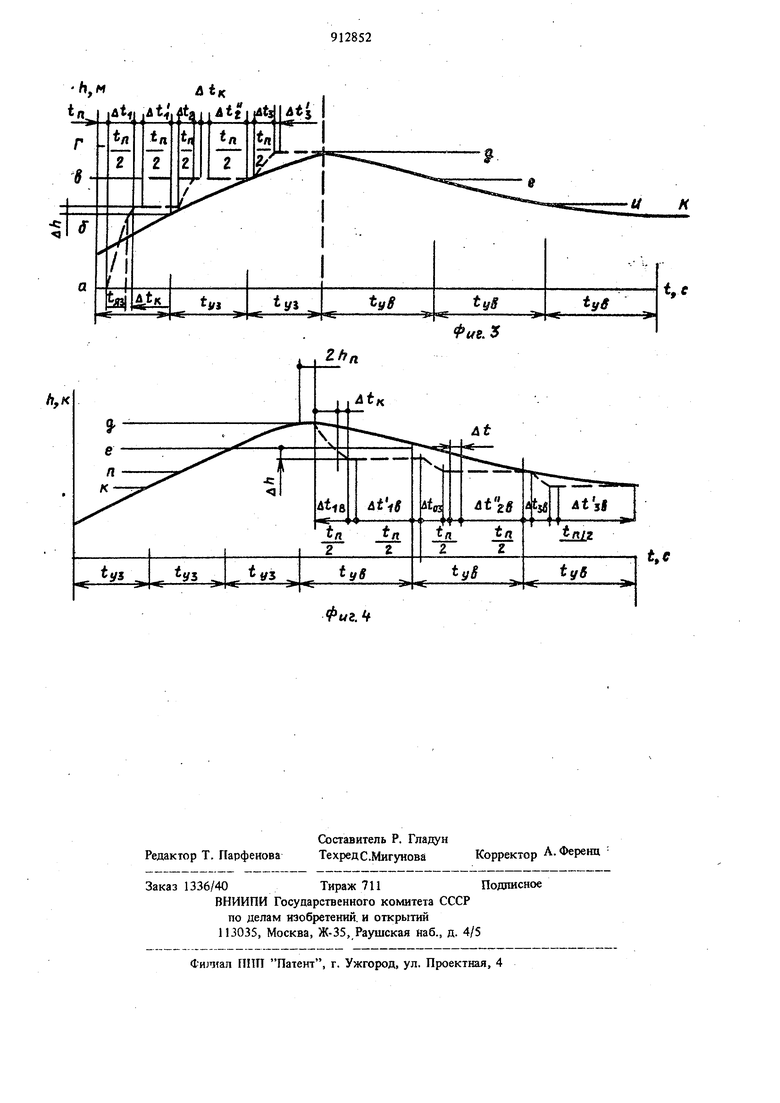
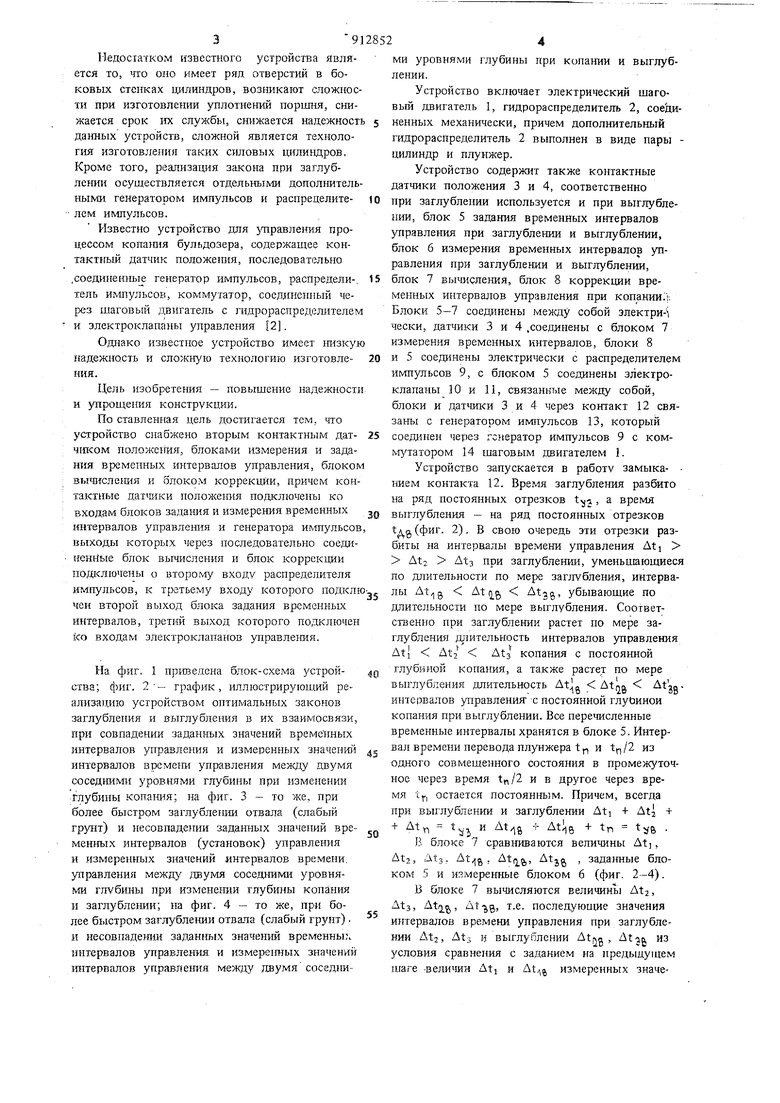
5 того, распределитель нмпульсов соединен с датчиком положения поршня, который связан с выходом дополнительного генератора и с электромагнитным клапаном допошштельного трубопровода, который, в свою очередь, со20единен с выходом дополнительного распреде- лителя импульсов, связанного с генератором импульсов, а также с электроклапаном в подводящем трубопроводе 1. 391285 Недостатком известного устройства является то, что оно имеет ряд отверстий в боковых стенках Щ1линдров, возникают сложности при изготовлении уплотнений поршня, снижается срок их службы, ст жается надежностьs данных устройств, сложной является технология изготовления таких сшювых штоивдров. Кроме того, реализация закона при заглублении осуществляется отдельными дополнительными генератором импульсов и распределите-)о лем импульсов. , Известно устройство для зт1равления процессом копагшя бульдозера, содержап1ее контактный датчик положегош, последовательно ,соединенны е генератор импульсов, распредели-,15 тель имвульсов, коммутатор, соединенный через шаговый двигатель с гидрораспределителем и электроклапаны управления 2. Однако известное устройство имеет Ш1зкую надежность и сложную технологию изготовле-20 кия. Цель изобретения - повышение надежности и упрощения конструкции. По ставленная цель достигается тем. что устройство снабжено вторым контактным дат-25 чшсом положегая, блоками измерения и задаHIM временных интервалов управления, блоком вычислешя и блоком коррекции, причем контактиые датщжи положения подключены ко ; входам блоков задания и измерения времеиных интервалов управления и генератора илшульсов, выходы которых через последовательно соедиHCHi-ibie блок вычисления и блок коррекции подключены о второму входу распределителя импульсов, к третьему входу которого подкл чей второй выход олока задания временных интервалов, третий выход которого подключен ico входам злектроклапанов управления. На фиг, 1 приведена блок-схема устройства; фиг. 2- график, иллюстрирующий реализацию устройством оптимальных законов заглубления и выглубления в их взаимосвязи, при совпадении заданных значений време шых интервалов управления и измеренных значеиш интервалов врсмеш управления между двумя сосед1шми уровнями глубины при изменении глубины копания; на фиг. 3 - то же, при более быстром заглублении отвала (слабый грунт) и несовпадении заданных значений времеиных интервалов (установок) управления и измеренных значений интервалов времени, управления двумя соседними уровнями глубины при изменегши глубины копания и заглублении; на фиг. 4 - то же, при бо лее быстром заглубле1ши отвала (слабый грунт) , и несовпадении заданных значений временных интервалов управления и измеренных значений интервалов управления между даумясоседни4ми уровнями глубины при копании и выглубУстройство включает электрический шаговый двигатель I, гидрораспределитель 2, соединенных механически, причем дополнительный гидрораспределитель 2 выполнен в виде пары цилиндр и плунжер. Устройство содержит также контактные датчики тюложения 3 и 4, соответственно при заглублении используется и при выглублении, блок 5 задания временных интервалов управления при заглублении и выглублении, , 5 измерения временных интервалов управления при заглублеши и выглубленш, блок 7 вы шсления, блок 8 коррекции временных интервалов уттравления при копании.:; Блоки 5-7 соединены между собой электри- чески, датчики 3 и 4 .соединены с блоком 7 измерения временных интервалов, блоки 8 и 5 соединены электрически с распределителем импульсов 9, с блоком 5 соединены злектроклапаны 10 и 11, связанные между собой, блоки и датчики 3 и 4 через контакт 12 связаны с генератором импульсов 13, который соединен чегюз генератор импульсов 9 с комм татором 14 шаговым двигателем 1. Устройство запускается в работу замыка- шем контакта 12. Время заглубления разбито на ряд постоянных отрезков Ц, а время выглублеиия - на ряд постоянных отрезков tдg (фиг. 2). В свою очередь эти отрезки разбиты на интервалы времени управления Ati At2 At3 при заглублении, уменьпгающиеся ло длительности по мере заглубления, интервалы , , Atjg, убывающие по длительности по мере выглубления. Соответственно при заглублении растет по мере заглубления дтштельность интервалов управления At} At2 Atj копания с постоянной глубиной копания, а также растет по мере выглубления длительность tjoинтервалов управления с постоянной глушиои копания при выглублении. Все перечисленные временные интервалы хранятся в блоке 5. Интервал времени перевода плунжера t и из одного совмещенного состояния в промежуточное через время tf,/2 и в другое через остается постояннь м. Причем, всегда мя при выглублении и заглублении At + Ati + + At t. и + п . В блоке 7 сравниваются величины At), Atz, Дт.з, . Atpj, Atjg , зада1шые блоком 5 и измереш-1Ь е блоком 6 (фиг. 2-4). В блоке 7 вычисляются величинь At2, At3, At3, НВ -S- последуюпше значения интервалов времени управления при заглублении Atj, At-, ц вь глублении , At35, из условия сравнения с заданием на предьщущем шаге -величин Ati и At,.j измеренных значеНИИ Ati и и условия постоянства интервалов управления и при обязательном условии tf, const - постоянстве времени перевода плунжера из одного совмещенного состояния в другое. В блоке 8, коррекции вычисляются, значения временных интервалов At| , Ati, Ata при заглублении и , Atij, Atlja привыглублении, т.е. интервалы, при которых копание происходит с постоянной глубиной. Информация о скорректированных и зада.нных временных интервалах управления поступает на распределитель импульсов 9, который осуществляет подзчу -импульсов с генератора на элект ронный коммутатор 14 и на шаговый двигатель 1 в определенной временной последовательности. Распределитель импульсов согласно вычисленным значениям времени Atj и At изменяет программу управления отвалом на последующем щаге управления. В каждом случае алгоритм управления остается одним: задание времени управления при изменении глубины и измерение времени управления при изменении глубины, их сравнение на предыдуI щем шаге, затем вычисление поправки At шш корректирующего значения времени управления пои изменении глубины и также времеЧЯ управлеьшя при копании с постоянной глубиной и реализация этих управлений на последующем шаге. При более быстром выглублении (фиг. 4) измеренное время между точками д и е будет меньше заданного At, . Сравнение At/jg и и вычисление At осуществляется в блоке 7, вычисление скорректированных зна чений Atii и Atljg на последующем шаге производится в блоке 8, а их скорректирован ные значения подаются на распределитель импульсов (фиг. 1). Если -выглубление или заглубление осущест вляется медленнее, что имеет место на плотном грунте, чем заданное по программе, то коррекщ1я программы осуществляется так, что на последующем шаге увеличивают время на изменение глубины копания и изменяют время копания с постоянной глубиной, сохраняя постоянным интервалы управления , и . Если . оказывается больше Ati, заданного при заглублении на предыдущем паге, то на последующем шаге увеличивается вреКм заглубления At на величину At,(, Л(ЪМ - (SflAТо же самое имеет место при вьплублении отвала. В устройстве вычисляются необходимые корректирующие значения времени управления, что практически безинерционно. Другие значения времени управления задаются с помощью электронных устройств. Это позволяет заменить программное пространственно-временное управление программным временным управлением. Таким образом, устройство позволяет осуществить реализащ1ю близкого к оптимальному закона изменения глубины копания. В устройстве упрощается конструкция, система не требует переделки гидропривода. Ф о рмула изобретения Устройство для управления процессом копания бульдозера, содержащее контактный датчик положения, последовательно соединенные генератор импульсов, распределитель импульсов, коммутатор, соединенный через шаговый двигатель с гидрораспределителем, и электроклапаны управлеш1я, отличающеес я тем, что, с целью повышения надежности устройства и упрощения конструкции, оно снабжено вторым контактшЛм датчиком положения, блоками измерения и задания временных интервалов управления, блоком вычисления и блоком коррекции, причем контактные датчики положения подключены к входам блоков задания и измерения временных интервалов управления и генератора импульсов, выходы которых через последовательно соединенные блок вычисления и блок коррекции подключены к второму входу распределителя импульсов, к третьему входу которого подключен второй выход блока задания временных интервалов, третий выход которого подключен к входам электроклапанов управления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке N 2710318/08, кл. Е 02 F 9/20, 1979. 2.Авторское свидетельство СССР по заявке N 2787020/03, кл. Е 02 F 9/20, 1979.
h,.
lAt Atjj taiiAt jjAtJI t} I
.t
t.c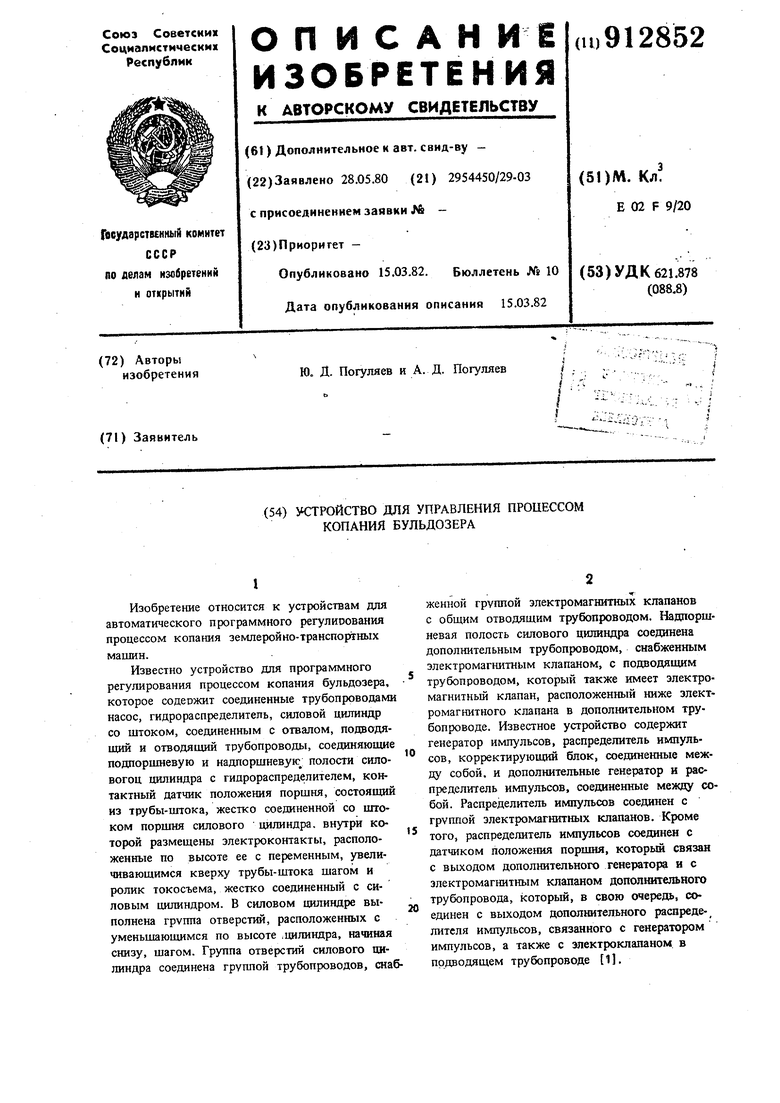
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом копания бульдозером | 1981 |
|
SU1048877A1 |
| Устройство для программного регулирования глубины копания бульдозера | 1977 |
|
SU744078A1 |
| Устройство для программного регулирования процессом копания бульдозера | 1979 |
|
SU932859A1 |
| Устройство для программного регулирования глубины копания бульдозера | 1979 |
|
SU967138A2 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU941503A1 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU953838A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1983 |
|
SU1102869A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1980 |
|
SU910958A1 |
| Устройство для управления шаговымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU838998A1 |