со
Од
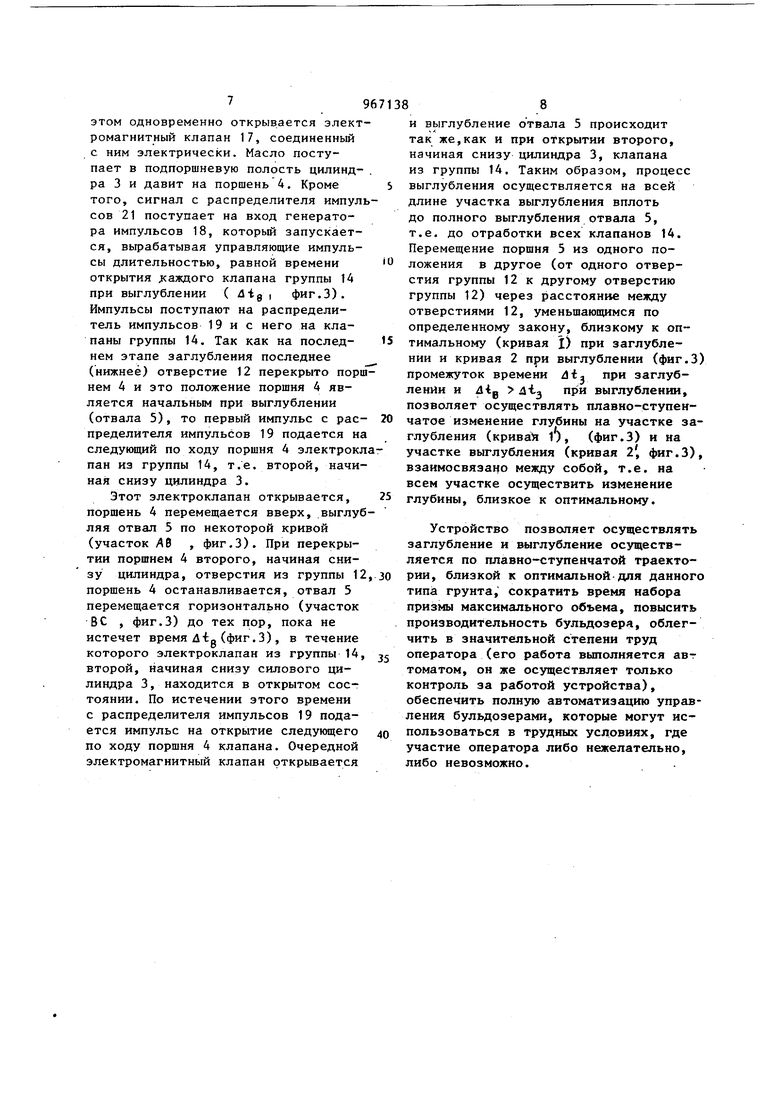
00 00 Изобретение относится к устройст вам, для автоматического программног регулирования процесса копания земл ройно-транспортных машин, преимущественно бульдозеров. Известно уст ройство для автомати ческого программного регулирования глубины копания на участке выглубле ния, содержащее насос, гидрораспределитель и силовые цилиндры с полос тями для подъема и опускания поршня шток которого Соединён с отвалом, п водящий и отводящий трубопроводы, подсоединенные соответственно с под поршневой и надйторщневой полостями силовых цилиндров, контактный датчи положения поршня силового цилиндра, электромагнитные клапаны, генератор импульсов с корректирующим блоком и распределитель импульсов. В корпусе силового цилиндра выполнены расположенные с уменьшающимся по высоте цилиндра шагом отверстия, которые гидравлически соединены с электромагнитными клапанами, связаннь1ми электрически через распределитель и .пульсов с генератором импульсов и с контактным датчиком положения поршня силового цилиндра, взаимодействукмцим с контактами на штоке поршня силового цилиндра, рас положенными с увеличивающимсяпо вы соте штока шагом, причем расстояния между контактами на штоке равны соответствующим расстояниям между отверстиями на силовом цилиндре . Это устройство автоматическое регулирование глубины отвала по заданной программе осуществляет тольк на этапе выглубления. В результате реализации этой программы отрабатывается оптимальный закон выглубле ния отвала вида е для бульдозера ДЭТ-250 и грунтов пе вой категории, имеющий вид -o,n-fce в 0,335 е где he глубина копания, MJ tg 12-t5, оптимальное время выглубления для данного типа грунтов, с, АВ 0,335, Ugt 0,07 - постоянные коэффициенты, учитывающие категорию грунта и тип машины; в дискретном варианте, реализуемом известным устройством, имеющий вид -L-fnAt. , где йЬ -о переменный шаг между отверстиями на силовом цилиндре, м, п 1,2,... k - порядковый номер отверстия, начиная снизу силового цилиндра, постоянный промежуток времени, через который осуществляется управление выглублением отвала, равный, например, 2 с (т.е. промежуток срабатывания электроклапанов устройства). 0,045, Lg 0,07 - постоянные коэффициенты, учитывающие категорию грунта и тип машины. Недостатком устройства является то, что оно не позволяет обеспечить максимальную производительность бульдозера на всем цикле копания, состоящем из участков заглубления и выглубления потому, что заглубление отвала осуществляется оператором вручную, приблизительно по произвольному закону во времени и не операцией выглубления, осуществляемой по оптимальной программе, Целью изобретения является повышение производительности бульдозера на всем цикле копания за счет обеспечения оптимальной формы траектории заглубления. Поставленная цель достигается тем, что устройство для программного регулирования глубины копания бульдозера снабжено дополнительным распределителем импульсов, генератором импульсов и двумя электроклапанами, один из которых посредством трубопровода подключен к полости подъема силового цилиндра и к подводящему трубоп1$оводу, к которому подключен второй дополнительный электроклапан, соединенный с полостью опускания силового цилиндра и электрически связанный со входом дополнительного генератора импульсов и через дополнительный распределитель импульсов с выходом дополнительного генерато- о ра импульсов, при этом дополнительный распределитель импульсов соединен с основным генератором импульсов. Таким образом, дополнительные признаки и связи в совокупности с известными реализуют оптимальный закон заглубления в дискретном виде - Для ДЭТ-250 и грунта первой категории, имеющего вид . 4ti3 шаг между отверстиями силового цилиндра при з глублении, м, 1,5 интервал времени переключения электрокла панов при заглублении, порядковый номер отверс начиная снизу силового цилиндра; 0,2, 0,662-лостоянные коэффи циенты, учитывающие сво ства грунта и тип машин Дискретный оптимальный закон за глубления является аналогом непрер ного оптимального закона заглублен . J Jfl . для бульдозера ДЭТ-250 и грунта пе вой категории, имеющего вид , / -0,b62t, -0,b62t, ,3S5(l-e j, величина заглубления, м 0...3 - оптимальное вре заглубления, с-, 0,385 ,662 - эмпирические коэффициенты, учитывающие свойства грунта и тип машины. При реализации закона заглубления используемые электроклапаны пр выглублении отвала задействуются частично (T.e.tij) ) всл ствие большей интенсивности измене йия глубины при заглублении по сра нению с выглублением при оптимальном процессе копания. На фиг.1 схематично изображено ройство, общий ВИД , на фиг.2 - стр турная схема устройства-, на фиг.З график, иллюстрирующий реализацию устройством оптимальных законов за глубления и выглубления в их взаим связи (участок 1-1 заглубление, участок t-11-выглубление). Устройство .содержит соединенные трубопроводами насос 1, гидрораспределитель 2, силовые цилиндры 3 (на чертеже показан один) поршень 4, шток которого соединен с отвалом 5, подводящий 6 и отводящий 7 трубопроводы, соединяющие подпоршневую и надпоршневую полости силового цилиндра с гидрораспределителем 2. Цилиндр 3 снабжен контактным датчиков 8 положения поршня А, состоящим из трубы-штока 9, жестко соединенной со штоком поршня 4 цилиндра 3, внутри которой размещены электроконтакты 10, расположенные по высоте ее с переменным шагом, увеличивающимся к верху трубы, и ролик токосъема 11, жестко соединенный с цилиндром 3. В цилиндре 3 выполнена группа отверстий 12, расположенных с уменьшающимся по высоте цилиндра, начиная снизу, шагом. Расстояния между отверстиями группы на цилиндре 3, например расстояние между первым и вторым отверстиями 12 снизу цилиндра 3, равное «, равно расстоянию между первым и вторым электроконтактами 10 трубы-штока 9 датчика 8 положения поршня 4, внутри которой они выполнены, только отсчет ведется сверху трубы-штока 9 и его расстояние также равно ) , соответственно расстояние Ь между вторьм и третьим отверстиями 12 на цилиндре 3, отсчет ведется снизу цилиндра 3, равно расстоянию (также 1) между вторым и третьим электроконтактами 10 трубы-штока 9, отсчет ведется сверху трубы-штока 9,т.е. очевидно, что расстояние между отверстиями 2 на цилиндре 3, начиная снизу цилиндра 3 и расстояния между электрог контактами 10 на трубе-штоке 9, начиная сверху трубы-штока 9, вьтолнены по одному и тому же закону Ч вИв° Группа отверстий 12 цилиндра 3 соединена группой трубопроводов 13, снаб Генной группой электромагнитных клапанов 14 с общим отводящим трубопроводом 7. Надпоршневая полость цилиндра 3 соединена дополнительным трубопроводом 15, снабженным электромагнитным клапаном 16, с подводящим трубопроводом 6, который также имеет электромагнитный клапан 17, расположенный ниже соединения трубопроводов 6 и 15. Устройство включает также (фиг.2 генератор импульсов 18, распределитель импульсов 19, соединенные между собой, и дополнительные генератор 20 и распределитель импульсов 21, соеди ненные между собой, контакт 22 включения гидрораспределителя и корректирующий блок 23. Выходы распределителей импульсов 19 и 21 соединены с группой клапанов 14. Распределитель импульсов 19 соединен с датчиком 8 положения поршня 4, который соединен с выходом генератора импульсов 20 и электромагнитным клапа ном 16. Последний электрически соединен с выходом распределителя импульсов 21 и электроклапаном 17, а распределитель импульсов 21 соедине также с генератором импульсов 18. Устройство запускается в работу при замыкании контакта 22 рукояткой гидрораспределителя 2 при установке ее в положение Подъем. Устройство работает следующим об разом. Оператор разгоняет бульдозер до о ределенной скорости и переводит ру коятку гидрораспределителя 2 в положение Подъем. При этом замыкается контакт 22, открывается электромагнитный клапан 16 и по трубопроводу 15 в надпоршневую полость цилиндра 3 поступает масло и давит на поршень 4 со штоком. Одновременно запускается генератор импульс рв 20, сигналы с которого поступают на распределитель импульсов 21 и группу электромагнитных клапанов 14, которы срабатывают в последовательности, за даваемой распределителем импульсов 21 через интервал времени (фиг.З). Распределителем импульсов 21 задается такая последовательность открытия клапанов 14, при которой сначала открьгоается, например, четвертый клапан из группы клапанов 14, начиная сверху цилиндра 3, а клапаны /расположенные выше (первый, вто рой, третий),не срабатьшают. Поршень со штоком перемещается вниз и интенсивно заглубляет отвал 5 (участок at , фиг.З) до тех пор, пока не перекроет четвертое, начиная сверху цилиндра 3, отверстие из гру пы отверстий 12. При этом слив масл из надпоошневой полости цилиндра 3 прекращается, поршень 4 со штоком останавливается, а отвал 5 перемещается горизонтально (участок Ьс, фиг.З) до тех пор, пока не истечет время первого импульса управления длительности 4t3(фиг.З) при заглублении, задаваемого генератором 20 и поступающего через распределитель импульсов 21 на четвертый электромагнитный клапан из группы электромагнитных клапанов 14, начиная сверху цилиндра 3. При открытии следующего клапана из группы 14 заглубление отвала 5 происходит аналогично. На фиг.З показан процесс заглубления отвала в два этапа. После четвертого, начиная сверху цилиндра 3, клапана из группы 14, открывается, например, пятый клапан из группы 14, поршень 4. перемещается вниз, заглубляя отвал 5, затем перекрывает пятое, начиная сверху, отверстие из группы отверстий 12 и останавливается. Отвал 5 при этом перемещается горизонтально до окончания второго импульса управления длительности ut (фиг.З) при заглублении, задаваемого генератором импульсов 20 и поступающего через распределитель импульсов 21, например, на пятый сверху цилиндра 3 клапан из группы клапанов 14. В конце процесса заглубления (точка А , фиг.З) кривая заглубления стыкуется с началом кривой выглубления. Одновременно с процессом заглубления отвала 5, заглубляемого перемещением поршня 4 со штоком, перемещается вниз, трубашток 9 контактного датчика 8, жестко связанная со штоком поршня 4 цилиндра 3, электроконтакты 10 которой при этом последовательно замыкаются с неподвижным роликом токосъема 11, передавая информацию о положении поршня 4 в распределитель импульсов 19, в котором формируется программа выглубления, т.е. начало и последовательность отработки группы клапанов 14 при выглублении. npoifecc выглубления отвала 5 начинается тогда, когда истечет время заглубления отвала 5 (Т фиг.З), положение отвала 5 в конце этого времени соответствует началу его выглублеиия. По истечении Т, времени заглубления сигнал с дополнительного распределителя импульсов поступает на электромагнитный клапан 16. КОТООЫЙ- ЗЯКПЫПЯРТГЯ- ПРИ этом одновременно открывается элект ромагнитный клапан 17, соединенный с ним электрически. Масло поступает в подпоршневую полость цилиндра 3 и давит на поршень 4. Кроме того, сигнал с распределителя импул сов 21 поступает на вход генератора импульсов 18, который запускается, вырабатывая управляющие импульсы длительностью, равной времени открытия каждого клапана группы 14 при выглублении ( 4igi фиг.З). Импульсы поступают на распределитель импульсов 19 и с него на клапаны группы 14. Так как на последнем этапе заглубления последнее (нижнее) отверстие 12 перекрыто порш нем 4 и это положение поршня 4 является начальным при выглублении (отвала 5), то первый импульс с рас пределителя импульсов 19 подается н следующий по ходу поршня 4 электрокл пан из группы 14, т.е. второй, начи ная снизу цилиндра 3. Этот электроклапан открывается, поршень 4 перемещается вверх, .выглу ляя отвал 5 по некоторой кривой (участок Аб , фиг.З). При перекрытии поршнем 4 второго, начиная снизу цилиндра, отверстия из группы 1 поршень 4 останавливается, отвал 5 перемещается горизонтально (участок В С , фиг.З) до тех пор, пока не истечет время Д-tg (фиг.З), в течение которого электроклапан из группы 14 второй, начиная снизу силового цилиндра 3, находится в открытом состоянии. По истечении этого времени с распределителя импульсов 19 подается импульс на открытие следующего по ходу поршня 4 клапана. Очередной электромагнитный клапан открывается и выглубление отвала 5 происходит так же,как и при открытии второго, начиная снизу цилиндра 3, клапана из группы 14. Таким образом, процесс выглубления осуществляется на всей длине участка выглубления вплоть до полного выглубления отвала 5, т.е. до отработки всех клапанов 14. Перемещение поршня 5 из одного положения в другое (от одного отверстия группы 12 к другому отверстию группы 12) через расстояние между отверстиями 12, уменьшающимся по определенному закону, близкому к оптимальному (кривая 1) при заглублении и кривая 2 при выглублении (фиг.З) промежуток времени ui, при заглублении и 4io ui. cg X u i, при выглублении, позволяет осуществлять плавно-ступенчатое изменение глубины на участке заглубления (кривая 1J, (фиг.З) и на участке выглубления (кривая 2, фиг.З), взаимосвязано между собой, т.е. на всем участке осуществить изменение глубины, близкое к оптимальному. Устройство позволяет осуществлять заглубление и выглубление осуществляется по плавно-ступенчатой траектории, близкой к оптимальной для данного типа грунта, сократить время набора призмы максимального объема, повысить производительность бульдозера, облегчить в значительной степени труд оператора (его работа выполняется авт томатом, он же осуществляет только контроль за работой устройства), обеспечить полную автоматизацию управления бульдозерами, которые могут использоваться в трудных условиях, где участие оператора либо нежелательно, либо невозможно.
г



УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ КОПАНИЯ БУЛЬДОЗЕРА по авт.св. № 744078, о тличающееся тем, что, с целью повышения производительности бульдозера на всем цикле копания за счет обеспечения оптимальной форюл gfPr : 70ff f,J TPVf;I 5ИБЛИУ1 {Й траектории заглубления, оно снабжено дополнительными распределителем импульсов, генератором импульсов и двумя электроклапанами, один из которых посредством трубопровода подключен к полости подъема силового цилиндра и к подводящему трубопроводу, к которому подключен второй дополнительный электроклапан, соединенный с полостью опускания силового цилиндра и электрически связанный со входом дополнительного генератора импульсов и через дополнительный распределитель цилиндров с выходом дополнительного генератора импульсов, при этом дополнительный распределитель цилиндров соединен с основным ге (П нератором импульсов.
ЧИ
XI
/б
W
.X
.
NOXN
ч ч
/2 /2
W
/
ie
fA
1
1
за
Фиг. 1
I-I
/-Я
(риг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для программного регулирования глубины копания бульдозера | 1977 |
|
SU744078A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
