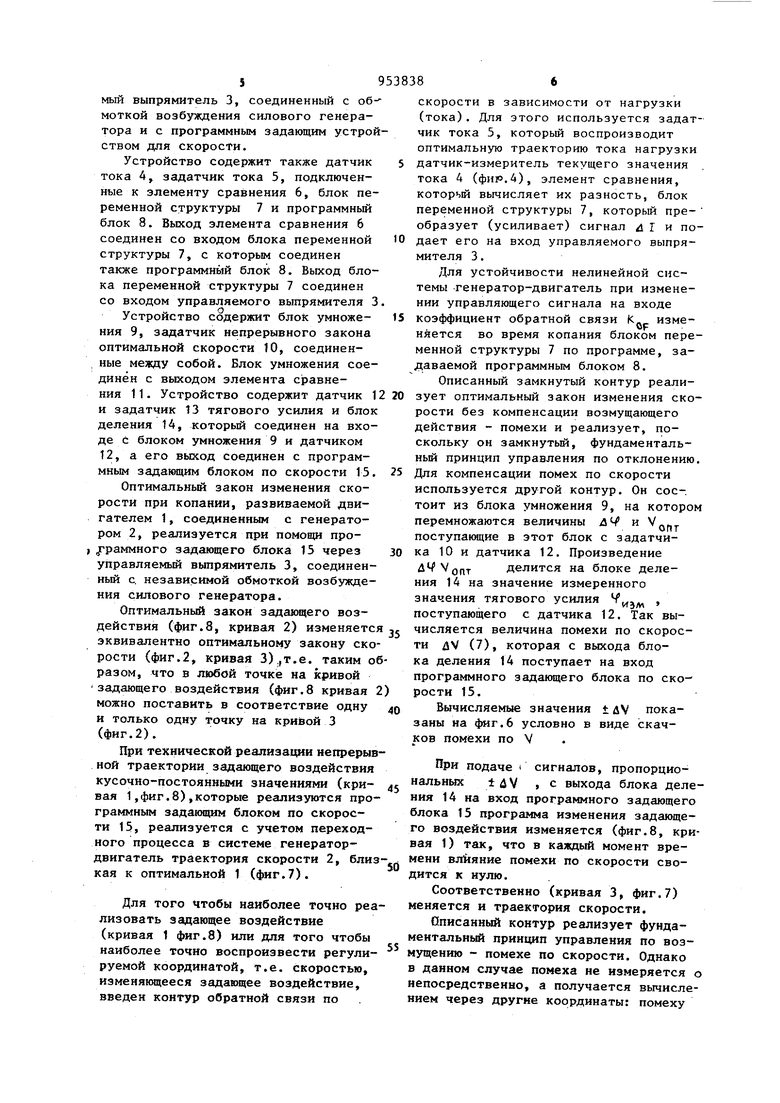
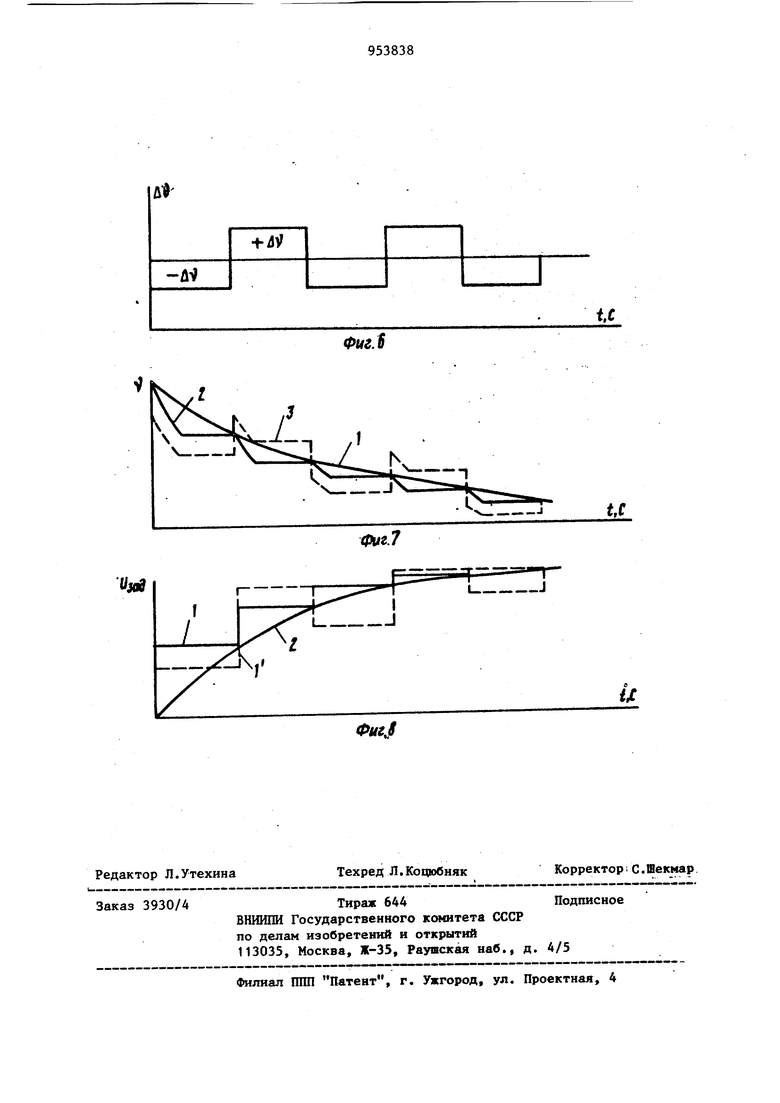
Изобретение относится к устройствам для комбинированного управления землеройно-транспортными машинами. Известно устройство для управления процессом копания бульдозера, на пример, с электромеханической трансмиссией на базе трактора ДЭТ-250С1 J В известном устройстве управлени отвалом осуществляется вручную, а скорость изменяется автоматически в зависимости от нагрузки на рабочем органе благодаря наличию трехобмоточ ного силового генератора в системе генератор-двигатель управления скоростью. Однако такие устройства не компенсируют одновременно помеху по скорости и тяговому усилию. Кроме то го, они не реализуют оптимальных законов по скорости и глубине копаИзвестно также устройствоС2 2 для управления скоростью землеройных тран портных машин с электрическими машинами независимого возбуждения. Однак они также не обеспечивают своевремен ной компенсации помехи по скорости и изменение скорости по оптимальному закону при копании, С помощью таких устройств не удается достичь наивысшей производитель ности землеройных агрегатов. Наиболее близким к изобретению является устройство для управления рабочим органом бульдозера , соде жащее соединенные между собой тяговой двигатель и силовой генератор с независимыми обмотками возбуждения и управляемым выпрямителем, два эле мента сравнения, к одному из которых подключены датчик и задатчик тягового усилия. Устройство содержит также насос, гидрораспределитель, силовой цилиндр для перемещения рабочего органа в ве тикальной плоскости, контактный датчик положения штока силового цилиндра, генератор импульсов с корректирукицим блоком, распределитель импульсов и электромагнитные клапаны. Электромагнитные клапаны связаны элек рически через распределитель импульсов с генератором импульсов и контактным датчиком положения штока сил вого цилиндра, взаимодействующим с контактами на штоке силового, цилиндра. Устройство содержит также дополн тельный силовой цилиндр, шарнирно установленньш между толкающим брусом и отвалом, две пары ялектромагнитных KjfanaHOB - пару для заглубления отвала и пару для его выглубления путем изменения угла резания отвала, тензодатчик, задатчик тягового усилия, логическое устройство с двумя выходами (плюс, минус), соединенное на входе с устройством сравнения, а также инвертор, уставку поворота срабатывания, сравниваклцее устройство, усилитель. Вход инвертора соединен с выходом логического устройства со знаком минус, а выход усилителя - с парой электромагнитных клапанов заглубления отвала. Устройство имеет соединенные между собой уставку порога срабатывания электромагнитньк клапанов, устройство сравнения. Усилитель и устройство сравнения соединены с выходом логического устройства со знаком плюс, а выход усилителя с парой электромагнитных клапанов, Это устройство реализует оптимальный закон изменения глубины копания и осуществляет компенсацию помехи по тяговому усилию с помощью комбинированного управления рабочим органом, но не реализует оптимального закона изменения скорости и не компенсирует помех по скорости одновременно и взаимосвязанно с компенсацией помехи по тяговому усилию, В результате процесс копания затягивается и не достигается наибольшая производительность агрегата при копании. Целью изобретения является повьш1еиие точности управления за счет компенсации помехи по скорости. Поставленная цель достигается тем, что предложенное устройство снабжено задатчиком оптимальной скорости, блоком умножения, блоком деления, программным задающим блоком оптимальной скорости, программным блоком, блоком переменной структуры и датчиком и задатчиком тока, выходы которых подключены ко второму элементу сравнения, выход которого и выход программного блока подключены ко входам блока переменной структуры, выход последнего и выход программного задакицего блока подключены к управляемому выпрямителю. Выходы задатчика оптимальной скорости и первого элемента сравнения через блок умножения, а выход датчика тягового усилия непосредственно подключены ко входам блока ления, вьгход которого подключен ко входу программного задающего блока скорости. Сущность изобретения поясняется следующим. Для тягового КПД оптимальное тяговое усилие при отсутствии помехи оптимальная скорость при отсутствии помехи в идеал ном случае. При наличии помехи по тяговому усилию Л / и скорости 4V для достижения наибольшей производитель ности процесса копания необходимо, чтобы правая часть уравнения (1) пр отсутствии помех равнялась правой части этого же уравнения при наличии помех. Если имеется помеха по тяговому усилию 4/ , то запишем Помеха по тяговому усилию вызыва ет помеху по скорости со знаком (-d и наоборот V nrЗапишем. (1 У «V Оптопг Из уравнения (4) получим выраже ние для определения помехи .V. г- :. ,„ опт . - текущее значение тягово усилия, измеренное с по мощью тензодатчика. Формулу (5) можно записать в вид .У . (Л Согласно выражению (7) для вычис )1ения величины помехи по скорости, помехи, которую нужно компенсироват чтобы процесс был более производительным, необходимо перемножить величины 44 иУ..„-..и это произведение разделить на зм Причем, необходимо отметить, что величина 4 Ч и величина ,j могут быть вьзделены с помощью элементов и вестного устройства для комбинированного управления рабочим органом, но при отсутствии устройства для комбинированного управления отвалом величина лУ вычислена быть не может, т.е. величина помехи ЛV H4Y тесно связаны между собой. Если помеха имеет знак минус, а помеха uV - знак плюс, то для вычисления ЛУ используем также формулу (7). В этом случае/и.(, изм опт/ Таким образом, для компенсации помехи по скорости необходимо прежде вычислить ее величину. Кроме того, необходимо реализовать оптимальную траекторию скорости и показать как нужно ее менять с целью компенсации помехи. . На фиг.1 изображена структурная схема устройства для управленияj на фиг.2 - графики, показывающие реализацию оптимальных законов изменения скорости и глубины при идеальном грунте-, на фиг.З - график, условно показывающий отклонения ±4V тягового усилия от задаваемого из-за неоднородности грунта; на фиг.4 - график, условно показывающий изменения глубины копания (отклонения ft от текущего значения Ь ) путем автоматического изменения угла резания отвала для компенсации отклонения тягового усилия от задаваемого, на фиг.З - график, показывакяций реализацию оптимального закона углубления при неоднородном грунте с учетом отклонения глубины копания в пределах ± Л 1i на фиг. 6 - график, условно показывающий изменения скорости ± 4V агрегата при копании, возникающие за счет неоднородности грунта; на фиг.7 - график, показывающий реализацию оптимального закона изменения скорости с отклонениями за ; счет компенсации помехи в пределах ± Л V ; на фиг.8 - графики, показывающие оптимальные законы изменения задающего воздействия, позволяющего реализовать оптимальные законы скорости при отсутствии (1) и наличии помехи (). Устройство содержит тяговый двигатель 1 с независимой обмоткой возбуждения и силовой генератор 2 с независимой обмоткой возбуждения, соединенные между собой, управляе5мый выпрямитель 3, соединенный с об моткой возбуждения силового генератора и с программным задающим устрой ством для скорости. Устройство содержит также датчик тока 4, задатчик тока 5, подключенные к элементу сравнения 6, блок переменной структуры 7 и программный блок 8. Выход элемента сравнения 6 соединен со входом блока переменной структуры 7, с которым соединен также программный блок В. Выход блока переменной структуры 7 соединен со входом управляемого выпрямителя 3 Устройство содержит блок умножения 9, задатчик непрерывного закона оптимальной скорости 10, соединенные между собой. Блок умножения соединён с выходом элемента сравнения 11. Устройство содержит датчик 12 20 и задатчик 13 тягового усилия и блок деления 14, который соединен на входе с блоком умножения 9 и датчиком 12, а его выход соединен с программным задающим блоком по скорости 15. Оптимальный закон изменения скорости при копании, развиваемой двигателем 1, соединенным с генератором 2, реализуется при помощи про, jpaMMHoro задающего блока 15 через управляемый выпрямитель 3, соединенный с, независимой обмоткой возбуждения силового генератора. Оптимальный закон задающего воздействия (фиг.8, кривая 2) изменяетс эквивалентно оптимальному закону ско рости (фиг.2, кривая 3).,т.е. таким о разом, что в любой точке на кривой задающего воздействия (фиг.8 кривая можно поставить в соответствие одну к только одну точку на кривой 3 (фиг.2). При технической реализации непрерыв ной траектории задающего воздействия кусочно-постоянными значениями (кривая 1,фиг.В),которые реализуются про граммным задающим блоком по скорости 15, реализуется с учетом переходного процесса в системе генератордвигатель траектория скорости 2, бли кая к оптимальной 1 (фиг.7). Для того чтобы наиболее точно реа лизовать задающее воздействие (кривая 1 фиг.8) или для того чтобы наиболее точно воспроизвести регулируемой координатой, т.е. скоростью, изменяющееся задающее воздействие, введен контур обратной связи по 8 скорости в зависимости от нагрузки (тока). Для этого используется задатчик тока 5, который воспроизводит оптимальную траекторию тока нагрузки датчик-измеритель текущего значения тока 4 (фи10.4), элемент сравнения, которьй вычисляет их разность, блок переменной структуры 7, который преобразует (усиливает) сигнал л Г и подает его на вход управляемого выпрямителя 3. Для устойчивости нелинейной системы -генератор-двигатель при изменении управляющего сигнала на входе коэффициент обратной связи К- изменяется во время копания блоком переменной структуры 7 по программе, задаваемой программным блоком В. Описанный замкнутый контур реализует оптимальный закон изменения скорости без компенсации возмущающего действия - помехи и реализует, поскольку он замкнутый, фундаментальный принцип управления по отклонению. Для компенсации помех по скорости используется другой контур. Он сое-, тоит из блока умножения 9, на котором перемножаются величины 4 и V поступакмцие в этот блок с задатчика 10 и датчика 12. Произведение ДЧУОПТ делится на блоке деления 14 на значение измеренного значения тягового усилия j, , с датчика 12. Так выпоступающегочисляется величина помехи по скорости V (7), которая с выхода блока деления 14 поступает на вход программного задающего блока по ско рости 15. Вычисляемые значения t uV показаны на фиг.6 условно в виде скачков помехи по V подаче сигналов, пропорцио t Л V , с выхода блока деления 14 на вход программного задающего блока 15 программа изменения задающего воздействия изменяется (фиг.В, кривая 1) так, что в каждый момент времени влияние помехи по скорости сводится к нулю. Соответственно (кривая 3, фиг.7) меняется и траектория скорости. Описанный контур реализует фундаментальный принцип управления по возмущению - помехе по скорости. Однако в данном случае помеха не измеряется о непосредственно, а получается вычислением через другие координаты: помеху по тяговому усилию оптимальное заданное значение скорости V. и из меренное значение тягового усилия В этом устройстве реализуются в комбинации(каждый своим контуром)два фундаментальных принципа управления принцип управления по отклонению реа лизуется программной системой управления скоростью, замкнутой для устойчивости (эту систему определяют часто как.комбинированную следящую систему), принцип управления по возмущению реализуется контуром для ком пенсации помехи, который включает (измеритель) вычислитель помехи или возмущения (блок деления), сигнал с которого изменяет программу задания по скорости и реализует принцип управления по возмущению. Кроме того, комбинированное управление по скорости не может осуществляться без комбинированного управления по тяговому усилию ибо вели чина помехи по скорости вычисляется через параметры помехи по тяговому усилию д 1/ и измеренное тяговое усил При комбинированном управлении скоростью агрегата помеха по скорости не проходит в силовую установку трактора, а своевременно компенсируется, что не вызывает колебаний мощности силовой установки и не снижает производительность агрегата. Вследствие одновременной и взаимосвязанной компенсации помех по тяговому усилию скорости снижаются колебания скорости агрегата, что также ведет к повышению производительности агрегата. На фиг.3,6,7 показано условно,что помехи по Ч и V , а также изменение скорости при компенсации осуществляются скачком. На самом деле эти изменения проводят более плавно во времени. Предложенное устройство позволяет снизить колебания по скорости и мощности силовой установки, что повьппает производительность агрегата. Экономический эффект от использования изобретения при повышении производительности на 5-8% бульдозера на базе ДЭТ-250 может составить за пять лет эксплуатации 8-12 тыс. руб. на одну машину.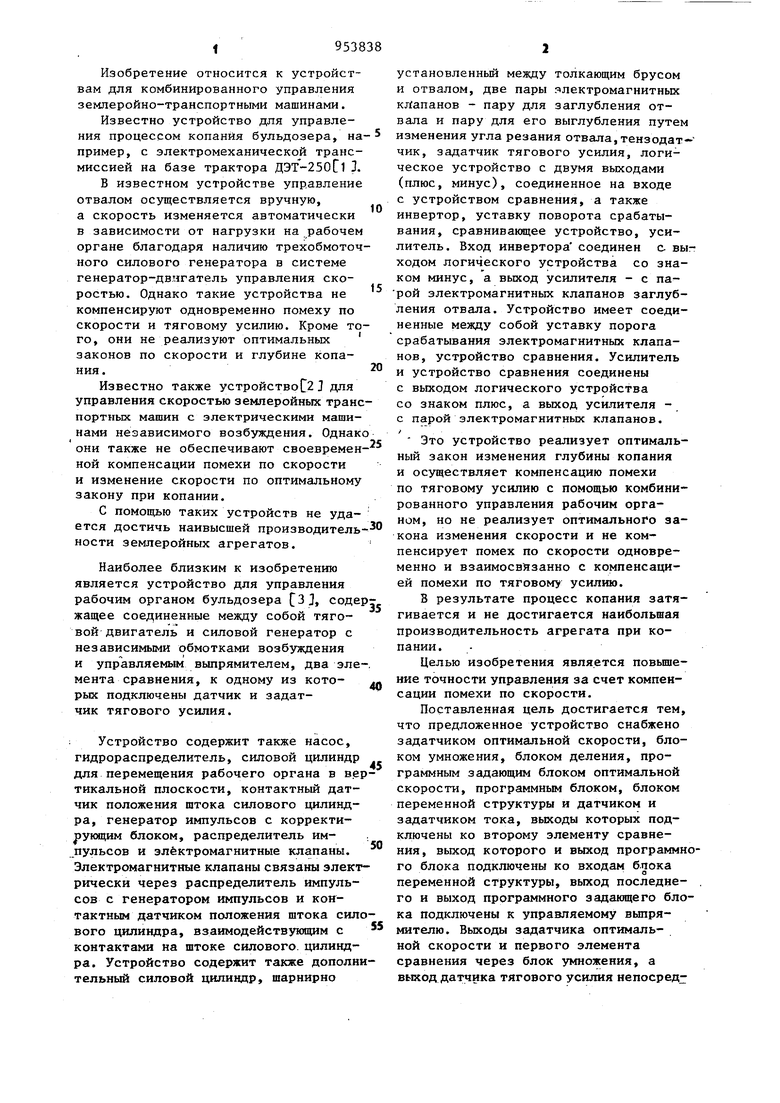

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ БУЛЬДОЗЕРА, содержащее соединенные между собой тяговый двигатель и силовой генератор с независимыми обмотками возбуждения и управляемым выпрямителем и два элемента сравнения, к одному из которых подключены датчик и задатчик тягового усилителя, отличающееся тем, что, с целью повьшения KPrflte3«At 19 .MTflffH 3j UffiJUfeiUH точности управления за счет компенсации помехи по скорости, оно снабжено задатчиком оптимальной скорости, блоком умножения, блоком деления, программным задающим блоком оптимальной скорости, программным блоком, блоком переменной структуры и датчиком и задатчиком тока, выходы которых подключены ко второму элементу сравнения, выход которого и выход программного блока подключены ко входам блока переменной структуры, выход последнего и выход программного задающего блока подключены к управляемому вьтрямителю, причем выходы задатчика оптимальной ско9 рости и первого элемента сравнения через блок умножения, а выход датчика тягового усилия непосредственно подключены ко входам блока деления, выход которого подключен ко входу программного задающего блока скорости. 0 ел со 00 СА 00
All Q
ЬЛЛ
-ЛЛ
-ЛЛ
/L
Фиг.5
Фиг.б
t.C
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исаков П.П | |||
| и др | |||
| Катодное реле | 1921 |
|
SU250A1 |
| М., Машиностроение, 1975 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
