(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ
БУЛБДОЗЕРА


1
Изобретение относится к устройствам для управления рабочими органами землеройных транспортных машин, например бульдозеров с электротран миссией, при копании.
Известны системы экстремального регулирования рабочими процессами землеройно-транспортных машин, содержаш,ие измеритель тяговой мош,ности, запоминаюш,ие и логические элементы, исполнительный гидроцилиндр 1.
Однако при поиске экстремума тяговой мощности машины рабочий орган совершает вертикальные перемец,ения, это сопровождается появлением значительных сил инерции и увеличением мош,ности на управление рабочим органом. Кроме того, данное устройство не реализует оптимальных законов по тяге и глубине копания, поэтому не реализует и экстремали по тяговой мощности, являясь к тому же одноконтурной системой, на которой невозможно компенсировать помеху и реализовать экстремум по тяговой мощности и добиться максимальной производительности.
Известно также устройство для управления рабочим органом бульдозера, включающее электромеханическую трансмиссию типа «генератор-двигатель датчик и задатчик тягового усилия, три элемента сравнения, логический блок, инвертор, две уставки срабатывания, дга усилителя и две пары электромагнитных клапанов заглубления
5 и выглубления отвала. В известном устройстве осуществляется компенсация помехи изменением угла резания за счет поворота отвала относительно конца толкающего бруса, что менее энергоемко, чем перемещение отвала в вертикальной плоскости для
10 поиска экстремали по тяговой мощности 2. Однако это устройство реализует оптимальный расчетный закон глубины копания, полученный только для данного типа грунта с сильно усредненными характеристиками
15 и конкретного агрегата при полном использовании мощности его силовой установки для этих средних характеристик грунта. В случае разработки более слабых грунтов, чем средние, мощность агрегата недоиспользуется, а при разработке более плотных грунтов расчетная оптимальная глубина копания, полученная для средних грунтов, будет завышенной величиной, это приводит к буксованию агрегата и задержке процесса копания, росту момента, снижению мощности
.,и .л(1.ои установки и производгПе.чыюсти аг|)||-ита. Поскольку такие rpyirn.i встречаются даже на одном участке копания, так как 1рунт1)| отличаются сильной неоднородноcTijK), то необходимо иметь устройст ю, нозв(хтикицее полностью использовать MOHIность силовой установки на всех тииах грунтон, ибо только в этом с.тучае нолно используются технические и):)можности агрегата, достигается наивысн1ая производительность.
1ел изобретения повьппение точп(;стп и надежности управления за счет компенсации мощности cил()tioй установки arpcMaia.
11(Хтан;1ен1(ая цель доетигается тем, что устройство снабжено двумя допо,чиите,п иыми задатчиками тигового усилия, втор1 гм логическим блоком, б;юком уми(), четвертым и пятььм элемептами сравпеппя, двумя ре.те. датчиками тока п напряжения, задатчиком мощцоети силового агрегата и б.током отк.лонения мощности, н)ичем датчики тока и напряжения подключены к входам блока умножения, Bbix(XT котоpoio и В151ХОД задатчика мсицпости иодк.тючецы к входам четвертого элемента сравнения, выход последнего подключен к входу второго .тогического блока, один выход которого подключен к одному из реле, а второй вьгход и выход блока уставки отк;1опения мощности подключены к входам ятого элемеьгга сравнения, выход которого подключея к Bxo;iy вто)ог-о реле, при этом доно/шительные задатчики тягового усилия подключены к входу первого элемента сравнения через замыкаюнще контакты еоответствукицих реле, а оеновной задатчик тягового усилии нодк,:|1очен к иервому элементу сравнения через ,тедовате;1ьно соединенные |)азмыкаюп1ие контакт) реле.
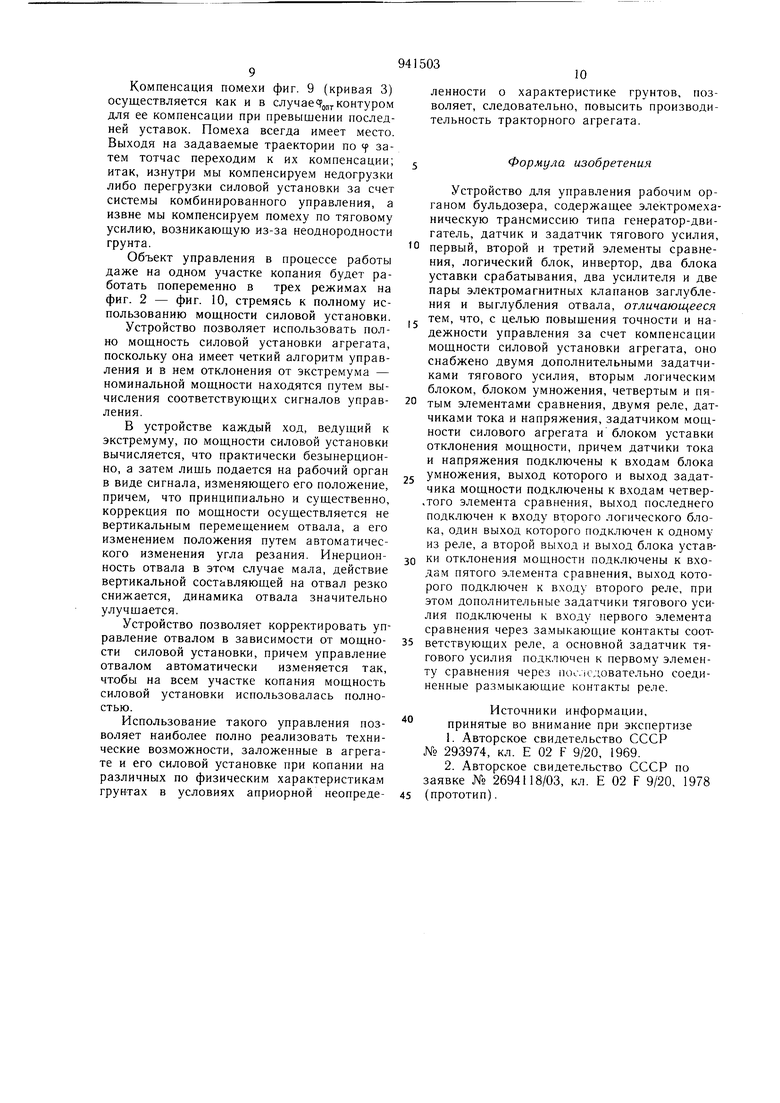
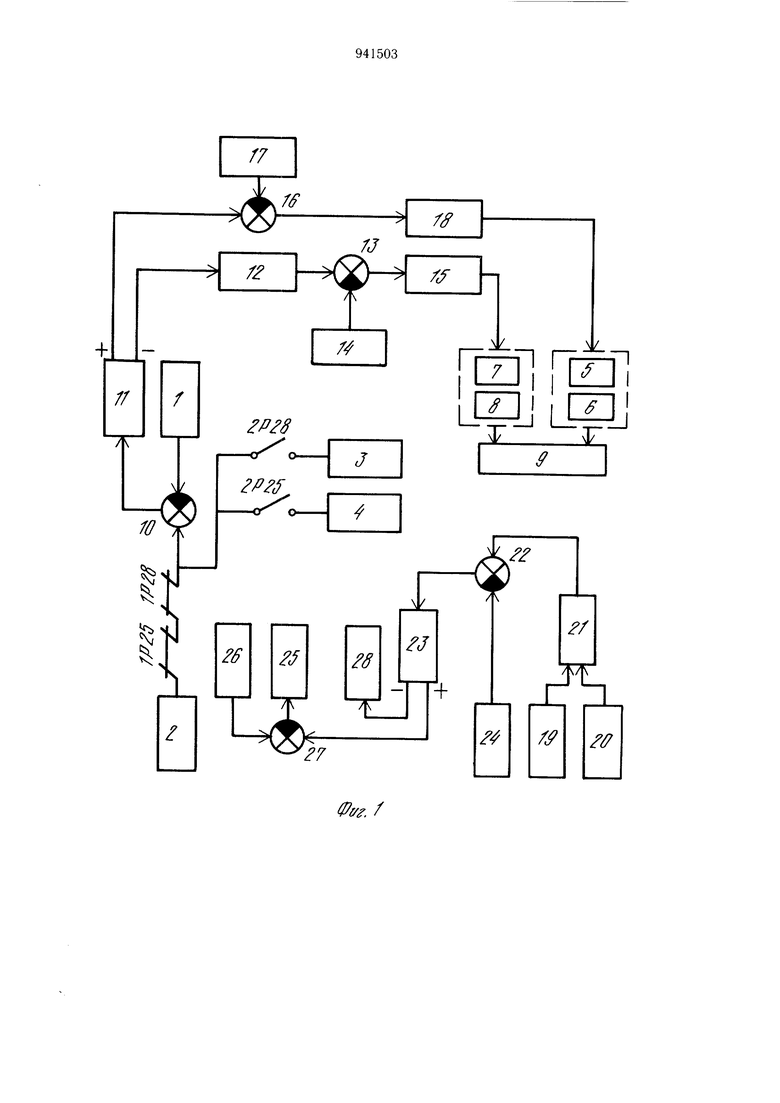
Па . 1 изображена блок-схема уст){)йства; на фиг. 2 --- О 1тимальиое тяговое
уСП,1Ие при (ОЛНОМ ИС 1ОЛЬЗОВаНИИ МО1 и1ОСТИ
си.товой уста1 овки; на фиг. 3 - -рафик, поКаЗЬП}аЮ ЦИЙ условно ОТК„ТОЦ( ОМеХИ
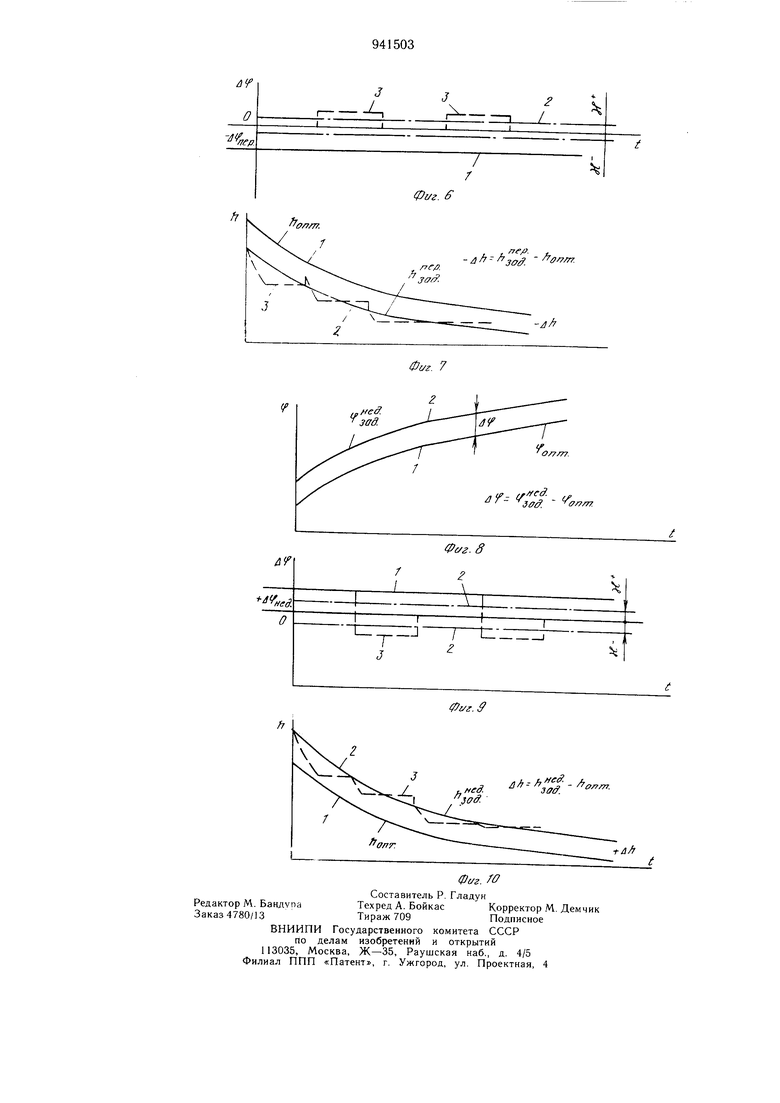
± Лч и глубины (кривая 3 ± Ah ) от )К)Г( значения Ч опт. (кривая 1), уставки ерабат1 вация (к)ивая 2); ;:; (})иг. 4 - -рафики, показы аю цие (крипая 1) .ма. и 1г; ублеция 1 и 6. к СИТИма. траектории ipn 1)0 рамм 1ой ее реализа 1ии ( 2) с учеioM ком 1енса 1ии помехи (кривая 3): иа . 5 -)афики, показ ва1О цие (к) 1) ()пт11мал,цое тяговое усилие 1ри ио.лпой загрузке силовой и 1ребуемое зада.чиг (кривая 2) )Ч) в с, i e ierpv3K i )Й уста1 0 и и; ia ( {) гра()ики, цоказ ва они)е (кривая 1) ве.тиЧИПу 1О ) ( -ДЯлер ), НУ
которую пеобходимо снизит з.ада1О1 1ее тя1оиое для енижеция е)е рузк1- сило и)й усга1- овки, уставки срабат, (крив,1е 2), величины Д ,n|)i- ком 1енсации помехи в случае 1 еоднородпого рунIa; ia фт. 7 - графики, Г1оказываю цие
(кривая 1) оггги.мальнук) траекторию выг.тубления при полной загрузке силовс й установки трактора и требуемое задание траектории (кривая 2) выглубления для ликвидации перегрузки силовой установки, а также (кривая 3) траектория выглубления, близкая к опти.мальной, получаемая с 10.илиью систе.мы комбинированного управления отвалом; на фиг. 8 - графики, г оказываю лие (кривая 1) оптимальное тяговое усилие при г олной загрузке силовой установки и требуемое задание (кривая 2) тягового усилия в случае недогрузки силовой установки трактора (слабый грунт); на фиг. 9 -- графики, 1оказываю1цие (кривая 1) величину по тяговому усилию () 3 которую необходимо увеличить задающее тяговое усилие для увеличения до но.минальной загрузки силовой уста 1овки, уставки порога срабать |вания (±Н) величины А при компенсации помехи в случае неоднородного груита; на фиг. 10 - графики, показывающие (кривая 1) оптимальную траекторию вь глубления при полной загрузке еиловой установки, требуемое задание траектории выглубления (кривая 2) в случае ее недогрузки, а также (кривая 3) траектория вь глубления, близкая к оптимальной, полученная с помо 1, систе.мы комбинированного отвала.
В устройство входит электротрансмиссия, состоящая из тягового двигателя и силового ге гератора, соединенных между собой, датчик 1 и задатчик 2 тягового усилия, дополнительные задатчики тягового уси.аия 3 и 4, две пары электро.ма нитных клапапо ; 5 и б для вь глубления и 7 и 8 заглубления отвала 9.
Устройство включает несколько элементов для компенсации помехи по тяговому усилию (фиг. 1). Первая элементов состоит из соединенных между еобой тензодатчика 1, установленного на толкаюН1ем бруее, основного задатчика тягового усилия 2, перво -о элемента сравне 1ия 10, .логического блока 11 с двумя выходами (плюс, .минус).
Вторая элементов состоит из соединенных между собой инвертора 12, второго элемента сравнения 13, блока уставки порога срабат лва ия 14, усилителя 15 и 1ары электромагнитных клапанов 7 и 8 заглубления отвала 9. и 1вертора 12 соединен с выходом со знаком минус .логического блока 11, а усилитель 15 соединен с электромагнитными клапанами 7 и 8.
Третья эле.ментов состоит из соединeн пяx между собой третьего элемента ера 1непия 16, второго б.лока уставки порога срабат)Шапия 17, усилителя 18, пары электромагнитных к.тапанов 5 и 6. Выход со знаком плюс логического блока 11 соедипеп с входом элемента сравнения 16, а уеилителя 18 соедине с электро.магнит(и,1ми клапа ами 5 и 6.
Устройство содержит датчик тока 19 датчик напряжения силового генератора 20, соединенные с блоком умножения 21, элемент сравнения 22 и входной логический блок 23. Выход блока умножения 21 соединен с входом элемента сравнения 22, а выход элемента сравнения 22 соединен с входом логического блока 23, который имеет два выхода со знаком плюс и минус, кроме того, элемент сравнения 22 соединен с задатчиком мощности 24 силовой установки трактора (силового генератора). Устройство также содержит реле 25, блок уставки отклонения мощности 26, элемент сравнения 27, соединенные между собой, а элемент сравнения 27 соединен также с выходом плюс логического блока 23, с выходом которого со знаком минус соединено реле 28. .
Два дополнительные задатчика тягового усилия 3 и 4 соединены через нормальноразомкнутые контакты реле 25 и 28 с элементом сравнения 10. Реле 25 и 28 содержат свои нормально-замкнутые контакты в цепи между основным задатчиком 2 тягового усилия и элементом сравнения 10.
Устройство работает следующим образом.
Задатчик 2 оптимального тягового усилия задает оптимальную величину тягового усилия, определенную расчетно для определенного типа грунта и типа машины. Датчик 1 измеряет его фактическую величину при копании. Реальное измеренное тяговое усилие отличается от оптимального расчетного из-за резкой неоднородности грунта на определенную величину Дер. В этом случае на выходе элемента сравнения 10 появляется сигнал со знаком плюс, который поступает на выход логического блока 11 с двумя выходами (плюс, минус) и затем появляется на его выходе со знаком плюс, поступает на вход элемента сравнения 16, сравнивается с уставкой блока 17 ( + Н) и в случае ее превыщения поступает на усилитель 18 и группу электроклапанов 5 и 6 выглубления отвала. Отвал поворачивается, угол резания уменьшается, отвал выглубляется (-Ah), происходит компенсация помехи со знаком плюс (фиг. 4, кривая 3).
После компенсации помехи + ЛЧ копание происходит с уменьшенной (на -ДЬ) глубиной. При помехе со знаком минус работают элемент 2, 1, 12, 13, 14, 15, 7, 8 и 9, что имеет место при слабом грунте, при снижении тягового усилия ниже заданного оптимального .,когда9ил,.0- Тогда на выходе устройства сравнения 10 появляется сигнал со знаком минус (- Дер ), он поступает на вход логического блока 11, затем появляется на выходе его со знаком минус, через инвертор 12 поступает на вход элемента сравнения 13, сравнивается на нем с уставкой 14 и при ее превышении поступает на усилитель 15 и группу электромагнитных клапанов 7 и 8, заглубления отвала путем изменения угла резания. Если (условно мгновенно) помеха изменяется на - Acf , то ее ко.мпенсация осуществляется изменением глубины на +ДЬ (так же условно мгновенно), т. е. заглублением. После компенсации помехи (- At) копание проис.ходит с увели5 ченной глубиной +ДН. В обоих случаях компенсация помехи прекращается, если значения ± Дф становятся меньше соответствующих уставок 14 и 17. Так осунхествляется управление отвалом - реализация опти.мального тягового усилия (фиг. 2) за счет выг° лубления, по кривой 2 (фиг. 4) с одновременной компенсацией помехи (кривая 3, фиг. 4).
Комбинированное управление реализует оптимальную кривую тягового усилия «Уопт.
5 (фиг. 2), полученную расчетно для номинальной мощности силового генератора, что необходимо подчеркнуть, и для сильно усредненных характеристик грунта. При копании могут даже на одном участке копания встретиться отдельные участки грунта, ха0рактеристики которого существенно отличаются от тех характеристик, для которых было получено расчетное оптимальное значение тягового усилия опт. (фиг. 2). При этом возможны следующие случаи: при копании могут встретиться грунты более слабые, чем тот средний, для которого рассчитано Чопт (фиг. 2) и при копании могут встретиться грунты более плотные, чем тот средний, для которого рассчитано Чопт. Рассмотрим последний случай.
0 Итак, агрегат реализует траекториюЧопт. (фиг. 2), которая получена расчетно для сильно усредненных характеристик грунтов и для номинального значения мощности силового генератора (силовой установки трактора) РН const и реализуются эти траек тории путем изменения глубины по оптимальному закону ( кривая 1, фиг. 4), а на практике по кривой 2 (фиг. 4) близкой к оптимальной расчетной. Причем между кривыми Топт. (фиг. 2) и hon.i..(кривая 1, фиг. 3),
0 полученными расчетно, существует строгое взаимнооднозначное соответствие, т. е. каждой точке на кривойсрд„.р (фиг. 2) соответствует одна и только одна точка на кривой Ьоп.(кривая 1, фиг. 4). Если изменяется грунт, становится, .например, более плотным, то
5 это соответствие нарушается. Тогда, если копание осуществляется по прежнему закону ЬОРТ, криваясроп должна протекать выше кривой на фиг. 2, но эта кривая 1 получена для номинальной мощности силовой устаQ новки, следовательно для реализации кривой 1 (фиг. 2) требуется большая мощность силовой установки. Это условие выполнить невозможно.
Другой путь заключается в следующем. Необходимо изменить закон выглубления
5 отвала на участке более плотного грунта, уменьшить глубину копания на этом участке, причем необходимо это сделать автоматически, не изменяя ничего в конструкции основного силового гидроцилнндра, реализующего законЧопт (hgrir)- Этот закон можно изменить за счет возможности автоматического выглубления путем изменения yr:ia резания. Поскольку ожидается перегрузка силовой установки при встрече с более плотными грунтами, чем расчетные и реализация расчетного законаЬ(щ,.на вход элемента сравнения И), необходимо подавать в случае перегрузки значение f не с основного задатчика тягового усилия 2, а с дополнительного задатчика 3 тягового усилия, которое (фиг. 5, кривая 2) будет меньше рассчетного па величину - ДЧпе-р.. 6,). Тогда н, в|)1ходе элемента сравнения 10 будет больп ий сигнал Дч , чем был бы он при от- , так как Дч па выходе элемента сравнения 10 равен Д Чизм-Т и чем меныпе заданное значениеср ддем больше в тот же мо.мент времени величина Af , а следовате.льпо, на большую глубину путем измепепия угла резания нужно выглублять отвал. Тут устройство для ко.мпенсапии выступает в другом очепь важном для практики качестве, опо компенеирует как бы искусственно созданную помеху, «помеху, полученную при отклонении мощности от но.минальной. Значение тока и нанряжения силового генератора измеряются эле.мента.ми 19 и 20, поступают па блок умножения 21, произведение этих величин представляет собой текущую мощность силового генератора. Значение этой мощности поступает на элемент сравнения 22, на котором она сравнивается с уставкой мощности 24 - номинальны.м значение.м мощности силового генератора, сигнал АР ,( поступает на вход логического блока 23 и, в случае перегрузки силового геператора ,,, на выход логического блока 23 со знаком минус и на вход реле 28. Реле 28 срабатывает, размыкает свой нормально замкнутый контакт IP 28 в цегн между элементом сравнения 10 и основным залатчиком тягового усилия 2, одновременно замыкая свой нормально разомкнутый контакт между входом элемента сравнения 10 и дополнительным задатчиком тягового усилия 3 и присоединяет его к элементу сравнения 10. Как уже было сказано, в случае перегрузки дополнительный задатчик 3 задает тяговое усилиеq fp 1опт. возникает большая величина Д ( Д Т Чизм . пoяBv яeтcя сигнал на выходе логического блока 11 со знаком плюс, затем, на элементе сравнения 16 на электроклапанах 5 и 6 выг.;1убления отвала. Отвал поворачивается па угол д и выглубляется на величину -ДЬ. Так может произойти на любой части участка копания,- в любой момент копания, ноэтому на фиг. 7 кривая выглубления (оптимальпая при перегрузке) условно изображена ниже на -ДЬ на всем участке копания. На самом деле компенсация прекращается, когда мощность становится меньше Ри,,.,, Т. е. когда мощность входит в норму, и тогда условие для компенсации, созданное изнутри путем сравнения номинального и текущего значения мощностей, исчезает, исчезает сигнал на входе реле 28, оно отключается. Размыкается нормально разомкнутый контакт 2Р 28 и отсоединяет дополнительный задатчик тягового усилия 3, замыкается нормально замкнутый контакт IP 28 и присоединяет основной задатчик тягового усилия. Если в грунте встречаются неоднородности, то они компенсируются так же, как указано выше. В итоге при перегрузке опти.мальпая кривая выглубления может иметь вид (кривая 3, фиг. 7) с учето.м помехи (кривая 3, фиг. 6) и перегрузки (-Acf). Когда агрегат недогружен по .мощности ДРн- Рцзм О, то на выходе блока 23 появляется сигнал со знаком плюс, который поступает на вход элемента сравнения 27, где он сравнивается с уставкой отключения зпачепий мощности 26. В том случае, когда значения отклонения .мощности превысят уставку 26, на выходе элемента сравнения 27 появляется сигнал, который поступает па реле 25. Это реле срабатывает и присоединяет нормально разомкнутыми контактами 2Р 25, которые за.мыкаются и присоединяют к элементу сравнения 10 дополнительный задатчик тягового усилия 4, контакты нор.мально замк утые IP 25 размыкаются и отсоединяют основной задатчик 2 тягового усилия от элемента сравнения 10. При недогрузке на вход элемента сравнения подается кривая 2 (фиг. 8) тягового усилия, которая протекает выше кривой 1 - оптимального процесса tfcinT.,T. e. необходимо сделать, чтобы догрузить силовую установку, заглубить отвал на участке слабого грунта на большую глубину. Получается - Д( изм У дпри величине за / Тогтт Работает группа элементов 12, 13, 14, 15, 7 и 8, отвал при этом выглубляется. С точки зрения нахождения расчетных оптимальных тяговых усилий для плотных грунтов они должны быть больше, а при управлении и перегрузке его нужно задавать меньше, а для более слабых грунтов- наоборот. В случае недогрузки имеем для задания фиг. 8 кривую 2, для которой заданное значение ч Vfi foTiT - кривая 1). Согласно фиг. 9 на слабых грунтах необходимо догружать агрегат на Acf по тяге (кривая 1), при этом величина Af и5м Ч превышает значение уставок (-Н) и осуществляется компенсация. На фиг. 10 кривая 2 изменения глубины показывает как должна протекать кривая 1 в случае недогрузки условно в любом месте участка копания. Кривая 3 показывает техническую реализацию кривой выглубления близкую к оптимальной.
Компенсация помехи фиг. 9 (кривая 3) осуществляется как и в случае%,т. онтуром для ее компенсации при превышении последней уставок. Помеха всегда имеет место. Выходя на задаваемые траектории по «f затем тотчас переходим к их компенсации; итак, изнутри мы компенсируем недогрузки либо перегрузки силовой установки за счет системы комбинированного управления, а извне мы компенсируем помеху по тяговому усилию, возникающую из-за неоднородности грунта.
Объект управления в процессе работы даже на одном участке копания будет работать попеременно в трех режимах на фиг. 2 - фиг. 10, стремясь к полному использованию мощности силовой установки.
Устройство позволяет использовать полно мощность силовой установки агрегата, поскольку она имеет четкий алгоритм управления и в нем отклонения от экстремума - номинальной мощности находятся путем вычисления соответствующих сигналов управления.
В устройстве каждый ход, ведущий к экстремуму, по мощности силовой установки вычисляется, что практически безынерционно, а затем лищь подается на рабочий орган в виде сигнала, изменяющего его положение, причем, что принципиально и существенно, коррекция по мощности осуществляется не вертикальным перемещением отвала, а его изменением положения путем автоматического изменения угла резания. Инерционность отвала в этом случае мала, действие вертикальной составляющей на отвал резко снижается, динамика отвала значительно улучшается.
Устройство позволяет корректировать управление отвалом в зависимости от мощности силовой установки, причем управление отвалом автоматически изменяется так, чтобы на всем участке копания мощность силовой установки использовалась полностью.
Использование такого управления позволяет наиболее полно реализовать технические возможности, заложенные в агрегате и его силовой установке при копании на различных по физическим характеристика.м грунтах в условиях априорной неопределенности о характеристике грунтов, позволяет, следовательно, повысить производительность тракторного агрегата.
Формула изобретения
Устройство для управления рабочим органом бульдозера, содержащее электромеханическую трансмиссию типа генератор-двигатель, датчик и задатчик тягового усилия,
первый, второй и третий элементы сравнения, логический блок, инвертор, два блока уставки срабатывания, два усилителя и две пары электромагнитных клапанов заглубления и выглубления отвала, отличающееся тем, что, с целью повышения точности и надежности управления за счет компенсации мощности силовой установки агрегата, оно снабжено двумя дополнительными задатчиками тягового усилия, вторым логическим блоком, блоком умножения, четвертым и пятым элементами сравнения, двумя реле, датчиками тока и напряжения, задатчиком мощности силового агрегата и блоком уставки отклонения мощности, причем датчики тока и напряжения подключены к входам блока
умножения, выход которого и выход задатчика мощности подключены к входам четвер,того элемента сравнения, выход последнего подключен к входу второго логического блока, один выход которого подключен к одному из реле, а второй выход и выход блока уставки отклонения мощности подключены к входам пятого элемента сравнения, выход которого подключен к входу второго реле, при этом дополнительные задатчики тягового усилия подключены к входу первого элемента сравнения через замыкающие контакты соответствующих реле, а основной задатчик тягового усилия подключен к первому элементу сравнения через пос.:|сдовательно соединенные размыкающие контакты реле.
Источники информации, принятые во внимание при экспертизе
(прототип).
.2
fff/7777.
f
Фг/г.5
.
