(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ КОПАНИЯ БУЛЬДОЗЕРА
I
Изобретение относится к устройствам для программного регулирования глубины копания землеройно-транспортных машин, преимущественно бульдозеров.
Известны устройства для изменения глубины копания (выглубления), состоящие из гидронасоса, масляного бака, распределителя, силовых цилиндров. Выглубление осуществляется визуально оператором, установкой распределителя в определенное положение 1.
Ручное выглубление не позволяет достичь максимальной производительности бульдозера из-за интуитивного воздействия оператора на процесс выглубления.
Наиболее близко к предлагаемому устройство для программного регулирования глубины копания бульдозера, содержащее насос, гидрораспределитель и силовой гидроцилиндр с полостями для подъема и опускания рабочего органа, щток которого соединен с отвалом 2.).
В известном устройстве регулирование глубины (выглубления) отвала осуществляется автоматически по мере достижения на отвале предельного тягового сопротивления, но при этом не достигается максимальная производительность из-за колебательного изменения скорости на каждом этапе выглубления (снижение скорости при начале выглубления и увеличение д.6 некоторого значения при выглублении отвала на не5 которук) величину). Величина выглубления для обеспечения максимальной эффективности протекания процесса копания устанавливается изменением регулировки клапана противодавления в зависимости от свойств грунта, типа машины и подбирается экспериментально. Такая система регулирования не работоспособна на грунтах с малым коэффициентом сцепления, когда достижение предельного сопротивления на отвале невозможно, что вызывает необходимость перехода на ручное регулирование выглубления отвала.
Цель изобретения - повышение производительности бульдозера за счет реализации оптимального закона выглубления. Поставленная цель достигается тем, что
20 устройство снабжено контактным датчиком положения щтока силового цилиндра, генератором импульсов с корректирующим блоком, распределителем импульсов и электромагнитными клапанами, на щтоке силового цилиндра выполнены расположенные с увеличивающимся по высоте штока шагом контакты, а в корпусе силового цилиндра выполнены расположенные с уменьшающимся по высоте цилиндра шагом отверстия, которые гидравлически соединены с электромагнитными клапанами, связанными электрически через распределитель импульсов с генератором импульсов и с контактным Датчиком положения штока силового цилиндра, взаимодействующим с контактами на штоке силового цилиндра, причем .расстояния между контактами на штоке равны соответствующим расстояниям между отверстиями на цилиндре.
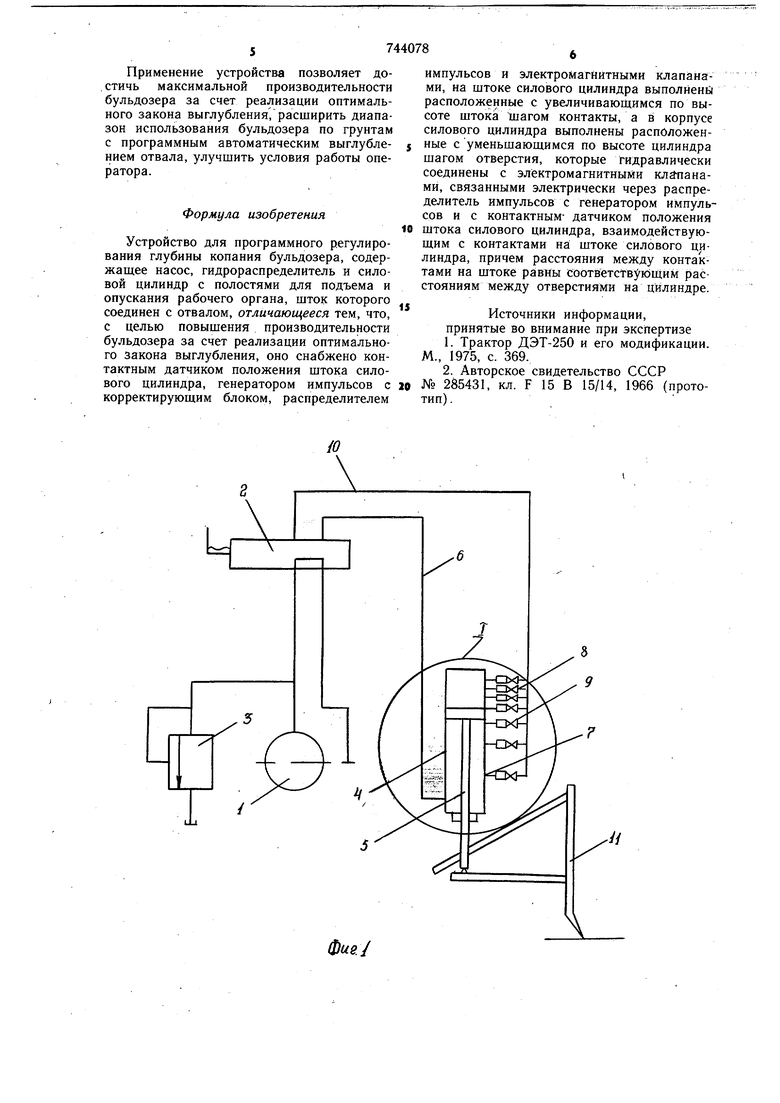
Такое конструктивное решение позволяет осушествлять перемещение щтока цилиндра с кратковременной остановкой по определенной программе, реализующей оптимальный закон выглубления, при любом начальном заглублении отвала, а также позволяет корректировать программу за счет регулирования длины импульсов в зависимости от длины копания и типа грунта. Закон оптимального изменения глубины копания в зависимости от времени копания имеет вид h откуда расстояние между отверстиями на цилиндре уменьшается, а на штоке увеличивается в соответствии с законом h и определяются как разность расстояний между последующим и предыдущим отверстиями,
где п - порядковый номер отверстия на цилиндре, начиная снизу (h 0,l,2, 3...);
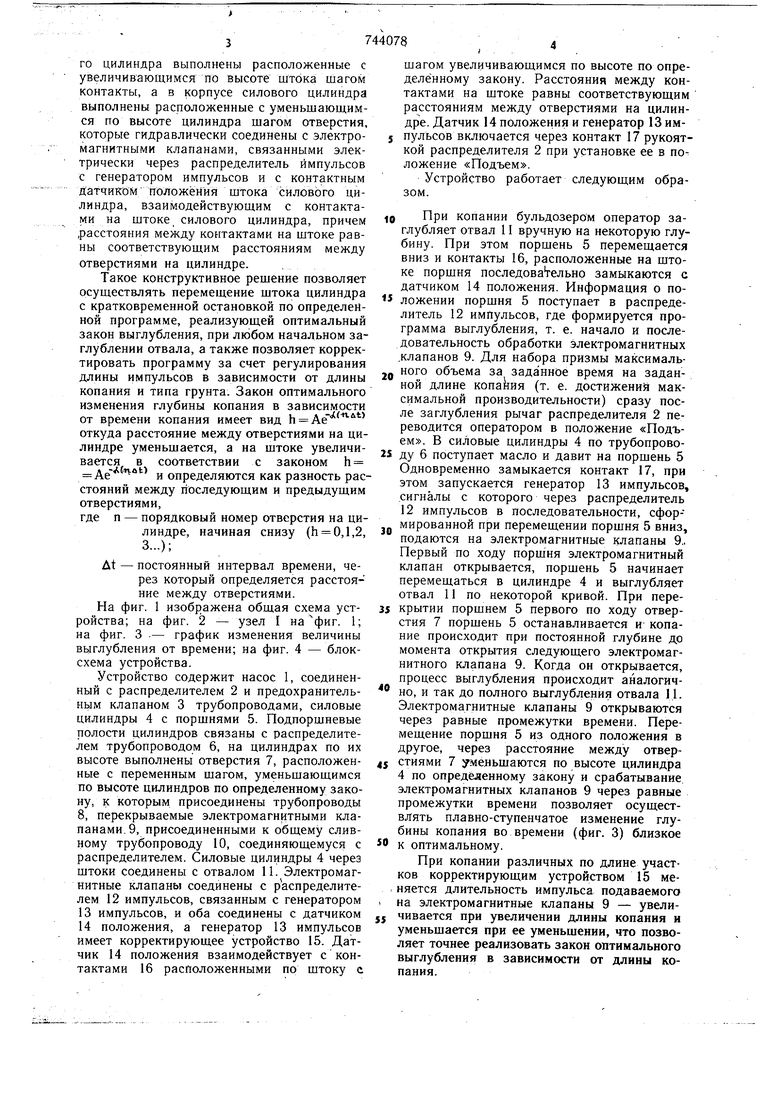
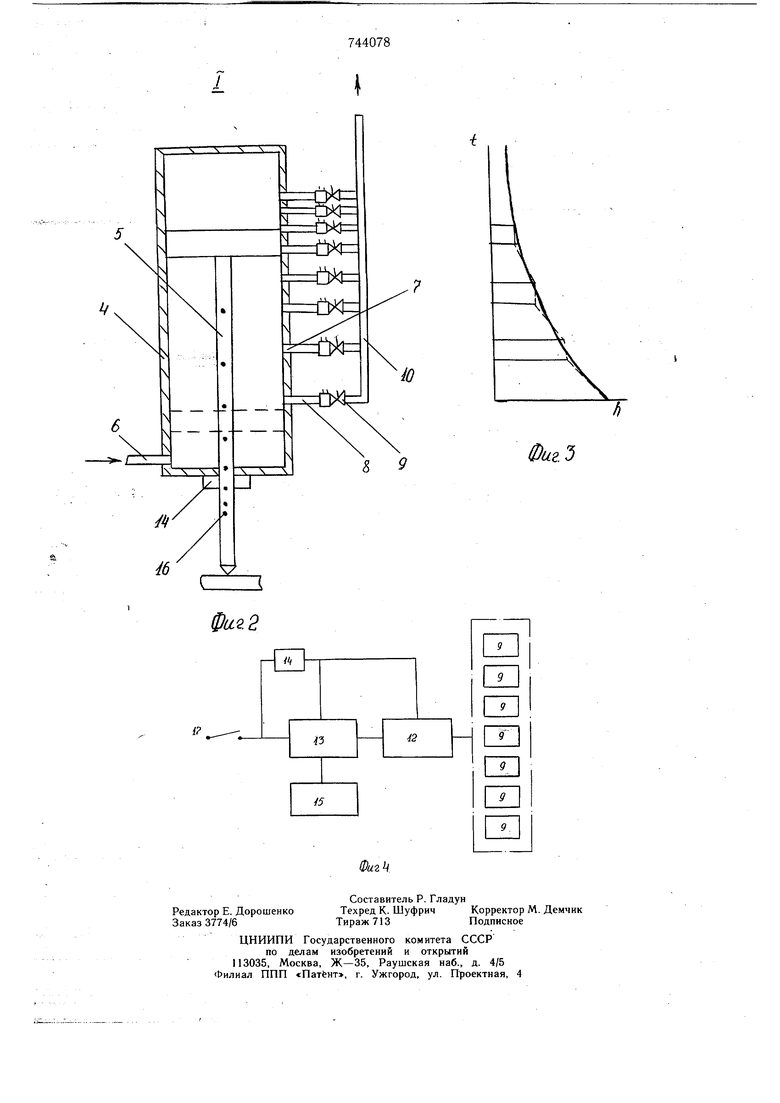
At - постоянный интервал времени, через который определяется расстояние между отверстиями. На фиг. 1 изображена общая схема устройства; на фиг. 2 - узел I на фиг. 1; на фиг. 3 .- график изменения величины выглубления от времени; на фиг. 4 - блоксхема устройства.
Устройство содержит насос 1, соединенный с распределителем 2 и предохранительным клапаном 3 трубопроводами, силовые цилиндры 4 с поршнями 5. Подпоршневые полости цилиндров связаны с распределителем трубопроводом 6, на цилиндрах по их высоте выполнены отверстия 7, расположенные с переменным шагом, уменьшающимся по высоте цилиндров по определенному закону, к которым присоединены трубопроводы 8, перекрываемые электромагнитными клапанами, 9, присоединенными к общему сливному трубопроводу 10, соединяющемуся с распределителем. Силовые цилиндры 4 через щтоки соединены с отвалом 11. Электромагнитные клапаны соединены с распределителем 12 импульсов, связанным с генератором
13импульсов, и оба соединены с датчиком
14положения, а генератор 13 импульсов имеет корректирующее устройство 15. Датчик 14 положения взаимодействует с контактами 16 расположенными по штоку с
шагом увеличивающимся по высоте по определённому закону. Расстояния между контактами на щтоке равны соответствующим расстояниям между отверстиями на цилиндре. Датчик 14 положения и генератор 13 имJ пульсов включается через контакт 17 рукояткой распределителя 2 при установке ее в положение «Подъем.
Устройство работает следующим образом.
O При копании бульдозером оператор заглубляет отвал 11 вручную на некоторую глубину. При этом поршень 5 перемещается вниз и контакты 16, расположенные на штоке поршня последовательно замыкаются е датчиком 14 положения. Информация о положении поршня 5 поступает в распределитель 12 импульсов, где формируется программа выглубления, т. е. начало и последовательность обработки электромагнитных .клапанов 9. Для набора призмы максималь- ного объема за заданное время на заданной длине копания (т. е. достижения максимальной производительности) сразу после заглубления рычаг распределителя 2 переводится оператором в положение «Подъем. В силовые цилиндры 4 по трубопровоS ду 6 поступает масло и давит на поршень 5 Одновременно замыкается контакт 17, при этом запускается генератор 13 импульсов, сигналы с которого через распределитель 12 импульсов в последовательности, сфорJJ мированной при перемещении порщня 5 вниз, подаются на электромагнитные клапаны 9., Первый по ходу поршня электромагнитный клапан открывается, поршень 5 начинает перемещаться в цилиндре 4 и выглубляет отвал 11 по некоторой кривой. При перекрытии поршнем 5 первого по ходу отверстия 7 поршень 5 останавливается и копание происходит при постоянной глубине до момента открытия следующего электромагнитного клапана 9. Когда он открывается, процесс выглубления происходит аналогично, и так до полного выглубления отвала 11. Электромагнитные клапаны 9 открываются через равные промежутки времени. Перемещение порщня 5 из одного положения в другое, через расстояние между отверстиями 7 уменьшаются по высоте цилиндра 4 по определенному закону и срабатывание электромагнитных клапанов 9 через равные промежутки времени позволяет осуществлять плавно-ступенчатое изменение глубины копания во времени (фиг. 3) близкое
к оптимальному.
При копании различных по длине участков корректирующим устройством 15 меняется длительность импульса подаваемого
на электромагнитные клапаны 9 - увеличивается при увеличении длины копания и уменьшается при ее уменьшении, что позволяет точнее реализовать закон оптимального выглубления в зависимости от длины копания. Применение устройства позволяет до.стичь максимальной производительности бульдозера за счет реализации оптимального закона выглубления, расширить диапазон использования бульдозера по грунтам с программным автоматическим выглублением отвала, улучшить условия работы оператора. Формула изобретения Устройство для программного регулирования глубины копания бульдозера, содержашее насос, гидрораспределитель и силовой цилиндр с полостями для подъема и опускания рабочего органа, шток которого соединен с отвалом, отличающееся тем, что, с целью повышения производительности бульдозера за счет реализации оптимального Закона выглубления, оно снабжено контактным датчиком положения штока силового цилиндра, генератором импульсов с корректирующим блоком, распределителем импульсов и электромагнитными клапанами, на штоке силового цилиндра выполнена расположенные с увеличивающимся по высоте штока шагом контакты, а в корпусе силового цилиндра выполнены расположенные с уменьшающимся по высоте цилиндра шагом отверстия, которые гидравлически соединены с электромагнитными кла-панами, связанными электрически через распределитель импульсов с генератором импульсов и с контактным- датчиком положения штока силового цилиндра, взаимодействующим с контактами на штоке силового цилиндра, причем расстояния между контактами на штоке равны соответствующим расстояниям между отверстиями на цилиндре. Источники информации, принятые во внимание при экспертизе 1.Трактор ДЭТ-250 и его модификации. М., 1975, с. 369. 2.Авторское свидетельство СССР № 285431, кл. F 15 В 15/14, 1966 (прототип).