1
Изобретение относится к устройствам железнодорожной автоматики для обеспечения безопасности движения поездов и увеличения пропускной способности железнодорожных линий.
Известно устройство для регулирования движения поездов, содержащее рельсовую цепь, на одном и другом концах которой к рельсам подключены передатчик и приемник частотной и числовой кодовой автоблокировки и автоматической локомотивной сигнализации, датчик проследования поезда, выходы которого подключены к блоку вычисления скорости поезда, выход которого через блок формирования управляющих команд подключен к передатчикам сигналов частотной и числовой кодовой локомотивной сигнализа-. ции и к блоку формирования сигналов автоматического управления тгрмоза,ми, а на локомотиве размещены приемемные катушки, подключенные через приемники частотной и числовой кодоВОЙ автоматической локомотивной сиг нализации к локомотивному светофору и приемнику сигналов автоматического управления тормозами, связанному с блоком коррекции длины измерительного участка, причем к приемнику час тотной автоматической локомативной сигнализации подключен блок выделения амплитудно-модулированного сигнала jflj .
10
Недостатком известного устройства является сложность, обусловленная использованием шлейфа, который затрудняет применение механизмов при выполнении путевых работ.
15
Целью изобретения является упрощение устройства.
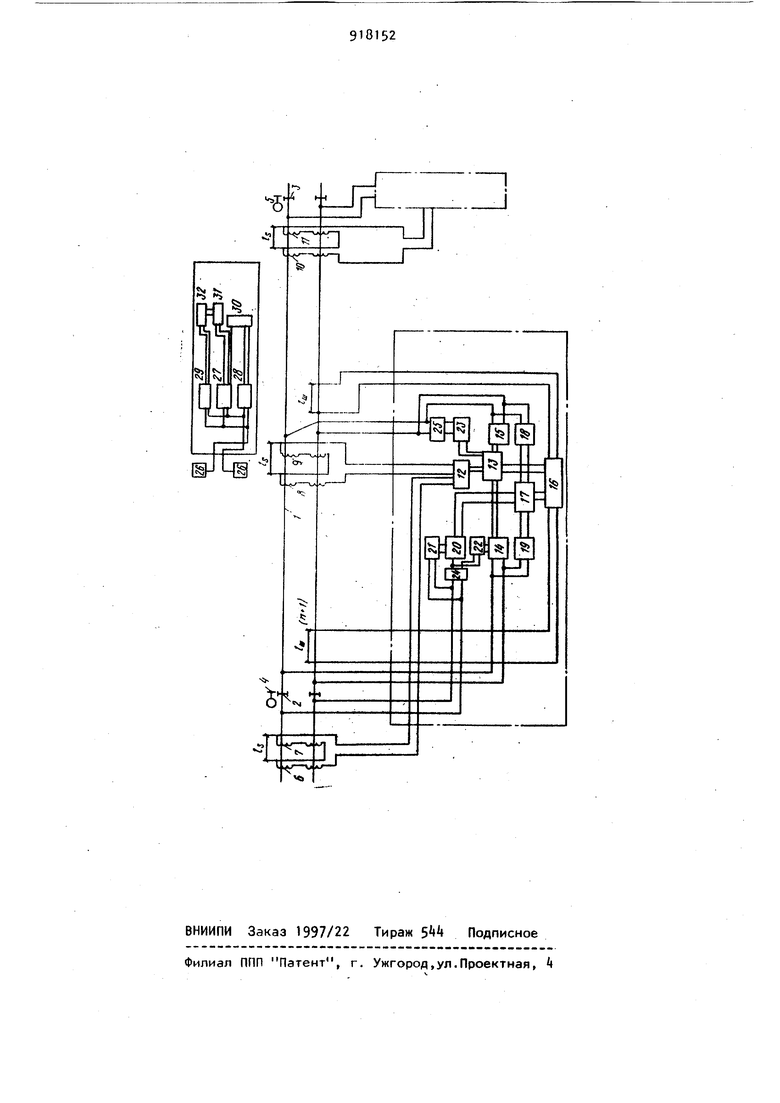
Цель достигаете тем, что датчик проследования поезда выполнен на четырех катушках, попарно размещен20ных под подошвами обоих рельсов в начале каждого измерительного участка рельсовой цепи, причем в каждой паре начала катушек соединены между .собой,, конец одной катушки одной пары соединен с концом одной катушк другой пары, а концы других катушек каиодой пары являются выходами датми ка, на локомотиве выход блока выдел НИЛ амплитудно-модулиррванного сигнала подключен к блоку коррекции длины измерительного участка. На чертеже представлена функциональная схема предложенного устройства. Оно содержит рельсовые нити 1, ограниченные изолирующими стыками 2 и 3, У которых установлены путевые светофоры и 5. В начале координатных участков устанавливаются катушки 6-11, соединенные с входом блока 12 вычисления скорости, выход которого соединен с блоком 13 формирования команд, выходы блока 13 формирования команд соединены с входом путевых блоков 1 и 15 частотной автоматической локомотивной сигнализации (ЛЛС) и входом блока 16 формирования сигналов автоматического управления тормозами (СДУТ), другой вход блока 16 САУТ подключен к выходу дешифратора 17 числовой кодовой автоблокировки, выходы которого соединены с входами передатчиков 18 и 19 числовой АЛС, а вход соединен с выходом путевого приемника 20 числовой кодовой автоблокировки, выход которого соединен с вспомогательным генератором 21. Входы путевых приемников 22 и 23 частотных рельсовых цепей подключаются к рельсовой линии гюсредством разделительных блоков 2 и 25. На локомотиве приемные катушки 26 соединены с приемником 27 частотной АЛС, приемником 28 числовой АЛС и приемниками 29 аппаратуры САУТ, причем выходы приемников 27 и 28 мастотной и числовой АЛС подключены к локомотивному светофору 30. Выход частотного приемника 27 соединен с блоком 31 выделения амплитудно-модулированного сигнала, выход которого соединен с блоком 32 коррекции длины координатных, участков. Работает устройство следующим образом. При свободности всех участков на локомотиве принимается информация в виде кода зеленого огня или желтого и движение поезда осуществляет ся без ограничения скорости. Регу94 лирование осуществляется с помощью координатной системы интервального регулирования. При этом блок-участок разбивается на п измерительных участков. Количество координатных участков выбирается исходя из длины блок-участка и необходимой точности регулирования, при этом изолирующие стыки внутри блок-участка не устанавливаются. Регулирование внутри блок-участка осуществляется при совместном использовании АЛС и САУТ. Предположим, что хвост 1-го поезда находится на () координатном измерительном участке, а подходящий 2-й поезд находится у светофора 5. С помощью катушек 8 и 9, установленных под подошвой рельсов и включенных встречно тягового тока и согласно для сигнального тока, осуществляется измерение скорости уходящего поезда. Участок,на котором производится измерение, имеет постоянную длину Ig. в этом случае скорость поезда пропорциональна времени прохода хвоста поезда по участку Ig. Измерение времени хода по участку Ig осуществляется блоком 12 вычисления скорости. Работа блока 12 вычисления скорости происходит следующим образом: при проходе последнего колесной пары поезда за катушку 9, в ней резко возрастает ЭДС, что фиксируется с помощью порогового устройства, находящегося в блоке 12 вычисления с ко-, рости. Таким образом, этим импульсом фиксируется момент вступления хвоста поезда на измерительный участок, Для увеличения помехоэ1а1ЦИ1ченности устройства на входе порогового устройства устанавливаются фильтры, настроенные на частоту генератора. При втуплении последней колесной пары поезда за приемную катушку 8, на вход второго порогового устройства будет подан импульс двойной амплитуды, так как ЭДС обоих пар катушек складываются, в результате срабатывания второго порогового устройства, имеющего более высокий порог срабатывания, будет зафиксирован мо мент ухода хвоста поезда с измерительного участка. Измеренное время преобразуется в три дискретные градации скорости. Количество градаций скорости определяется заданной степенью точности регулирования интервалов попутного следования поездов. 59 Таким образом, после определения скорости уходящего хвоста 1-го поезда регулирование движения 2-го поезда осуществляется следующим образом. Полученные дискретные градации скорости подаются в блок 13 формирования комаяд, который в зависимости от состояния координатных участков вырабатывает команды на подключение той или иной частоты, разрешающей движение по данному координатному участку. Причем частота, дающая разрешение на движение по данному участ ку, промодулирована по амплитуде. Ча тота модуляции выбирается в зависимости от полученных дискретных градаций скорости ухода хвоста 1-го поезда и формируется с помощью блока 15 частотной ЛЛС, На локомотиве записанная информация о длине впереди лежащего участ-ка корректируется блоком 32 коррекции с учетом принятого амплитуд но-модулированног.о сигнала, частота модуляции которого выделяется блоком 31. Коррекция длины впереди лежащего участка на 2-ом поезде с учетом скорости хвоста уходящего 1-го поезда осуществляется из расчета длины экстренного торможения 1-го поезда. Предложенное устройство проще известного и позволяет увеличить про пускную способность железнодорожных линий при. полном обеспечении безопас ности движения поездов. Формула изобретения Устройство для интервального регу лирования движения поездов, содержащее рельсовую цепь, на одном и другом концах которой к рельсам подк ючены передатчик и приемник частотной ичисловой кодовой автоблокировки и автоматической локомотивной сиг26нализации, датчик проследования поезда, выходы которого подключены к блоку вычисления скорости поезда, выход которого через блок формирования управляющих команд подключен к передатчикам сигналов частотной и числовой кодовой локомотивной сигнализации и к блоку фор «1рования сигналов автоматического управления тормозами, а на локомотиве размещены приемные катушки, подключенные через приемники частотной и числовой кодовой автоматической локомотивной сигнализации к локомотивному светофору и к приемнику сигналов автоматического управления тормозами . связанному с блоком коррекции длины измерительного участка, причем к приемнику частотной автоматической локомотивной сигнализации подключен блок выделения амплитудно-модулированного сигнала, отличающеес я тем, что, с целью упрощения устройства, датчик проследования поезда выполнен на четырех катушках, попарно размещенных под подошвой обоих рельсов в начале каждого измерительного участка рельсовой цепи, причем в каждой паре начала катушек соединены между собой, конец одной катушки одной пары соединен.с концом одной катушки другой пары, а концы других катушек каждой пары являются выходами датчика, на локомотиве выход блока выделения амплитудно-модулированного сигнала подключен к блоку коррекции длины измерительного участка. Источники информации, принятые во внимание при экспертизе 1. Координатная система интервального регулирования движения поездов на метрополитене. Труды МИИТ, Вып. , Системы и устройства железнодорожной автоматики и телемеханики, М., Транспорт, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоблокировки | 2019 |
|
RU2709293C1 |
| СПОСОБ ФОРМИРОВАНИЯ И ПЕРЕДАЧИ НА ЛОКОМОТИВ СИГНАЛОВ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ В АВТОБЛОКИРОВКЕ С ТОНАЛЬНЫМИ РЕЛЬСОВЫМИ ЦЕПЯМИ И ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ ОБОРУДОВАНИЯ | 2014 |
|
RU2570120C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| Система автоблокировки с тональными рельсовыми цепями | 2023 |
|
RU2796473C1 |
| УСТРОЙСТВО КОРРЕКТИРОВКИ ЛИНЕЙНОЙ КООРДИНАТЫ НАХОЖДЕНИЯ ПОЕЗДА | 2005 |
|
RU2290335C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| Устройство автоблокировки с тональными рельсовыми цепями и централизованным размещением оборудования | 2021 |
|
RU2773985C1 |
| Устройство интервального регули-РОВАНия дВижЕНия пОЕздОВ | 1979 |
|
SU816840A1 |