Изобретение относится к машинам для бесчокерной трелевки деревьев и может быть использовано в лесной промышленности.
Известна машина для трелевки деревьев, включающая самоходное шасси, на котором установлены лебедка с запасованным на ней тросом, щит и арка со съемным гидроуправляемым захватом, соединенная с рамой самоходного шасси при помощи сферического шарнира и выполненная с возможностью поворота в горизонтальной и вертикальной плоскостях от двух наклонно установленных гидроцилиндров, соединенных с рамой посредством сферических шарниров. При этом рама самоходного шасси снабжена поперечными горизонтальными направляющими (см. Авт. св. №548238, кл. А 01 G 23/08).
Данное устройство позволяет осуществлять трелевку деревьев в полуподвешенном состоянии, однако введение в конструкцию машины поперечных направляющих для стрелы и гидроцилиндров привода стрелы с шаровыми цилиндрами значительно ее усложняют.
Недостатком также является то, что ось подвеса захвата к арке с трелюемой пачкой деревьев смещена относительно задних колес машины, что приводит к неравномерному распределению нагрузки по осям машины, снижает ее проходимость и соответственно эффективность трелевки.
Известно также устройство для бесчокерной трелевки деревьев, включающее самоходное шасси, поворотную в вертикальной плоскости стрелу с челюстным захватом, выполненную в виде двух шарнирно соединенных между собой посредством ригелей рам. (см. Авт.св. №426628, кл. A 01 G 23/06).
Данное устройство позволяет перевести взятую захватом пачку деревьев в транспортное положение с помощью устройства параллелограммного типа. Недостатком машины является сложность конструкции и значительный вес.
Известна также машина для бесчокерной трелевки деревьев, включающая самоходное шасси с гидроуправляемой стрелой, снабженной челюстным захватом с гидроприводом. В данном устройстве шарнир крепления стрелы к раме шасси расположен на небольшом расстоянии от центра тяжести шасси, а на свободном конце стрелы закреплен двуплечий рычаг с гидроприводом и дугообразным упором, обеспечивающим жесткую связь стрелы с пачкой деревьев (см. Авт.св. №201822, кл. А 01 G).
Недостатком данного устройства является сложность конструкции. За счет того, что подъем пачки деревьев в транспортное положение происходит на очень большом плече от шарнира крепления стрелы, требуется большой грузовой момент гидропривода, в результате чего увеличивается вес конструкции, что отрицательно сказывается на проходимости машины.
Наиболее близким по существенным признакам и достигаемому эффекту к заявленному устройству, выбранному в качестве прототипа, является "Машина трелевочная бесчокерная ЛТ-230", изготавливаемая на ОАО "Краслесмаш", включающая самоходное шасси и раму, с жестко закрепленным на ней основанием, на котором шарнирно установлена с возможностью поворота в продольно-вертикальной плоскости стрела, в верхней части которой смонтирован челюстной захват.
В данном устройстве более равномерное распределение нагрузок от действия веса захвата с трелюемой пачкой деревьев на ходовую часть машины при грузовом ходе достигается за счет значительного смещения захвата вперед по козу машины.
Однако и эта машина не лишена недостатков: при волочении трелюемой пачки деревьев по земле возникает тяговое усилие, которое передается на машину через шарнир подвеса захвата к стреле, расположенный на большой высоте относительно опорной поверхности машины, что создает при грузовом ходе большой опрокидывавший момент, значительно ухудшающий распределение нагрузок на ходовую часть машины. В результате этого снижается ее проходимость, а высокое расположение шарнира подвеса захвата относительно опорной поверхности машины отрицательно влияет на ее боковую устойчивость.
Кроме того, конструкция стрелы не обеспечивает регулирование положения захвата в продольном направлении, что затрудняет взятие захватом пачки деревьев с земли.
Перечисленные выше недостатки способствуют снижению эффективности трелевки. В предлагаемой конструкции машины для бесчокерной трелевки деревьев эти недостатки устранены.
Предлагаемое изобретение - машина для бесчокерной трелевки леса - включает самоходное шасси с рамой и установленную на ней с возможностью поворота в продольно-вертикальной плоскости стрелу. Согласно решению, в верхней части стрелы шарнирно смонтированы рукоять с ротатором и захватом, а в нижней части стрелы смонтирован ложемент, связанный со стрелой посредством блока шарниров, причем ложемент снабжен демпферами, один из которых связан с блоком шарниров, а другие кинематически соединены со стрелой, при ртом стрела выполнена Г-образной формы.
Кроме того:
- форма днища ложемента соответствует радиусу округления челюстей захвата;
- ложемент снабжен опорными стойками;
- днище ложемента и опорные стойки снабжены амртизаторами.
Сопоставительный анализ с прототипом позволил выявить следующие отличительные признаки:
- в верхней части стрелы шарнирно смонтированы рукоять с ротатором и захватом;
- в нижней части стрелы смонтирован ложемент;
- ложемент снабжен демпферами;
- один из демпферов связан с блоком шарниров;
- другие демпферы кинематически связаны со стрелой;
- стреле имеет Г-образную форму.
Как видно из сопоставительного анализа, выявленная совокупность существенных отличительных признаков является новой, поэтому правомерен вывод о том, что влияние этой совокупности признаков на достигаемый предполагаемым изобретением результат неизвестен и, следовательно, предлагаемое изобретение соответствует критерию "новизна".
Анализ патентной и научно-технической документации в области лесной и лесозаготовительной промышленности, проведенный по фондам КарЦНТИ и отдела главного конструктора ОАО "ОТЭ" показал, что предложенное техническое решение выходит за пределы существующего уровня техники в данной области. Следовательно, его можно признать соответствующим критерию "изобретательский уровень".
Задачей заявляемого технического решения является повышение эффективности трелевки.
Техническим результатом, позволяющим решить данную задачу, является повышение проходимости за счет равномерного распределения нагрузки на кодовую часть машины, и повышение боковой устойчивости машины при грузовом ходе. Решение задачи обеспечивается за счет того, что в верхней части стрелы Г-образной формы шарнирно установлена рукоять с ротатором и челюстями, а в нижней части смонтирован ложемент, связанный со стрелой посредством блока шарниров, а также установкой в ложемента демпферов, один из которых связан с блоком шарниров, а другие кинематически соединены со стрелой.
Выявленная совокупность существенных признаков придает заявляемому техническому решению новые свойства, позволяющие решить поставленную задачу.
Предлагаемое устройство может быть изготовлено в промышленных условиях цехов больших заводов или специализированных малых предприятий с использованием стандартного оборудования.
Следовательно, заявляемое устройство соответствует критерию "промышленная применимость".
Предлагаемая машина для бесчокерной трелевки деревьев поясняется чертежами, где представлено на:
фиг.1 - заявляемая машина для бесчокерной трелевки деревьев (вид сбоку);
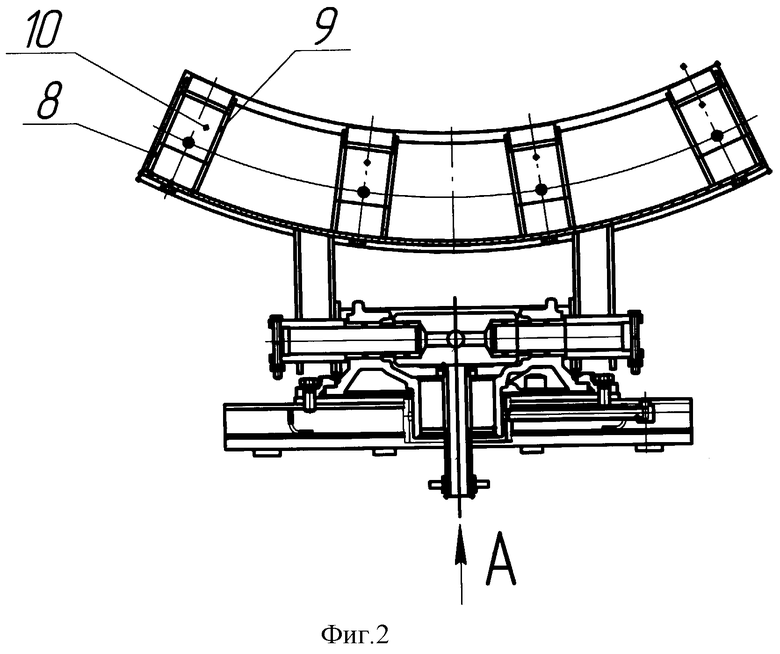
фиг.2 - ложемент с блоком шарниров (вид спереди);
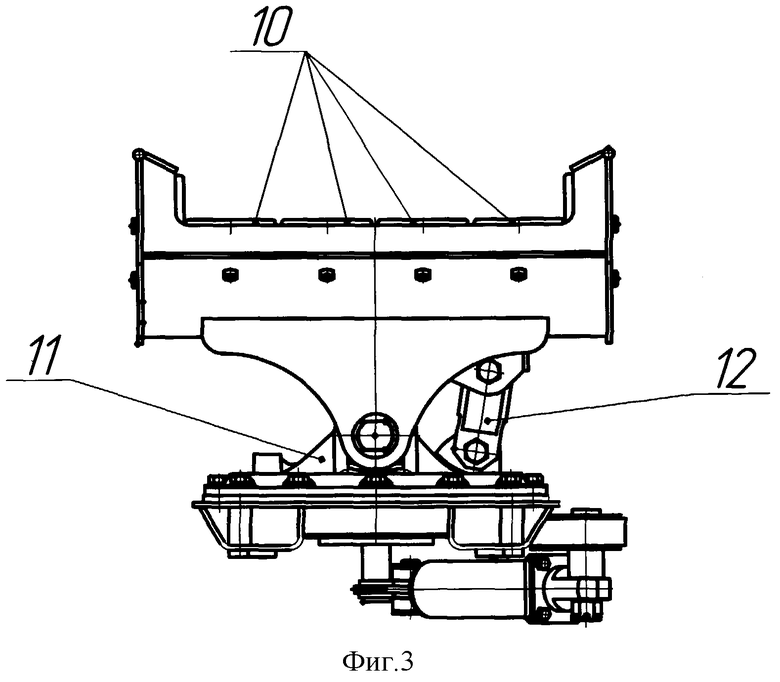
фиг.3 то же (вид сбоку);
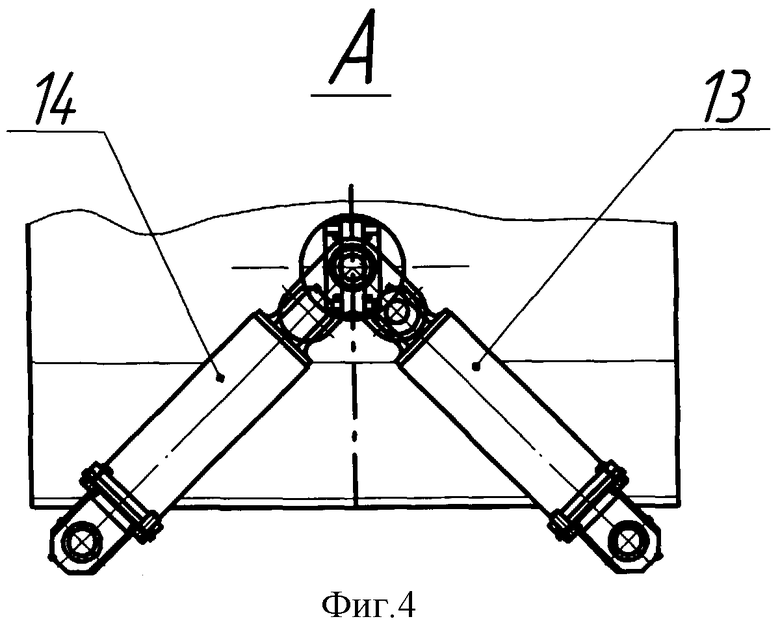
фиг.4 то же (вид снизу).
Заявляемая машина для бесчокерной трелевки деревьев содержит шасси 1, и смонтированную на ней раму 2, на которой установлена гидроуправляемая Г-образной формы стрела 3. На верхнем конце стрелы 3 шарнирно закреплена гидроуправляемая рукоять 4 с ротатором 5 и захватом 6. На нижнем конце стрелы 3 смонтирован ложемент 7 с днищем (не обозн.), выполненным по радиусу R, соответствующим радиусу скругления челюстей захвата 6, и с опорными стойками 8 и 9, на которых закреплены амортизаторы 10. Ложемент 7 связан со стрелой 3 посредством блока шарниров 11, в внутри ложемента установлены демпФеры 12, 13 и 14.
Машина для бесчокерной трелевки леса работает следующим образом:
При холостом ходе оператор укладывает захват 6 в ложемент 7, а скругленное по радиусу R днище ложемента 7 обеспечивает фиксацию захвата относительное корпуса машины, при этом челюсти захвата ″лежат″ не амортизаторах 10.
При трелевке машина задним ходом подходит к комлям пачки деревьев, подготовленной к трелевке. Оператор, управляя гидроприводами стрелы 3 и рукояти 4, укладывает захват 6 с раскрытыми челюстями на пачку деревьев таким образом, чтобы комли трелюемых деревьев выступали относительно челюстей захвата 6 приблизительно на 0,5-0,8 метра. Челюсти захвата 6 смыкаются и закрепляют пачку деревьев в захвате. Посредством гидропривода рукояти 4 оператор подтягивает трелюемую пачку деревьев к метине, а затем с помощью гидропривода стрелы 3 переводит трелюемую пачку в транспортное положение и укладывает ее в ложемент 7. При этом челюсти захвата 6 опираются на амортизаторы 10 ложемента 7. Положение захвата 6 относительно ложемента 7 в процессе его укладки оператор регулирует включением заднего хода машины.
При грузовом ходе оператор устанавливает гидроприводную рукоять 4 в плавающее положение, и захват 6 с трелюемой пачкой деревьев и ложементом 7 свободно поворачивается относительно стрелы 3. Нагрузки, возникающие при грузовом ходе от веса захвата 6 с пачкой деревьев, и тяговые усилия, возникающие от волочения пачки деревьев по земле, передаются через оси (не обозн.) крепления ложемента 7, и блок шарниров 11, на машину, а амортизаторы 10 опорных стоек 8 и 9 смягчают эти нагрузки.
При этом обеспечивается равномерное распределение нагрузок на ходовую часть машины и повышается ее боковая устойчивость.
На разгрузочной площадке оператор с помощью рукояти 4 снимает захват с пачкой деревьев с ложемента, включает гидропривод (не показан) стрелы 3, и движением машины вперед сбрасывает пачку деревьев на землю.
Боковая устойчивость машины при движении ее на уклонах повышается путем обеспечения жесткой фиксации челюстей захвата 6 с трелюемой пачкой деревьев в боковом направлении, которая достигается за счет соответствия формы днища ложемента 7 радиусу округления челюстей захвата 6.
Дополнительным преимуществом предлагаемой машины является ее высокая маневренность при грузовом ходе, которая достигается за счет кинематической связи ложемента 7 с основанием стрелы 3 посредством блока шарниров 11, которая обеспечивает свободное поворачивание ложемента 7 с трелюемой пачкой деревьев относительно машины в горизонтальной плоскости на угол до 90 градусов и качение его в продольной вертикальной плоскости.
Заявляемая машина обладает следующими преимуществами:
- высокой проходимостью;
- боковой устойчивостью при работе на уклонах;
- высокой маневренностью;
- повышенной эффективностью трелевки.
| название | год | авторы | номер документа |
|---|---|---|---|
| А. В. Фролов, В. П. Брюханов, И П. Матвеев, К- Г. Федосеев, В. П. Старков, Г. И. Ходаковский, И. Ф. Герасин, Ю. К. Сысоев, А. И. Евсиков и В. М. ВласовЗая.витель Центральный научно-исследовательский и проектно-конструкторский институт механизации и энергетики лесной промышленности | 1967 |
|
SU201822A1 |
| Машина для бесчокерной трелевки деревьев в полуподвешенном состоянии | 1981 |
|
SU948713A1 |
| Трелевочная машина | 1990 |
|
SU1794711A1 |
| УСТРОЙСТВО ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1993 |
|
RU2083391C1 |
| МАШИНА ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 2011 |
|
RU2465765C1 |
| Трелевочная машина | 1980 |
|
SU918263A1 |
| Устройство для бесчокерной трелевки леса | 1986 |
|
SU1359176A1 |
| МАШИНА ДЛЯ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1992 |
|
RU2061604C1 |
| Транспортное средство для трелевки деревьев | 1980 |
|
SU927589A1 |
| УСТРОЙСТВО ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ЛЕСА | 2012 |
|
RU2494608C1 |
Изобретение относится к машинам для бесчокерной трелевки деревьев и может быть использовано в лесной промышленности. Машина для бесчокерной трелевки леса включает шасси и смонтированную на нем раму. На раме установлена гидроуправляемая Г-образной формы стрела. На верхнем конце стрелы шарнирно закреплена гидроуправляемая рукоять с ротатором и захватом. На нижнем конце стрелы смонтирован ложемент с днищем, выполненным по радиусу R, соответствующим радиусу челюстей захвата, и с опорными стойками, на которых закреплены амортизаторы. Ложемент связан со стрелой посредством блока шарниров, а внутри ложемента установлены демпферы. Это позволит повысить проходимость, боковую устойчивость машины при работе на уклонах, высокую маневренность. 3 з.п. ф-лы, 4 ил.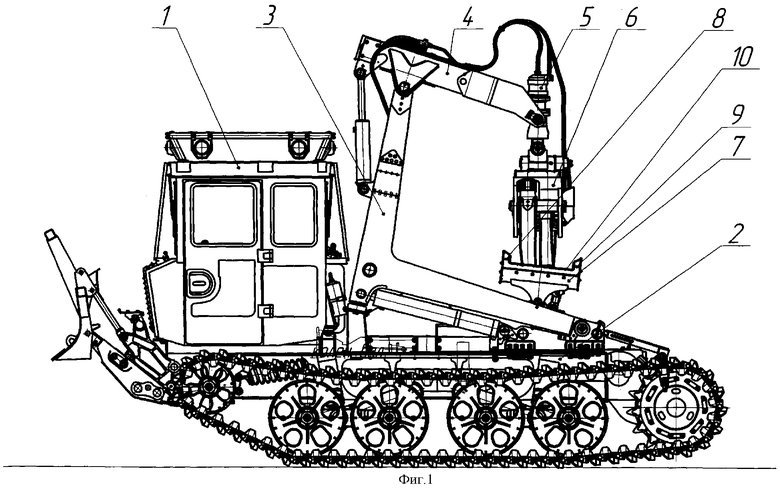
| А. В. Фролов, В. П. Брюханов, И П. Матвеев, К- Г. Федосеев, В. П. Старков, Г. И. Ходаковский, И. Ф. Герасин, Ю. К. Сысоев, А. И. Евсиков и В. М. ВласовЗая.витель Центральный научно-исследовательский и проектно-конструкторский институт механизации и энергетики лесной промышленности | 0 |
|
SU201822A1 |
| Машина для трелевки деревьев | 1975 |
|
SU548238A1 |
| МАШИНА ДЛЯ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 0 |
|
SU338436A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 0 |
|
SU371890A1 |

