(54) ЗАХВАТ-КЛНТОВАТЕЛЬ ДЛЯ БОЧЕК К ЭЛЕКТРОПОГРУЗЧИКУ
I
Изобретение относится к подъемно- транспортной технике я может быть пользовано как навесное оборудование к эпектрошвтопогрузчикам для выпотаенкя работ в различных областях народного . хозяйства, в частности, для захвати, кан тования и транспортирования грузов, yiaaкованных в деревянные бочки.
Известен захва г-канто&атепь к эяек- тропогрузчику, содержавши установшнную на каретке эпектршогрузчнка поворотную вокруг горизонтальной оси раму, связанную с плитой, на которой устаиавйенйе возможностью перемещения друг ч тнос« тельно друга по горизонтали аа хваты, к концам которых шарнирно {фиг соединены кОпошш с механизмом iix, cctMO установки 1 J
Недостаток известного устройства со- JQ стонт в том, что оно не обеспечивает ДоС1 аточной производительности .при работе с грузами, например, бочками, разлачгйдми по высоте, ширине и конфигурации.
Цепь изобретения - повышение произ1водитепьиости.t
Поставленная цепь достигается тем, что кажда1й боковой захват выполнен из неподвижной и подвижш й по вертакапи относительно nepBdl лап, при этом каждая 1шпаустановлена с возможностью поворота вокруг своей продольной оси oi носительно другой.
Кроме того, механизм самоустановки кояодок вьшолнен в виде снабженного сухарем упругого элемента, один конец которого закреплен на колодке, а другойна захвате, кото1л 1й кдполнен с пазом для размещения в нем сухаря при захвате бочки и установлен на кажд из упо М1шут)ых лап. Повторная рама может быть соединена с плитой посредств « обеспечивающего поворот вокруг вертикальной оси шаршара и симметрично расположенных относительно него пружинных упоров.
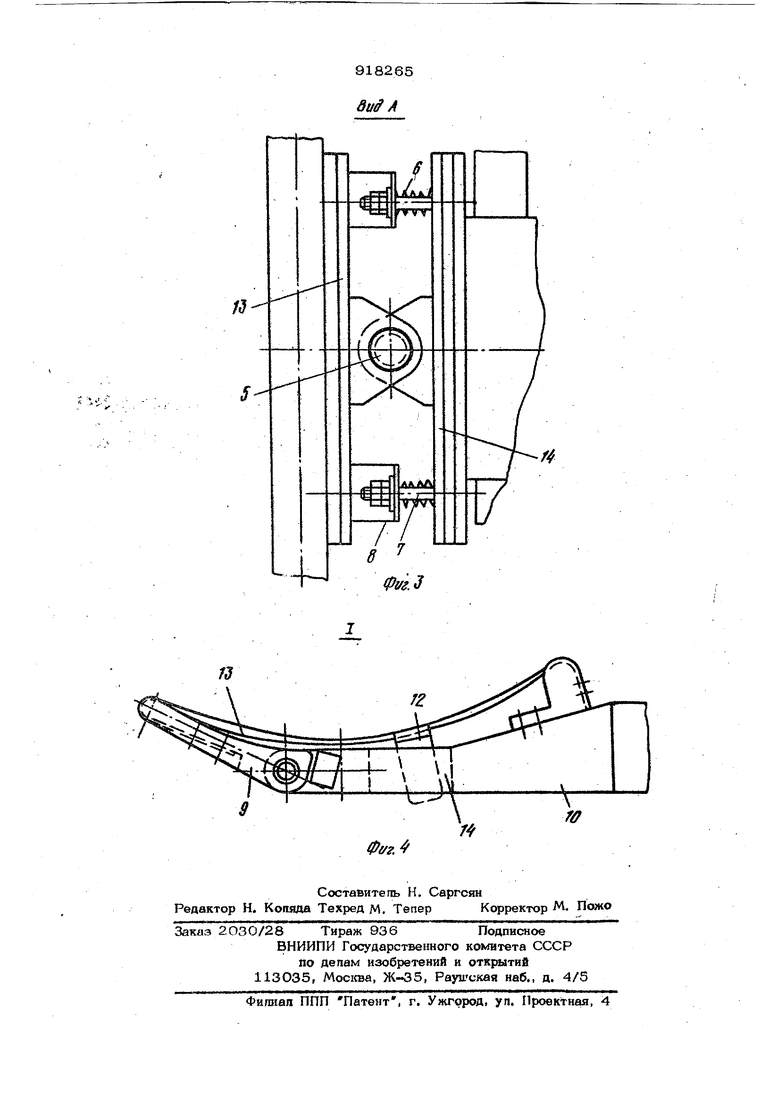
На фаг. 1 показан захва -жантоватеиь для бочек к электропог1узчи1су, вид сбоку; на . 2 - то же, вид в плане; иа 39J82 фиг. 3 - вид А на фиг, 1; на фиг. 4 узел 1 на фиг. 2. Захват-кантоватепь для бочек к эпектропогрузчику состоит из ппиты 1, связанной с поворотной вокруг гортзонтапь- 5 ной оси рамой 2, смонтированной на каретке 3 эпектропогрузчика 4, Ппита 1 соединена с поворотной рамой 2 шарниром 5, обеспечивающим поворот ппиты 1 вокруг вертикальной оси, и симметрично О расположенными относительно этого шарнира пружинными упорами, состоящими ив пружины 6, установленной на направляюшую 7 и скобы 8, ограничивающей растяжение пружины 6, На 1 15 смонтированы боковые захваты с возмож-. ностью перемещения относительно друг друга по горизонтапга. Захваты снабжены колодками 9, шарнирно установленными на их концах и выполнены из неподвиж- И) ных 10 и подвижных 11 по вертикали относительно первых лап. При этом неподвижные 1О и подвижные 11 лапы смонтированы с возможностью поворота вокруг своей продольной оси одна относительно 15 другой внутрь и наружу на угол cd 8-lOМеханизм колодок выполнен в виде снабженного сухарем 12 упругого элемента 13, один конец которого закреппен на колодке 9, а другой на захвате. 30 При этом лапы 10 и 11 выполнены с пазом 14, в котором размещается сууарь 12 при захвате бочки. Захваг-кантователь 1эаботает следующим образом. 35 Электропогрузчик подводится к бочке из расчета ориентации оси симметрии прижимных лап захвата по центру бочки. При этом не требуется бопьщой точности ориентации, так как предложенная конструкция бочкоподъемника допускает сме- щение его продольной оси относительно оси бочки до 150 мм. Электропогрузчик подводится до упора бочки в упругий элемент 13 затем включается привод лап, которые сближаются и сухарь 12 утапливается в паз 14 внутренней части захвата. В итоге обеспечи- вается плотное облегание бочки упру- гими элементами 13 в области крьипки И днища бочки с равномерным распреде- лением усилия зажима по плошади охвата. Ecjm продольные оси электропогрузчика и бочки не совпадают, а смешение осей лежит в вышеуказанных пределах, то при подводе электропогрузчика в мо- мент касания бочки левой или правой пар)ами лап за счет шарнирного соединения ппиты 1 с поворотной рамой 2 пругкин54ные упоры сжимаются и рама 1 повора- чивается, перемещая папы в наорав пении, обеспечиваклдем охват смещенной бочки, Это позволяет избежать повреждения боч ки, снижает требования к точности предверительного ориентирования эпектропогрузчика относительно бочки, что уменьшает время захвата бочки и, спедоватепьно, ведет к повыщению производитепЬьности погрузочно разгрузочных работ. При погрузке и разгрузке бочек, транспортируемых в железнодорожных вагонах, возможности маневрирования электропогрузчика весьма ограничены. Исходя из условия по крайней мере сохранения лроизводительности погрузки-разгрузки бочек, обеспечиваемой при выполнении аналогич работ на открытых ллощадях где маневрирование возможно в щироких пределах, в рассматриваемой ситуации отсут ствие шарнирнр крепления плиты 1 к поворотной раме 2 привело бы к увеличению количества поврежденных бочек, т.е, к снижению надежности захвата, под понимается совокупность некоторых действий, обеспечивающих в совокупности собственно захват и последующее транс портирование бочки без каких-либо повреждений к месту штабелирования, захвата бочки пружинные упоры совместят продольные оси захватов и элек- тропогрузчика, а поворотная рама 2 повернет зажатую бочку при необходимости на угол 180 , после чего бочка транс- портируется из вагона к месту штабелирования или наоборот. Жесткость пружин выбирается, с одной стороны, из условия исключения колебаний бочки при транснортировании, а с другой стороны, исходя из требования сохранения целостности бочкн в случае соударение с какими-либо предметами при маневрировании, например, внутри вагона, что в итоге ведет к повышению надежности захвата. После перевозки к месту штабелирования палы разводятся, бочка освобождается и операция погрузки-разгрузки считается законченной, , Ожидаемый экономический эффект со ставит 15 тыс. руб. в год на один захват кантователь. Формула изобретения 1. Захват-кантователь для бочек к электропогр ЗЧИ10Г, содержащий уставовленную на каретке электропогрузчика поворотную вокруг горизонтальной оси раму, связанную с плитой, на которой установлены с возможностью пе юмеше- ния друг относитепъно друга по горизонтали боковые захваты, к концам которых шарннрно присоединены колодки с механизмом их самоустановки, отличающийся тем, что, с целью повышения производительности, каждый боковой захват выполнен из неподвижной и подвижной по вертикали относительно первой пап, при этом каждая лапа установлена с возможностью поворота вокруг своей Ьродольной оси относительно другой. 2. Захват-кантователь по п. 1, о т,- личаюшийся тем, что механизм самоустановки колодок выполнен в виде снабженного сухарем упругого элемента,
ю /
(руг.
Wi а один конец которого закреплен на колодке, а другой - на захвате, который выполнен с пазом для размещения в нем упомянутого сухаря при захвата бочки, и установлен на каждой из упомянутых пап. 3. Захват кантователь по п. 1, о т - ли чающийся тем, что поворотная рама соединена с плитой посредством обеспечивающего поворот вокруг вертикальной оси шарнира и симметрично расположенных относительно него пружинных упоров. Источники информации, принятые во внимание при экспертизе 1. Патент США Ng 318О672, кл. 294-88, 1965 (прототип).
918265 duff А

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь для бочек к электропогрузчику | 1984 |
|
SU1221207A2 |
| Захват-кантователь для бочек к погрузчику | 1986 |
|
SU1428688A1 |
| Захват-кантователь погрузчика | 1979 |
|
SU867872A1 |
| Захват для бочек к погрузчику | 1987 |
|
SU1458311A1 |
| Захват для бочек к погрузчику | 1983 |
|
SU1105456A1 |
| ЗАХВАТ К ПОГРУЗЧИКУ ДЛЯ ДЕРЕВЯННЫХ БОЧЕК | 1968 |
|
SU220838A1 |
| ЗАХВАТ К ПОГРУЗЧИКУ ДЛЯ ДЕРЕВЯННЫХ БОЧЕК | 1971 |
|
SU307056A1 |
| КАНТОВАТЕЛЬ ДЛЯ БОЧЕК С КОНЦЕВЫМИ ОБРУЧАМИ | 2004 |
|
RU2258659C1 |
| Сменное грузозахватное приспособление к вилочному погрузчику | 1982 |
|
SU1068382A1 |
| Устройство для захвата двух бочек | 1986 |
|
SU1375557A1 |