Изобретение относится к подъемно- транспортной технике и может быть использовано как навесное оборудование к авто- и электропогрузчикам для захвата и транспортировки группы цилиндрических грузов,, преимущественно бочек..
Цель изобретения - повышение производительности путем сокращения времени захвата груза.
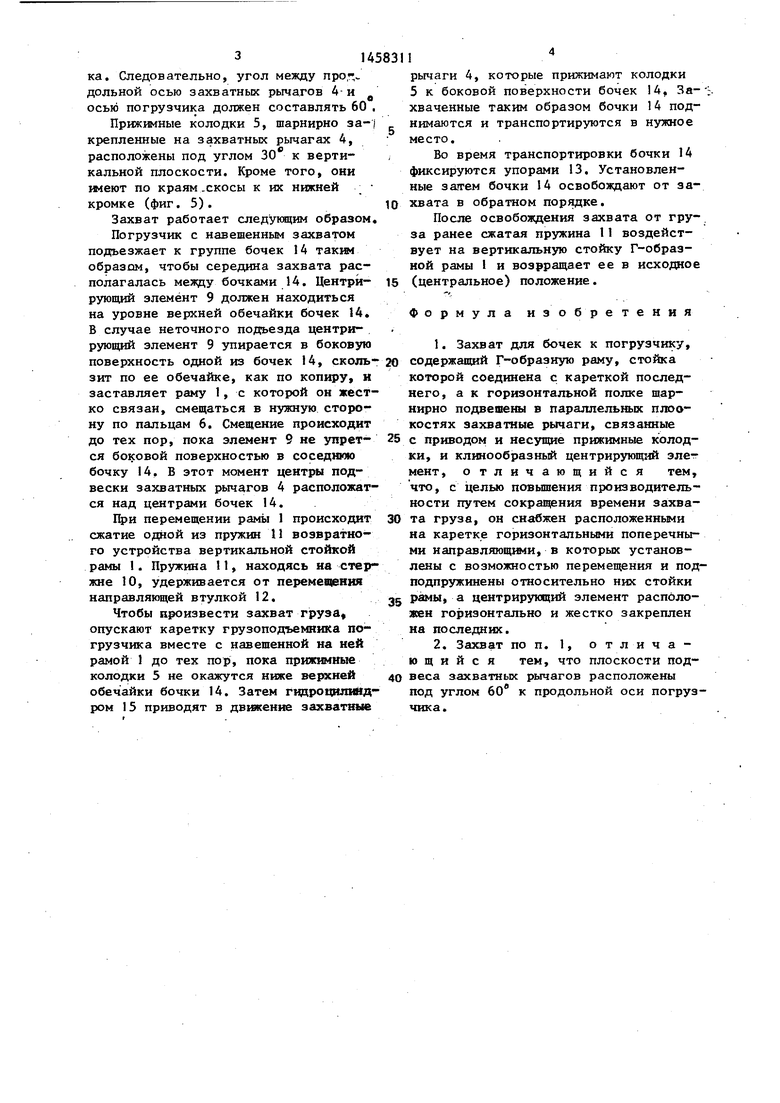
На фиг. 1 изображен захват, вид сбоку; на фиг. 2 - то же, вид сверху на фиг. 3 - вид А на фиг. I; на фиг. 4 - вид Б на фиг. 2; нафиг. 5- вид В на фиг„ 4; на фиг. 6 - схема расстановки бочек при хранении (перевозке) в вертикальном положении.
Захват для бочек погрузчику содержит Г-образную раму 1, к которой посредством универсальных шарниров 2 крепятся грузовые тргшерсы 3 с захватными рычат ами 4 и прижимными колодками 5, установленными шарнирно на рычагах„4. Г-образная рама 1 установлена при помощи пгшьцев 6 с возмож ностью перемещения по ним на переходной плите 7, которая навешивается на каретку погрузчика. Ка поперечной балке 8 Г-образной рамы 1 жестко закреплен своим основанием клинообразный центрирующий элемент 9. Между вертикгшьными стойками Г-образной рамы 1 установлено возвратное уст
5 10
.
0
ройство, состоящее из стержня 10, пружин 11 и направляющей втулки 12, в которой имеет возможность перемещаться стержень 10. Эта втулка 12 разделяет пружины 11 и закреплена на переходной плите 7. Стержень 10 концами упирается в вертикальные с/гойки Г-образной рамы 1. В нижней части рамы 1 имеются упоры 13, служащие для удержания бочек 14 при их транспортировке погрузчиком. Захватные рычаги 4 вместе с прижимными колодками 5, которые имеют изогнутую форму, приводятся в движение гидроцилиндрами 15, питающимися от гидросистемы погрузчика. Изогнутая форма колодок 5 необходима для увеличения площади контакта с боковой поверхностью бочки 14 и ее обечайки.
Траверсы 3 с захватньми рычагами 4 закреплены на Г-образной раме 1 при помощи универсального шарнира 2 под углом 60 относительно продольной оси погрузчика.
Такое положение захватных рычагов 4 обусловлено расположением бочек 14 (фиг. б). Если бочки 14 стоят со смещением, то свободное пространство минимально и имеет форму вогнутого равностороннего треугольника. В идеальном случае продольная ось захватных рычагов 4 должна находиться на биссектрисе угла указанного треугольни3U
ка. Следовательно, угол между про,,- дольной осью захватных рычагов 4-и осью погрузчика должен составлять 60 ,
Прижимные колодки 5, шарнирно за-) крепленные на захватных рычагах 4, расположены под углом 30 к вертикальной плоскости. Кроме того, они имеют по краям-СКОСЫ к их нижней кромке (фиг. 5).
Захват работает следукицим образом.
Погрузчик с навешенным захватом подъезжает к группе бочек 14 таким образом, чтобы середина захвата располагалась между бочками 14. Центрй- рующий элемент 9 должен находиться на уровне верхней обечайки бочек 14. В случае неточного подьезда центрирующий элемент 9 упирается в боковую поверхность одной из бочек 14, сколь- зит по ее обечайке, как по копиру, и заставляет раму 1, с которой он жестко связан, смещаться в нужную сторону по пальцам 6. Смещение происходит до тех пор, пока элемент 9 не упрет- ся боковой поверхностью в соседнюю бочку 14. В этот момент центры подвески захватных рычагов 4 расположатся над центрами бочек 14.
перемещении рамь 1 происходит сжатие одной из пружин 11 возвратного устройства вертикальной стойкой рамы 1. Пружина 11, находясь на стержне 10, удерживается от перемещения направляющей втулкой 12.
Чтобы произвести захват груза опускают каретку грузоподъемника погрузчика вместе с навешенной на ней рамой 1 до тех пор, пока прижимные колодки 5 не окажутся ниже верхней обечайки бочки 14. Затем гидрощшийд- ром 15 приводят в движение захватные
1
рычаги 4, которые прижимают колодки 5 к боковой поверхности бочек 14, Захваченные таким образом бочки 14 поднимаются и транспортируются в нужное место.
Во время транспортировки бочки 14 фиксируются упорами 13. Установленные затем бочки 14 освобождают от захвата в обратном порядке.
После освобождения захвата от груза ранее сжатая пружина 11 воздействует на вертикальную стойку Г-образ- ной рамы 1 и возрращает ее в исходное (центральное) положение.
формула изобретения
1.Захват для бочек к погрузчику, содержащий Г-образную раму, стойка которой соединена с кареткой последнего, а к горизонтальной полке шарнирно подвешены в параллельных плоо- костях захватные рычаги, связанные
с приводом и несущие прижимные колодки, и клинообразный центрирующий элет- мент, о тличающийся тем, что, с целью повьш ения производительности путем сокращения времени захвата груза, он снабжен расположенными на каретке горизонтальными поперечными направляющими, в которых установлены с возможностью перемещения и под подпружинены относительно них стойки рамы, а центрирующий элемент расположен горизонтально и жестко закреплен на последних.
2.Захват по п. 1, отличающийся тем, что плоскости подвеса захватнык рычагов расположены под углом 60 к продольной оси погрузчика.
Фиа.3
MS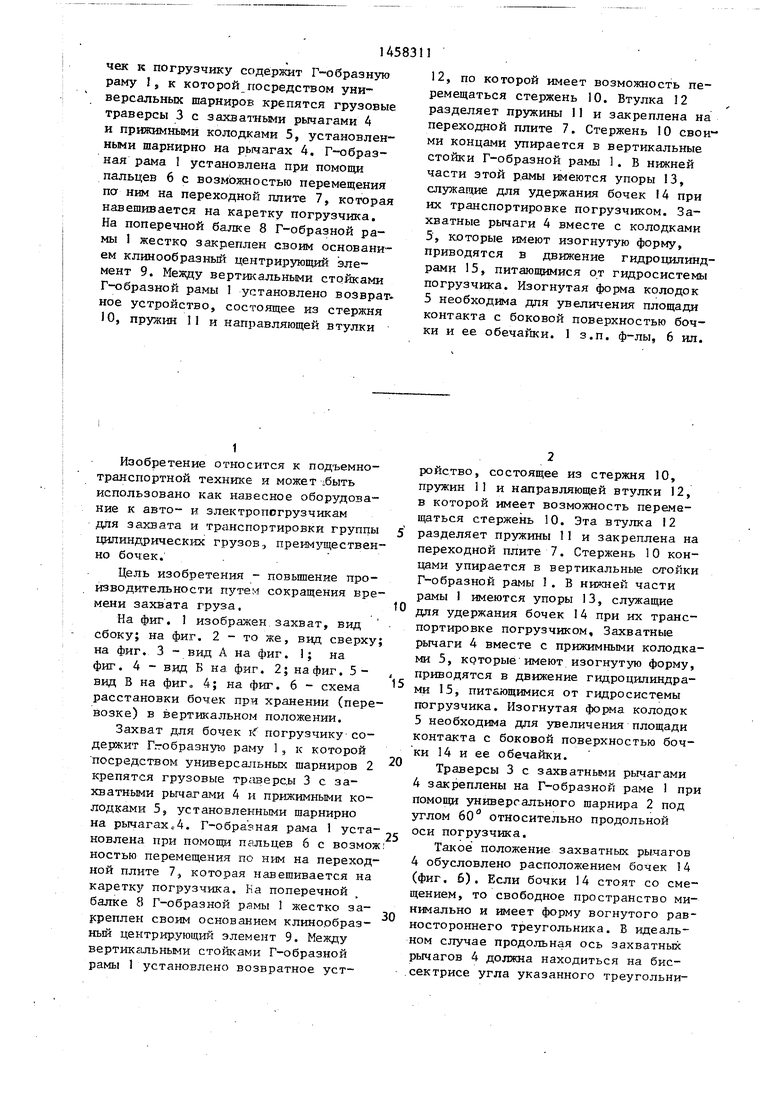
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для бочек к погрузчику | 1988 |
|
SU1576481A1 |
| Устройство для захвата двух бочек | 1986 |
|
SU1375557A1 |
| Захват-кантователь для бочек к электропогрузчику | 1980 |
|
SU918265A1 |
| Захват-кантователь для бочек к электропогрузчику | 1984 |
|
SU1221207A2 |
| ЗАХВАТ К ПОГРУЗЧИКУ ДЛЯ ДЕРЕВЯННЫХ БОЧЕК | 1968 |
|
SU220838A1 |
| Ручная тележка | 1984 |
|
SU1227542A1 |
| Захват-кантователь для бочек к погрузчику | 1986 |
|
SU1428688A1 |
| ЗАХВАТ К ПОГРУЗЧИКУ ДЛЯ ДЕРЕВЯННЫХ БОЧЕК | 1971 |
|
SU307056A1 |
| Захватное устройство для бочек с упорами | 1985 |
|
SU1382809A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ | 1991 |
|
RU2029728C1 |
Изобретение относится к подъемно-транспортной, технике и может быть использовано как навесное оборудова,- ние к авто- и электропогрузчикам для захвата и транспортировки группы цилиндрических грузов, преимущественно бочек. Цель изобретения - повышение производительности путем coкpaD eния времени захвата груза. Захват для бо
| Арторское свидетельство СССР I 1158475, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
