Изобретение относится к подъемно- транспортным устройствам, в частности к навесному оборудованию для вилочных погрузчиков, используемых для погрузочно-разгрузочных работ на перевозке металлических бочек.
Цель изобретения - повышение производительности.
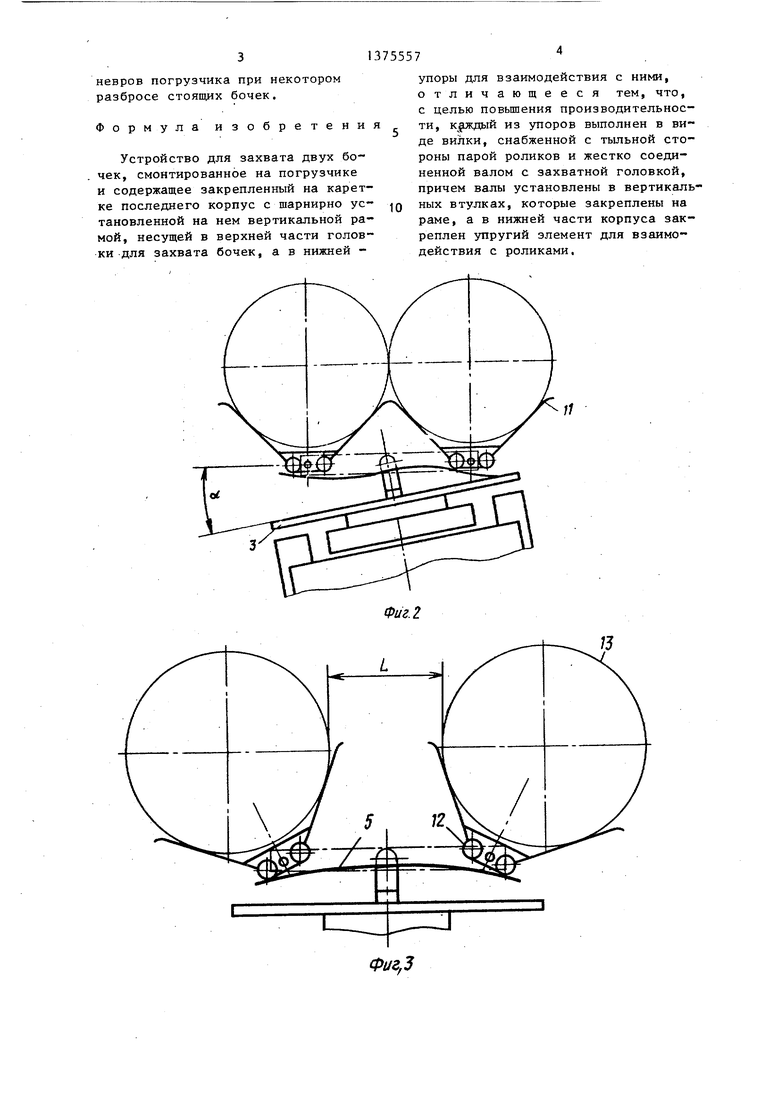
На фиг. 1 изображено устройство, смонтированное на электропогрузчике ЭП-103, аксонометрия; на фиг, 2 - то же, вид сверху (захватные головки не показаны), вариант захвата бочек под углом о( между плитой каретки и плоскостью, касательной к боковьм поверхностям двух бочек; на фиг. 3 - то же, вариант захвата погрузчиком двух бочек, стояпщх на расстоянии L друг от друга; на фиг. 4 - то же, вариант захвата двух бочек, стоящих рядом друг с другом, где tn - расстояние между осью погрузчика и общей касательной двух бочек; на фиг. 5 - положение нижнего и верхнего крюкового зацепа в момент фиксации бочки.
Устройство состоит из корпуса 1, закрепленного захватами 2 на плите каретки 3 погрузчика. На корпусе 1 выполнены кронштейны 4, а в нижней части закреплен плоский упругий элемент в виде пластинчатой пружины 5. Пружина в центре закреплена на корпусе, при этом упругие свойства проявляют ее свободные концы.
В кронштейнах 4 на осях 6 шарнир- но установлена рама 7 с двумя вертикальными втулками 8 для валов 9. В верхней части рамы 7 имеются две захватные головки 10, а в нижней части - два упора, вьшолненные в виде вилок 11. Причем захватные головки 10 и вилки 11 жестко закреплены соответственно на верхнем и нижнем концах валов 9.
На тыльной стороне вилок 11 симметрично относительно оси вала 9 установлены ролики 12, которые уста- .новлены с возможностью взаимодействия с пружиной 5. Захват для бочек 1.3 содержит нижний 14 и верхний 15 крюковые зацепь, кинематически связанные друг с другом.
Устройство работает следующим об- разом.
Погрузчик подъезжает к ряду бочек 13j стоящих на торце, таким образом, чтобы одна или две бочки ока0
5
0
5
0
зались в створах валов 11, а нижние крюковые зацепы 14 упирались в стенки бочек несколько ниже окантовочных поясов о.
Медленно приподнимают каретку 3. При этом зацеп 14, скользя вверх по стенке бочки, достигает окантовоч- ного пояса и поворачивается до тех пор, пока не произойдет взаимное сближение его с верхним крюковым , зацепом 15 и захват края окантовоч- ного пояса (фиг. 5). Далее каретка 3 с бочками 13 поднимается на высоту, необходимую для транспортировки, и погрузчик переезжает к месту выгрузки. Каретка 3 опускается, бочки 13 касаются дном пола и при дальнейшем замедленном опускании каретки окан- товочный пояс давит на верхний крюковой зацеп 15, освобождая бочки от захватных головок 10.
Предлагаемым устройством.одновременно захватывают две бочки и в том случае, если погрузчик подъезжает к ряду стоящих бочек так, как показано на фиг. 2, т.е. вертикальная поверхность каретки 3 расположена под углом d к плоскости, касательной к боковым поверхностям двух захватываемых бочек ( о( не более 8 ), или как показано на фиг. 3 и 4, когда две бочки отстоят друг от друга на расстоянии L не более 300 мм или бочки касаются друг друга. Смещение оси погрузчика относительно общей касательной к бочкам составляет величину m не более 150 мм.
Вилки 11 взаимодействуют с боковыми поверхностями бочек и поворачиваются вместе с валами 9 и захватными головками 10, разворачивая одновременно раму 7 на осях 6 относительно корпуса 1. В каждой паре ро- 5 ликов 12 один упирается в пружину 5, другой выходит из контакта с ней, создавая на валах 9 и осях 6 моменты, которые благодаря упругости пружины 5 возвращают раму 7 и вилки 11 в исходное положение после захвата бочек.
Предлагаемое устройство по сравнению с известным позволяет повысить производительность труда при работе на электропогрузчике, так как отпадает необходимость специально фор- мировать ряд бочек для их захвата, а также уменьшается количество ма5
0
0
невров погрузчика при некотором разбросе стоящих бочек.
Формула изобретени
Устройство для захвата двух бочек, смонтированное на погрузчике и содержащее закрепленный на каретке последнего корпус с шарнирно ус- тановленной на нем вертикальной рамой, несущей в верхней части головки для захвата бочек, а в нижней упоры для взаимодействия с ними, отличающееся тем, что, с целью повьшения производительности, из упоров выполнен в виде вилки, снабженной с тыльной стороны парой роликов и жестко соединенной валом с захватной головкой, причем валы установлены в вертикальных втулках, которые закреплены на раме, а в нижней части корпуса закреплен упругий элемент для взаимодействия с роликами.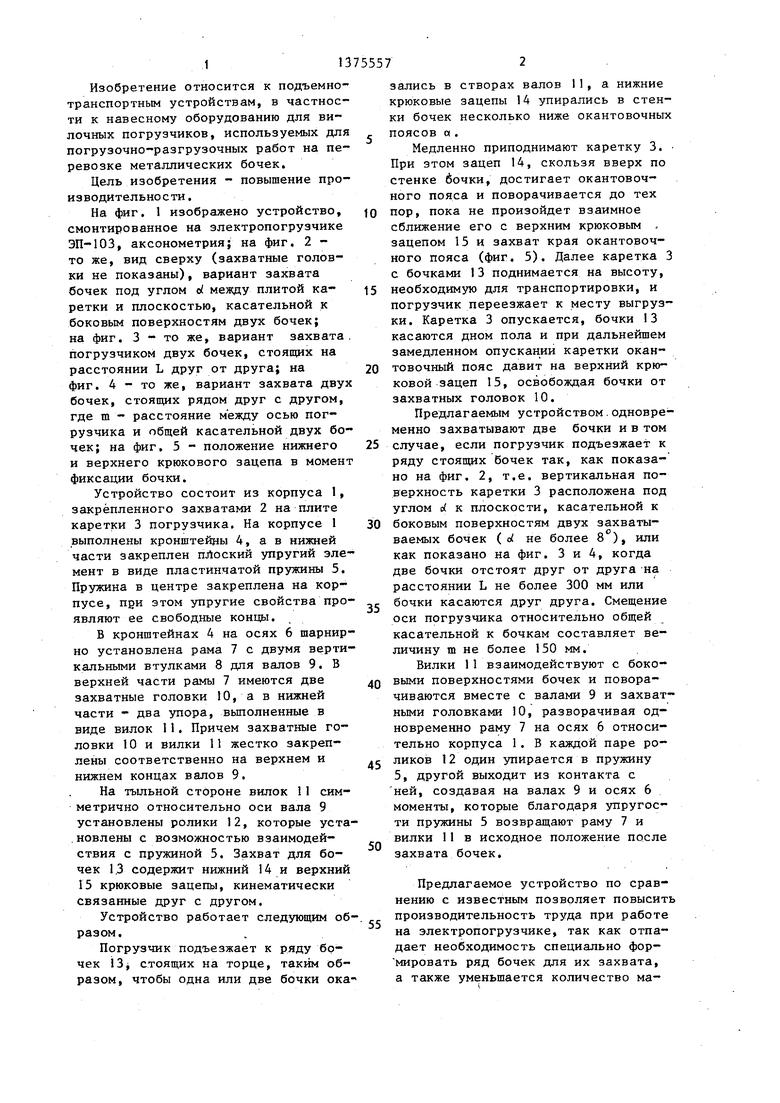
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для бочек с уторами | 1986 |
|
SU1386547A1 |
| Захват для бочек к погрузчику | 1987 |
|
SU1458311A1 |
| Захват погрузчика | 1974 |
|
SU562504A1 |
| Ручная тележка | 1984 |
|
SU1227542A1 |
| Захват для бочек к погрузчику | 1983 |
|
SU1105456A1 |
| Захват для бочек к погрузчику | 1988 |
|
SU1576481A1 |
| ВИБРАЦИОННЫЙ ВИЛОЧНЫЙ ЗАХВАТ К ПОГРУЗЧИКУ | 1969 |
|
SU236312A1 |
| Захват-кантователь для бочек к электропогрузчику | 1984 |
|
SU1221207A2 |
| Ручная тележка для перевозки и кантования бочки | 1987 |
|
SU1449441A2 |
| Захват для деревянных бочек к погрузчику | 1988 |
|
SU1548155A1 |

Изобретение относится к подъемно-транспортным устройствам, в частности к навесному оборудованию для вилочных погрузчиков, и используется для выполнения погрузочно-раз- а. грузочных работ с металлическими бочками. Цель изобретения - повышение производительности. Устройство для захвата двух бочек содержит кор пус 1, агакреплен ный на каретке 3 погрузчика, на котором смонтирована рама 7 с двумя вертикальными втулками 8 для валов 9. В верхней части рамы 7 имеются захватные головки 10, а в нижней части установлены упоры для бочек в виде вилок 11. Вилки 11 упираются в захватываемую бочку с плавающим эффектом за счет того, что снабжены с тыльной стороны роликами 12, которые опираются на плоский упругий элемент в виде пружины 5. 5 ил. а & (Л со « СП сд 01 м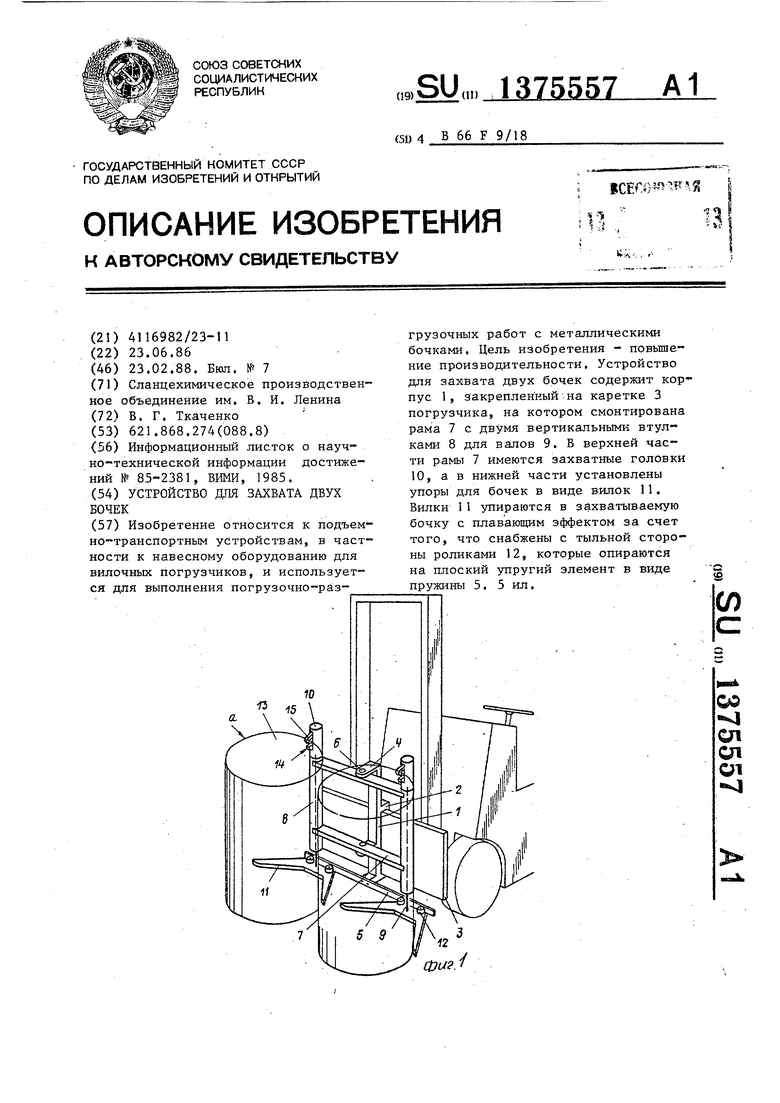
/5
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
