1
Изобретение относится к машиностроению, а именно к мянштупяторам для работы в зонах радиоактивного излучения под водой,в космосе и т.д.
По основному авт.св. № 476971 известей исполнительный орган манипулято с шаршгрно соединенными неподвижной и подвижной опорами, плечом,предплечьем, кистью, сменным инстругугентом и распо ложенными непосредственно на них приводами поворота этих звеньев.
Цель изобретения - повышение маневренности и сокращение габаритов.
Это достигается тем, что привод ро- тадии кисти смонтирован в предплечья соосно приводу ее качания и кинематически свягЗан с приводом инструмента, например, системой трех конических шестерен с общим передаточным, отношением равным единице.
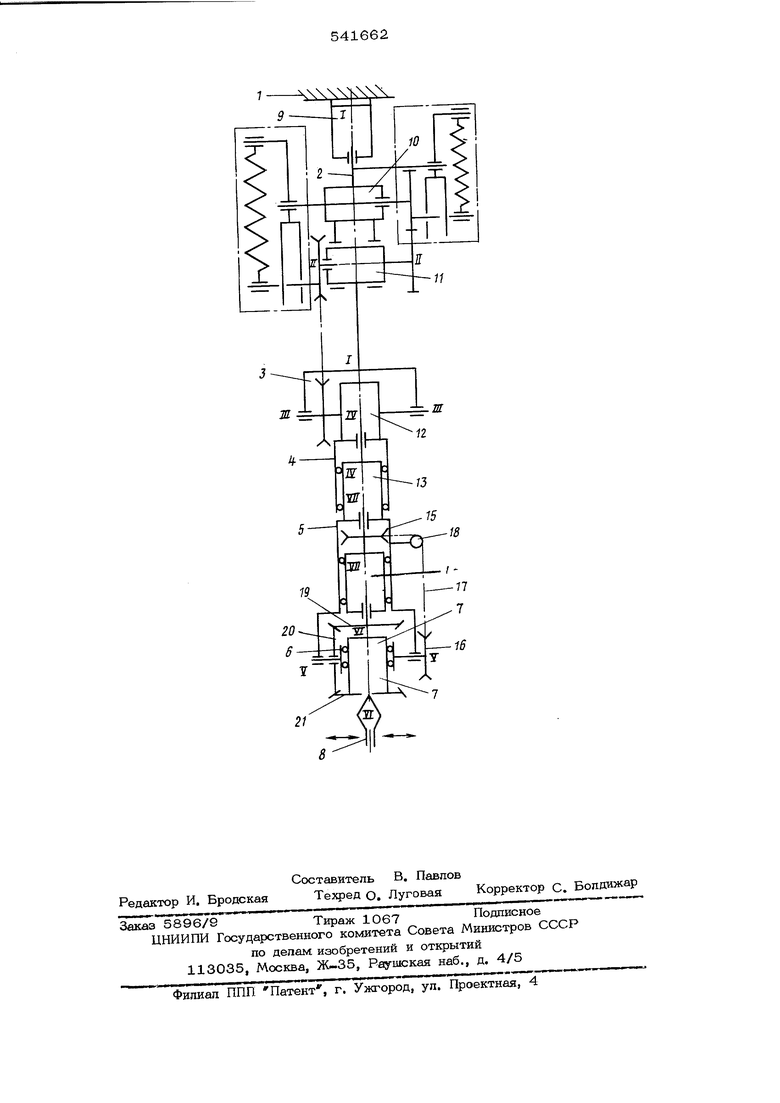
На чертеже показана кинематическая схема описываемого механизма в исходном положении, при этом, все шарнирные оси находятся в плоскости чертежа,
Предложе1шый исполнительный орган манипулятора состоит из неподвижной опоры 1, к которой с еозмо ;а1остью поворота относительно оси1-1 прикреплена подвижная опора 2. Плечо 3 подвешено к подвижной опоре 2. так, что может поворачиваться относительно оси 11-П . К плечу 3 подвешено двухзвенное предплеч 4 и 5. Звено 4 предплечья обеспечивает его поворот относительно оси 111-111, а звено 5 предплечья - поворот кисти 6 относительно оси IV-IV. К звену 5 предплечья с возможностью поворота относительно ocHV-V подвешена кисть 6.
На кисти 6 с возможностью поворота относительно оси VI-V установлен привод 7 сменного инструмента, осуществляющий рабочие движения .захватывающих элементов сменного инструмента 8.
Прямоугольниками 9-14 обозначены расположенные непосредственно на элементах конструкции приводы, перемещающие эти элементы относительно указанны осей. Каждый привод представляет собой совокупность двигателя с тормозом, ре-
дуктора и датчиков обратных связей. При отсутствии управляющего сигнала на приводе выходной вал последнего .заторможен.
В предложенном исполнительном органе в верхней части звена 5 закреплен привод 13 качания кисти, на выходном валу которого укреплен ведущий блок 15 механизма качания кисти. Кроме того, на выходном валу привода качания кисти укреплен корпус привода 14 ротации инструмента. Нижняя часть звена выполнена в виде вилки с гнездами для подшипников, причем ось гнезд пересекает ось IV- IV под прямым углом.
Кисть б выполнена в виде корпусной детали с папфами. На правой удлиненной цапфе укреплен ведомый блок 16 механизма поворота кисти, связанный с ведущим, блоком. 15 тросом 1 через промежуточный блок 18. В кисти 6 установлен привод 7 инструмента с возмоншостью поворота в подишпниках относительно оси IV-IV пересекающей осью V V под прямым углом.
Движение ротации корпуса привода 7 с привода 14 передается черее систему трех конических шестерен 19, 20, 21, установленных так, что их оси взаимно перпендикулярны и пересекаются в одной точке. Общее передаточное отношение 1:1. Шестерня 19 укреплена на выходном валу привода 14. Шестерня 20 установлена на левой цапфе корпусfi кисти 6 и может свободно ней вращаться, а щестерня 21 - на корпусе привода 7 схвата.
7 сменного инструмента снабжен выходным, элементом, обеспечивающим его стыковку с унифицированным инсарументом.
Исполнительный орган манипулятора работает следующим образом.
Движения элементов исполнительного органа происходят при подаче на соответствующие приводы управляю01их сигналов. При отсутствии управляющего сигнала привод работает как жесткий конструкционный
элемент, поскольку снабжен тормозом, который выключается только при подаче управляющего сигнала.
Подача управляющего сигнала на привод
13 приводит к повороту кисти 6 относительно оси V-V через систему трех блоков 15, 16, 18 с передаточным отношением 1:1 с помощью троса 17.
Одновременно с этим происходит пово-
рот корпуса привода 14 и его вала (при отсутствии управляющего сигнала на приводе 14) вместе с шестерней 19. При этом поворачивается шестерня 20, находящаяся в зацеплении с шестерней 19.
Благодаря тому, что передаточное отношение передач равно 1:1, шестерня 20 поворачивается на тот же угол, что и кисть 6 вместе с приводом. 7 относительно оси V-V.
Таким образом.в зацеплении шестерен .20 и 21 движение обкатки отсутствует, что исключает поворот корпуса привода 7 относительно оси VI VI при отсутствии управляющего сигнала на приводе 14.
При подаче управляющего сигнала на привод 14 вращается шестерня 19 и сидяшая свободно на дапфе шестерня 20, которая через шестерню 21 приводит к повороту корпус привода 7 относительно осиУ-У.
Формула изобретения
1. Исполнительный орган манипулятора по авт. св. № 476971, отличающийся тем, что, с целью повышения маневренности и сокращения габаритов,
привод ротации кисти смонтирован в предплечьи соосно приводу ее качания и кинематически связан с приводом инструменTas например, системой конических шестерен.
2. Исполнительный орган по п. 1, о тличающийся тем, что передаточное отношение системы конических шестерен равно единице.

| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1975 |
|
SU560746A2 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Манипулятор | 1979 |
|
SU871991A1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| Исполнительный орган манипулятора | 1973 |
|
SU476971A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1123227A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |