(5t) СИСТЕМА УПРАВЛЕНИЯ НАГРУЖЕНИЕМ
1
Изобретение относится к автоматике и может быть использовано в мно гоканальных установках для ресурных испытаний различных конструкций, например планера-самолета, а также в других установках для формирования управляющего сигнала и контроля за его воспроизведением.
Известна цифровая система управления испытательной установкой, содержащая цифровое вычислительное устройство, цифро-аналоговые преобразователи, вибраторы, механически связанные с объектом испытаний, датчики обратной связи и,аналого-цифровые преобразователи ПЗ.
Недостатком известной системы является сложность при большом количестве каналов управления.
Наиболее близким к изобретению по технической сущности является система управления нагружением конструкций, содержащая первую групИу электрогидравлических следящих при КОНСТРУКЦИЙ
ВОДОВ, входы каждого из которых через соответствующие цифро-аналоговые преобразователи и устройство ввода-вывода соединены с выходом блока задания и контроля программы, вторую группу электрогидравлических следящих приводов, блок управ- ления, первые вход и выход которого подключены соответственно к второму выходу устройства ввода-вывода и
to управляющему входу источника гидропитания, связанного ч«рез каналы нагнетания и слива с электрогидравлическими следящими приводами, и последовательно соединенных мульти15плексор и аналого-цифровой преобразователь, выход которого через устройство ввода-вывода подключен к входу блока задания и контроля npoi- раммы 2
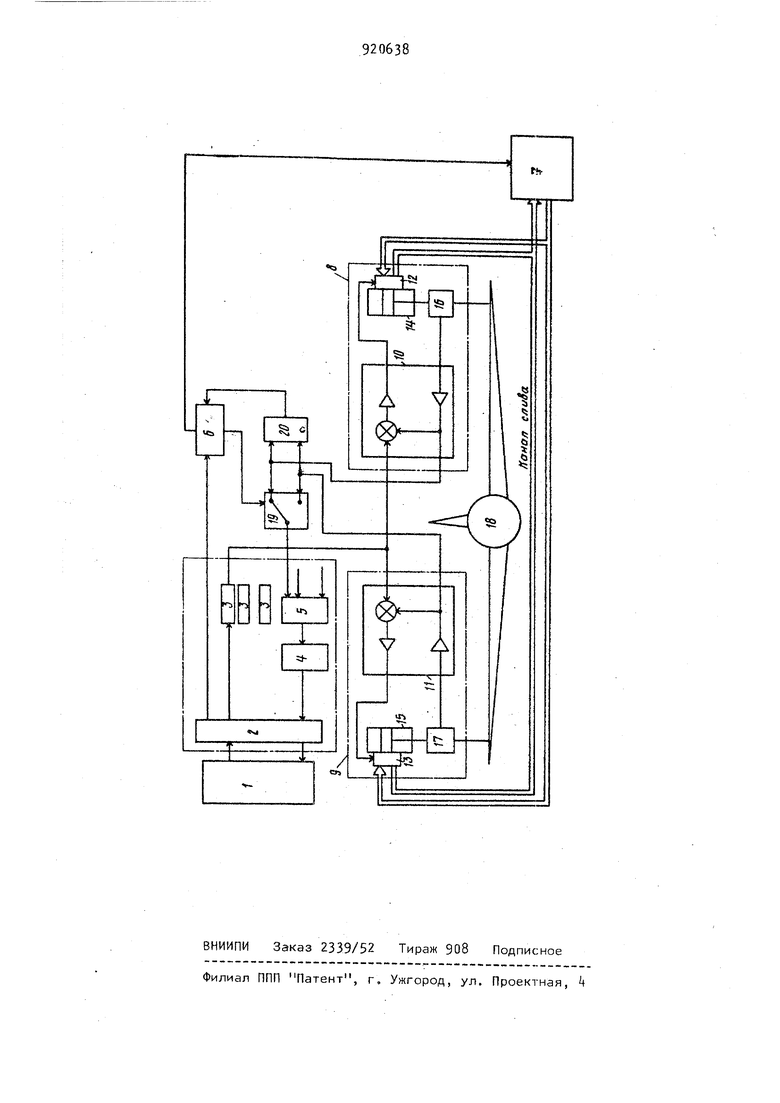
Недостатком известной системы является сложность и, следовательно, высокая стоимость при большом 39 количестве точек нагружения конструкций. Цель изобретения - упрощение сис темы. Указанная цель достигается тем, что в систему введены коммутаторы и блоки сравнения по числу электрогидравлических следящих приводов в первой группе, первые и вторые входы которых соединены соответственно с выходами электрогидравличес ких следящих приводов первой группы и с выходами электрогидравлических следяи1их приводое второй группы, входы которых подключены к входам.COOTветствующих электрогидравли ческих следящих приводов первой группы, выход каждого из блоков сравнения соединен с вторым входом блока,управления, выход каждого коммутатора - с соответствующим вхо дом мультиплексора, третий вход каждого коммутатора подключен к вто рому выходу блока управления. На чертеже приведена блок-схема системы. Система содержит блок 1 задания и контроля программы, устройство 2 ввода-вывода, цифро-аналоговые преобразователи 3, аналого-цифровой преобразователь k, мультиплексор 5 блок 6 управления, источник 7 гидро питания, электрогидравлические следящие приводы первой и второй групп 8 и 9 состоящие из регуляторов 10 и 11, сервоклапанов 12 и 13, гидроцилиндров 1 и 15, датчиков 16 и 1 обратной связи, а также конструкцию 18 нагружения, коммутатор 19 и блок 20 сравнения. Система работает следующим образом. Блок 1 задания и контроля npoi- раммы, функции которого могут быть реализованы электронной вычислитель ной машиной, формирует программный сигнал, поступающий через устройств ввода-вывода и цифро-аналоговый преобразователь на входы электрогидравлических следящих приводов 8 и 9 воспроизводящих одинаковые программы нагружения. Гидроцилиндры 1 и 15 воспроизводят входной сигнал в виде нагрузок, действующих на испытываемую конструкцию 18. В зависимости от положения коммутато ра 19 с входом мультиплексора 5 свя зан выход только одного электрогидравлического следящего привода 8 или 9- При этом аналоговый сигнал обратной связи с датчика 16 или 17 через коммутатор 19 и мультиплексор 5 поступает на аналого-цифровой преобразователь, где преобразуется в цифровой сигнал и далее через устройство ввода-вывода 2 поступает в блок задания и контроля программы 1. Таким образом осуществляется контроль работы одного из двух следящих приводов 8 или 9- Нагрузки, воспроизводимые другим приводом, контролируются путем сравнения сигналов датчиков обратной связи 16 или 17 между собой в блоке сравнения 20. Если разница между этими сигналами превысит допустимую величину, на выходе блока сравнения 20 появляется сигнал, поступающий на блок управления 6, с которого выдается команда на отключение источника гидропитания 7, и испытываемая конструкция разгружается. Переключением коммутатора 19 меняется электрогидравлический следящий привод, выходной сигнал которого контролируется в блоке 1. Команды на переключение коммутатора 19 формируются блоком управления 6.В случае реализации данной системы на базе управляющей ЭВМ при ограниченном числе каналов интерфейса, куда .входят устройство вводавь(вода, цифро-аналоговые преобразователи, мультиплексор и аналого-цифровой преобразователь, возможно управление значительно большим числом электрогидравлических следящих приводов, что снижает стоимость испытательного оборудования в целом и, следовательно, дает определенный технико-экономический эффект. Формула изобретения Система управления нагружением конструкций, содержащая первую группу злектрогидравлических следящих приводов, входы каждого из которых через соответствующие цифроаналоговые преобразователи и устройство ввода-вывода соединены с выходом блока задания и контроля программы, вторую группу электрогидравлических следящих приводов, блок управления, первые вход и выход которого подключены соответственно к второму выходу устройства ввода-вывода и управляющему входу источника гидропитания, свйзанного через каналы нагнетания и слива с электро гидравлическими следящими приводами и пocлeдoвaYeльнo соединенные мультиплексор и .аналого-цифровой преоб разователь., выход которого через устройство ввода-вывода подключен к входу блока задания и контроля программы, отличающаяся тем, что, с целью упрощения системы, в нее введены коммутаторы и блоки сравнения по числу электрогидравлических следящих приводов в первой группе, первые и вторые входы которых соединены соответственно с выходами электрогидравлических следящих приводов первой группы и с выходами электрогидравлических сле86дящих приводов второй группы, входы которых подключены к входам соответствующих электрогидравлических следящих приводов первой группы, каждого из блоков сравнения соец динен со вторым входом блока управления, выход каждого коммутатора с соответствующим входом мультиплексора, а третий вход каждого коммутатора подключен ко второму выходу блока управления. Источники информации, принятые во внимание при экспертизе 1,Гетмайов А.Г. и др. Автоматическое управление вибрационными испытаниями. -М. , Энергия, 1978, с. 78. 2.Control Sub-System Functional, MTS System Corporation, CIJA (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система управления блочно-модульного построения нагружателем гидравлическим в стендах прочностных испытаний | 2016 |
|
RU2643198C1 |
| Электрогидравлическая следящая система стенда | 1985 |
|
SU1272820A1 |
| Устройство для воспроизведения функций | 1985 |
|
SU1273955A1 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ БУКСОВОГО УЗЛА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2391656C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ НЕИСПРАВНОСТИ ПРИБОРОВ | 1994 |
|
RU2087409C1 |
| Функциональный генератор | 1985 |
|
SU1262533A1 |
| Диагностируемый электрогидравлический силовой следящий привод | 1987 |
|
SU1539729A1 |
| Многоканальная цифровая система управления виброиспытательной установкой | 1978 |
|
SU943642A1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА НАГРУЖЕНИЯ | 2005 |
|
RU2303804C2 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |