Изобретение относится к пищевой промышленности, а именно, к устройствам для ориентации изделий в упаковочных машинах.
Известно устройство для ориентации флаконов к упаковочным машинг1М, содержащее пару сдвоенных турникетных звездочек с фигурными выемками по окружности, имеющих привод, и транспортер для флаконов 11 .
в известном устройстве при принудительном приводе турникетньпс звездочек., возможны повреждения флаконов при заходе в гнезда,осоеемно . сказывающиеся при подаче мягких полимерных флаконов,что в конечном итоге может привести к заклиниванию и повреждению устройства.
Цель изобретения - исключение повреждения подаваемых флаконов.
Поставленная цель достигается тем, что в устройстве для ориентации флаконов к упаковочным машинам,содвржсццем пару сдвоенных турникетных звездочек с фигурньми выемками по окружности, имеющих привод, и транспортер для флаконов,привод звездочек состоит из двух храповых механизмов, .собачки которых связаны посредством |общей тяги, а храповые колеса установлены на осях звездочек, при этом одна из собачек посредством рычажного механизма связана с приводным толкателем.
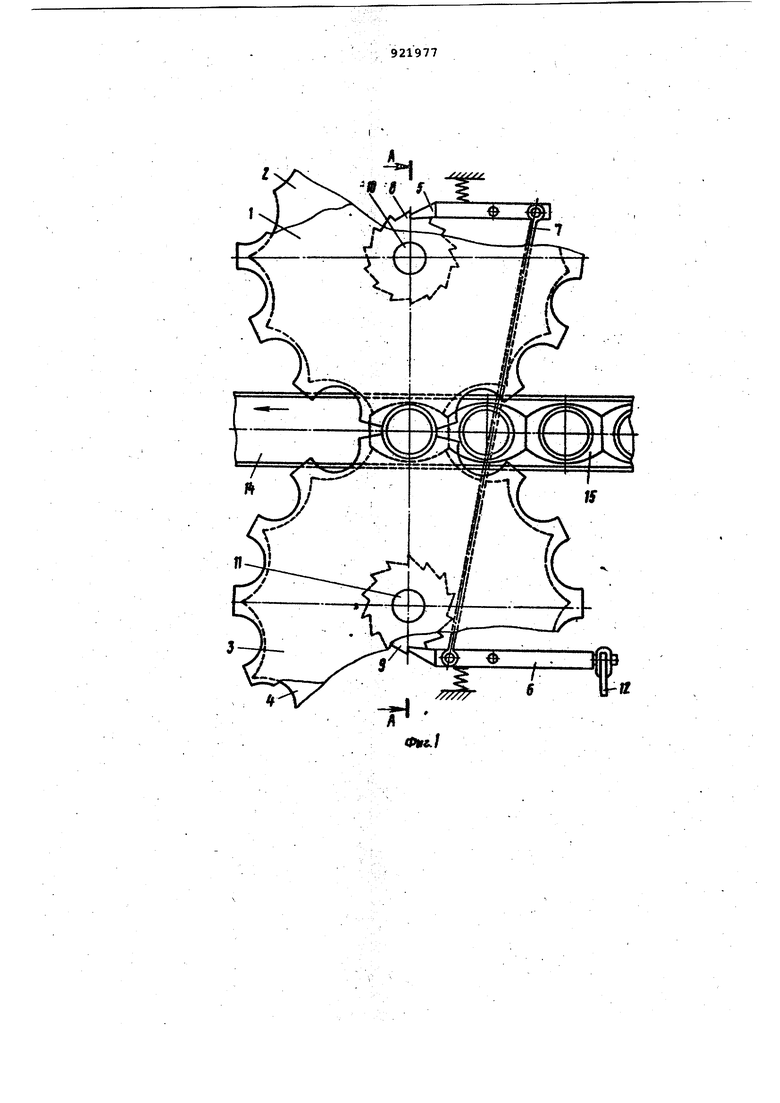
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг.2 сечение А-А на фиг.1.
Устройство содержит пару сдвоенных турникетных звездочек 1- 4 с фиtoгурными выемками по окружности , имеющих привод, состоящий из двух храповых механизмов, собачки 5 и 6 которых связаны посредством общей тяги 7, а храповые колеса 8 и 9 fустановлены
t5 на осях 10 и II звеэдо.чек 1 - 4, при этом собачка посредством рачажного механизма 12 связана с приводным толкателем 13, а также тра{1спрртер 14 для флаконов 15,
20
: Устройство работает следующим образом.
Флаконы 15 перемещаются по транспортеру 14 создавая определенный
25 напор. Горловины флаконов 15, воздействуя на сегментные заглубления турникетных звездочек 1 и 3, стремятся провернуть последниег которые будут удерживаться от поворота храповыми
30 колесак и 8 и 9, в которые упираются собачки 5 и 6. По команде от толкате.ля 13 рычажный механизм 12 своей клиновой частью воздействует на собачку 6. Последняя выходит из зацеп ления с зубсил храпового колеса 9 и, посредствен тяги 7, выводит из заце ления с зубом храпового колеса 8 собачку 5. Время нажатия толкателя 13 на рычажный механизм 12 меньше, чем время, потребное для поворота храпового .колеса на один зуб. Флако 15 под напором, оказываемым последукяадвии флаконг1ми, проворачивает турникетные звездочки 1 -4 с храповьми колесами 8 и 9 и перемещается в перед для очередной операции укупорки. Так как на ролик 16 рычажный механизм 12 в это ьвремя влияния не оказывает, подйружиненная собачка б стремится-войти в зацепление с зубом храпового колеса 9, и, соответственно, собачка 5 стремится войти в зацепление с зубом храпового колеса 8. После поступления флакона в рабочую зону, турникетные звездочки 1-4 останавливаются, так как в зубья храповых колес 8 и 9 упираются собачки 5 и б. В рабочей зоне при помощи звездочек 1 и 3 происходит ориентация горловины флакона относит льно исполнительного органа упаковоч ной машины, и, при помощи звёздочек 2 и 4 происходит ориентирование и фиксация флакона, предотвращаю1дая его проворот вокругсобственной верти кальной оси. После окончания операции в рабочей зоне от исполнительно го органа упаковочной машины поступает сигнал на толкатель 13, который посредством рычажного механизм 12 воздействует на собачки 5 и 6, последние выходят из зацепления с зубьями храповых колес 8 и 9, и цикл повторяется . Таким образом, предлагаемое выполнение привода турникетных звездочек от подпора самих зке флаконов, позволяет значительно упростить.конструкцию устройства и исключить при этом повреждения флаконов, позволяет повысить эффективность и надежность укупорочного оборудования. Формула изобретения Устройство для ориентации флаконов к упаковочньм машинам, содержащее пару сдвоенных турникетных звездочек с фигурньми выемками по окружности, имеющих привод, и транспортер для флаконов, отличающееся тем, что,, с целЁю исключения повреждения подаваемых флаконов, привод звездочек состоит из двух храповых механизмов, собачки которых связаны посредством общей тяги, а храповые колеса установлены на осях звездочек, при этсм одна из собачек посредством рычажного механизма связана с приводным толкателем. Источники информации, принятые во взимание при экспертизе 1.Степанов И.А.,Галасов П.Н. Поточные линии розлива и укупорки пищевых жидкостей.м., Пищевая промышленность, 1965, с.134.
| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегат для штемпелевки и упаковки стирательных резинок | 1953 |
|
SU119472A2 |
| Устройство для погрузки на полочные вагонетки камерных сушил пустотелых керамических блоков | 1951 |
|
SU95524A1 |
| Механизм привода питателя кормов | 1987 |
|
SU1475563A1 |
| Устройство для выгрузки кормов из башен | 1984 |
|
SU1192716A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ СО СДВОЕННОЙ ХРАПОВОЙ ПЕРЕДАЧЕЙ | 2013 |
|
RU2510614C1 |
| ВЕЛОСИПЕД И РЫЧАЖНО-ХРАПОВОЙ МЕХАНИЗМ | 1999 |
|
RU2155141C1 |
| Устройство для взвешивания, укупорки и маркировки бочек | 1953 |
|
SU99700A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ КРУГЛОЧУЛОЧНЫМ АВТОМАТОЛ\ | 1971 |
|
SU293075A1 |
| МАШИНА ДЛЯ УБОРКИ КОРНЕЙ РАСТЕНИЙ | 2007 |
|
RU2332829C1 |