Фиг.1
Изобретение относится к сельскохозяйственному машиностроению, в частности к механизмам привода питателей кормов.
Цель изобретения - упрощение регулирования скорости транспортера питателя при одновременном повышении равномерности его перемещения и надежности механизма в работе.
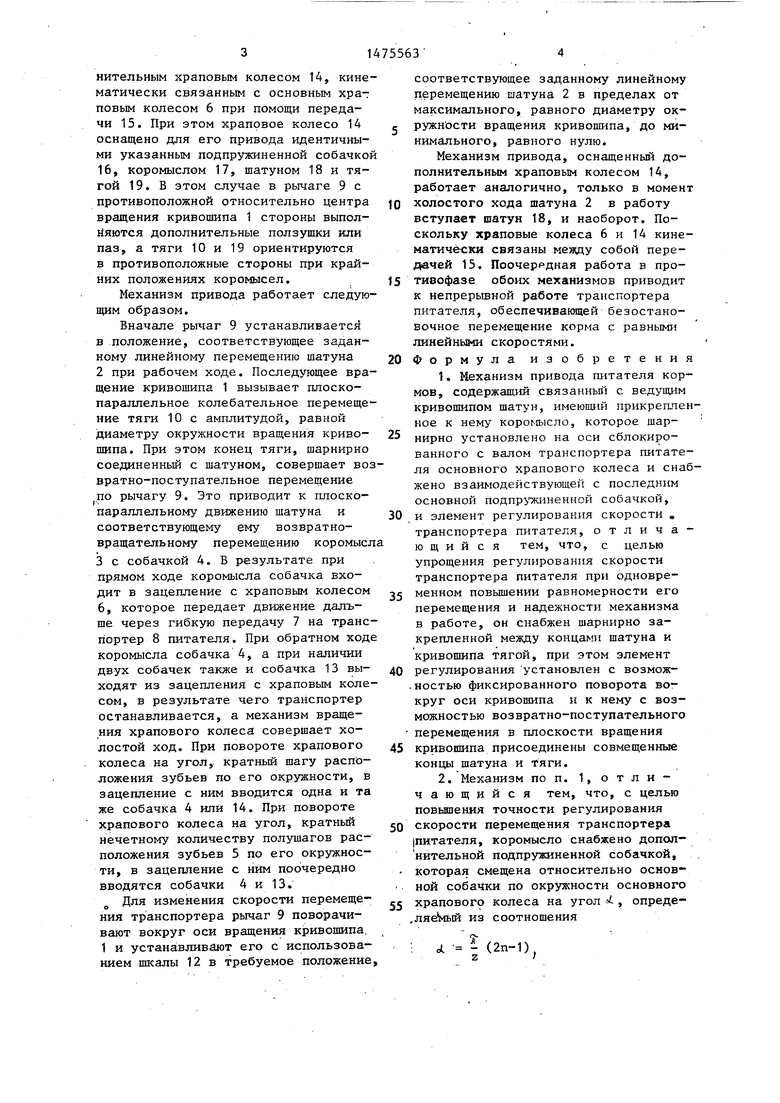
На фиг.1 схематично изображен механизм привода питателя кормов, общий вид, на фиг.2 - элемент регулирования скорости перемещения транпортера при максимальном ходе шатуна вид сбоку; на фиг.З - то же, при минимальном ходе шатуна; на фиг.4 - коромысло, оснащенное двумя собачками, вид сбоку на фиг.5 - схема взаимодействия основной и дополнительной собачек с основным храповым колесом, на фиг.6 - механизм привода с дополнительным храповым колесом, общий вид, вариант.
Механизм привода содержит связанный с ведущим кривошипом 1 шатун 2, имеющий прикрепленное к нему коромысло 3, которое снабжено основно подпружиненной собачкой 4, взаимодействующей с зубьями 5 храпового колеса 6. Коромысло шарнирно установлено на оси храпового колеса,которое посредством, например, гибкой передачи 7 связано с валом транспортера 8 питателя кормов. Механизм привода оснащен элементом регулирования скорости транспортера, выполненным в виде, например, рычага 9, установленного с возможностью фиксированного поворота вокруг оси кривошипа.
Между концами шатуна и кривошипа шарнирно закреплена тяга 10, причем к рычагу 9 с возможностью возвратно поступательного перемещения в плоскости вращения кривошипа присоединены посредством ползушки или паза 11 совмещенные концы шатуна и тяги. Для упрощения эксплуатации рычаг 9 снабжен оттарированной шкалой 12, позволяющей точно установить рычаг в положение, соответствующее заданному рабочему коду 1 шатуна.
С целью повышения точности регулирования скорости транспортера коромысло может быть выполнено с дополнительной подпружиненной собачкой, 13, смещенной относительно основной собачки 4 по окружности
храпового колеса 6 на угол vi , определяемый из соотношения:
«. - (2п - 1), z
где z - число зубьев храпового колеса, п - целое число в интервале от
0 1 До z.
При этом в исходном положении собачка 4 взаимодействует своим рабочим концом с первой по ходу вращения храпового колеса рабочей гранью зуба 5, а собачка 13 размещается над его нерабочей гранью. Особенностью взаимодействия двух собачек с храповым колесом является то, что при повороте последнего собачкой 4 на
0 угол, кратный полушагу расположения зубьев 5, например на 1,5, 2,5, 3,5 шага, при возвращении коромысла 3 после рабочего хода в исходное положение эта собачка уже не может
5 войти в зацепление с очередным зубом храпового колеса, так как в этом случае она располагается над второй по ходу вращения храпового колеса (не рабочей) гранью зуба, т.е. со0 бачка 4 за каждый рабочий ход коромысла смещается относительно рабочей грани зуба на ширину последнего, соответствующую половине шага расположения зубьев. Поэтому при пово5 роте храпового колеса собачкой 4 за один ход коромысла последующий его поворот на тот же угол возможен, если при возвращении коромысла и собачки в исходное положение в за0 цепление с зубом 5 войдет собачка 13. Это условие выполняется при смещении собачки 13 в исходном положении по отношению к соответствующему исходному положению собачки 4
5 по окружности храпового колеса на нечетное количество полушагов зубьев. Угловое смещение tr (фиг.5), соответствующее шагу зубьев, сос2jTтавляет fr -, а полушагу зубьев 0 5Г Z
-, следовательно, угол о взаимного смешения собачек 4 и 13 соответствует нечетному количеству (2п-1) полушагов зубьев, чем обусловлено
5 установление указанного соотношения между «( , z и п.
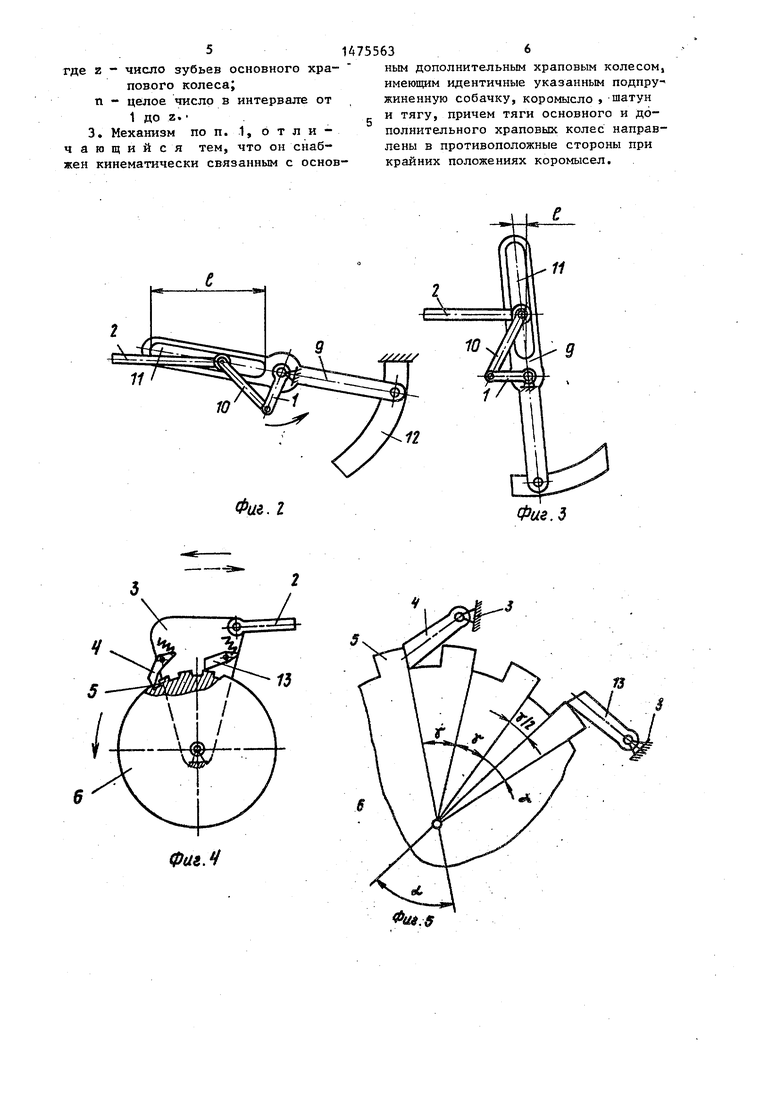
Для полного исключения холостого хода механизм привода снабжен допол
нительным храповым колесом 14, кинематически связанным с основным храповым колесом 6 при помощи передачи 15. При этом храповое колесо 14 оснащено для его привода идентичными указанным подпружиненной собачкой 16, коромыслом 17, шатуном 18 и тягой 19. В этом случае в рычаге 9 с противоположной относительно центра вращения кривошипа 1 стороны выполняются дополнительные ползушки или паз, а тяги 10 и 19 ориентируются в противоположные стороны при крайних положениях коромысел.
Механизм привода работает следующим образом.
Вначале рычаг 9 устанавливается в положение, соответствующее заданному линейному перемещению шатуна
2при рабочем ходе. Последующее вращение кривошипа 1 вызывает плоскопараллельное колебательное перемещение тяги 10 с амплитудой, равной диаметру окружности вращения криво- шипа. При этом конец тяги, шарнирно соединенный с шатуном, совершает возвратно-поступательное перемещение
fno рычагу 9. Это приводит к плоско- параллельному движению шатуна и соответствующему ему возвратно- вращательному перемещению коромысл
3с собачкой 4. В результате при прямом ходе коромысла собачка входит в зацепление с храповым колесом 6, которое передает движение дальше через гибкую передачу 7 на транспортер 8 питателя. При обратном ходе коромысла собачка 4, а при наличии двух собачек также и собачка 13 вы- ходят из зацепления с храповым колесом, в результате чего транспортер останавливается, а механизм вращения храпового колеса совершает холостой ход. При повороте храпового колеса на угол, кратный шагу расположения зубьев по его окружности, в зацепление с ним вводится одна и та
же собачка 4 или 14. При повороте храпового колеса на угол, кратный нечетному количеству полушагов расположения зубьев 5 по его окружности, в зацепление с ним поочередно вводятся собачки 4 и 13.
Для изменения скорости перемеще- ния транспортера рычаг 9 поворачивают вокруг оси вращения кривошипа 1 и устанавливают его с использованием шкалы 12 в требуемое положение,
соответствующее заданному линейному перемещению шатуна 2 в пределах от максимального, равного диаметру окружности вращения кривошипа, до минимального, равного нулю.
Механизм привода, оснащенный дополнительным храповым колесом 14, работает аналогично, только в момен холостого хода шатуна 2 в работу вступает шатун 18, и наоборот. Поскольку храповые колеса 6 и 14 кинематически связаны между собой передачей 15. Поочеррдная работа в про- тивофазе обоих механизмов приводит к непрерывной работе транспортера питателя, обеспечивающей безостановочное перемещение корма с равными линейными скоростями. Формула изобретени
1.Механизм привода питателя кормов, содержащий связанный с ведущим кривошипом шатун, имеющий прикрепленое к нему коромысло, которое шарнирно установлено на оси сблокированного с валом транспортера питателя основного храпового колеса и снажено взаимодействующей с последним основной подпружиненной собачкой,
и элемент регулирования скорости . транспортера питателя, отличающийся тем, что, с целью упрощения регулирования скорости транспортера питателя при одновременном повышении равномерности его перемещения и надежности механизма в работе, он снабжен шарнирно закрепленной между концами шатуна и кривошипа тягой, при этом элемент регулирования установлен с возможностью фиксированного поворота вокруг оси кривошипа и к нему с возможностью возвратно-поступательного перемещения в плоскости вращения кривошипа присоединены совмещенные концы шатуна и тяги.
2.Механизм по п. 1, отличающийся тем, что, с целью повышения точности регулирования скорости перемещения транспортера |питателя, коромысло снабжено допол- нительной подпружиненной собачкой, которая смещена относительно основной собачки по окружности основного храпового колеса на угол 4, опреде-
.ляе мый из соотношения
А - (2п-1) z )
где z - число зубьев основного храпового колеса; тг - целое число в интервале от
1 до z.
3. Механизм по п. 1, отличающийся тем, что он снабжен кинематически связанным с основным дополнительным храповым колесом, имеющим идентичные указанным подпруч жиненную собачку, коромысло шатун и тягу, причем тяги основного и дополнительного храповых колес направлены в противоположные стороны при крайних положениях коромысел.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм привода реверсивного транспортера кормораздатчика | 1987 |
|
SU1493204A1 |
| Устройство для привода продольного транспортера кормораздатчика | 1988 |
|
SU1576083A1 |
| Устройство для привода питателя кормораздатчика | 1988 |
|
SU1542496A1 |
| Устройство для привода транспортеров | 1987 |
|
SU1461392A1 |
| Устройство для привода транспортеров питателей-дозаторов | 1989 |
|
SU1655405A1 |
| Устройство для привода продольных транспортеров питателей-дозаторов | 1982 |
|
SU1085576A1 |
| Питатель-дозатор кормов | 1987 |
|
SU1426516A1 |
| Питатель раздатчика стебельчатых кормов | 1988 |
|
SU1551303A1 |
| Устройство для привода транспортеров питателей-дозаторов | 1986 |
|
SU1367928A1 |
| Питатель раздатчика стебельчатых кормов | 1981 |
|
SU1005740A1 |
Изобретение относится к сельскохозяйственному машиностроению и обеспечивает упрощение регулирования скорости транспортера питателя при одновременном повышении равномерности его перемещения и надежности механизма в работе. Механизм привода содержит ведущий кривошип 1, который посредством тяги 10 и шатуна 2 шарнирно связан с коромыслом 3 и приводит в движение через собачку 4 храповое колесо 6 и далее через гибкую передачу 7 транспортер 8 питателя кормов. Совмещенные концы тяги и шатуна установлены на рычаге 9 с возможностью перемещения вдоль него. Рычаг 9 является элементом регулирования скорости транспортера 8 и перед началом работы механизма устанавливается поворотом вокруг оси кривошипа в положение, соответствующее заданному линейному перемещению шатуна при рабочем ходе. 2 з.п. ф-лы, 6 ил.
Фиг. г
Фиг.1
Фие.З
Фи.$
Составитель А.Нефедов Редактор Л.Пчолинская Техред Л.Олийнык Корректор Л.Патай
Заказ 2091/4
Тираж 471
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина,101
16
17
Фиг. 6
Подписное
| Устройство для привода продольных транспортеров питателей-дозаторов | 1982 |
|
SU1085576A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Питатель раздатчика стебельчатых кормов | 1981 |
|
SU1005740A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
