1
Изобретение относится к грузоаахват.к ным устройствам.
Известно грузозахватное устройство, содержащее корпус, шарнирно установленные в нем захватные рычаги и привод для управления захватными рычагами, включающий силовой цилиндр и копир для заимодействия с рычагами ll .
Однако это устройство не обеспечивает поворот захватных рычагов и груза вокипг вертикальной оси.
Наиболее близким к изобретению по
технической сущности является захватное
устройство для грузов с фигуряой головкой, содержащее корпус, шарнирно установленные в корпусе захватные рычаги, привод для управления захватными рычагами и механизм поворота захватных рычагов вокруг вертикальной оси, включающий в себя двигатель 2 .
Недостатком этого устройства является наличие двух самостоятельных приводов для управления захватными рычагаг ми и поворота их вокруг вертикальной
оси, что увеличивает габариты устройства и делает невозможным его использование в стесненных условиях.
Целью изобретения является расширение эксплуатационных возможностей уст ройства путем уменьшения его габаритов,
Поставленн1ая цель достигается чтем, что аао снабжено закрепленным в корпусе с возможностью поступателглгого дви10жения валом, на котором жестко закреплен копир для взаимодействия с захварными рычагами в выполнена кольцевая выточка, закрепленной на валу посредством резьбового соединения обоймой
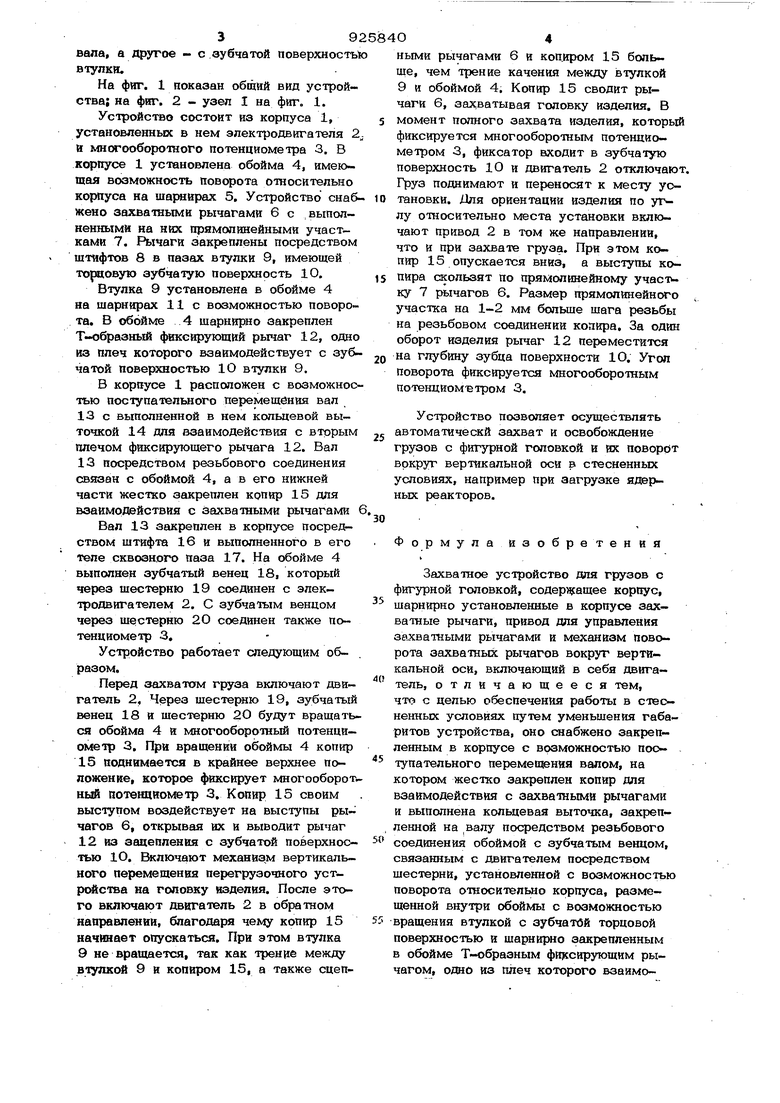
1а с зубчатым венцом, связанным с двигателем через шестерню, установленную с возможностью поворота отеосвтельно корпуса, размещенной внут обоймы с возможностью псюорота втулкой с зубгочатые тoplI6вoй поверхнос ю и шарнирно закрепленным в обойме Т-образным фик- сируЪщнм рычагом, одно из плеч которого взаимодействует с кольцевой выточкой вала, а другое - с зубчатой noeepXHocTb втупки. На фиг. 1 показан общий вид устройства; на фиг. 2 - узел I на фиг. 1. Устройство состоит из корпуса 1, установленных в нем электродвигателя 2 а многооборотного потенциометра 3. В корпусе 1 установлена обойма 4, имеющая возможность Поворота относительно кортуса на шарнирах 5. Устройство снаб жено захватными рычагами б с .выполненными на них прямолинейными участками 7. Рычаги закреплены посредством штифтов 8 в пазах втулки 9, имеющей TofraoBy зубчатую поверхность Ю. Втулка 9 установлена в обойме 4 на шарнирах 11с возможностью поворота, В обойме 4 шарнирно закреплен Т-образный фиксирующий рычаг 12, одно из плеч которого взаимодействует с зуб чатой поверхностью Ю втулки 9. В корпусе 1 расположен с возможнос тью поступательного перемещения вал 13 с выполненной в нем кольцевой выточкой 14 для взаимодействия с вторым плечом фиксирующего рычага 12. Вал 13 посредством резьбового соединения связан с обоймой 4, а в его нижней части жестко закреплен копир 15 для взаимодействия с захватными рычагами Вал 13 закреплен в корпусе посредством штифта 16 и выполненного в его теле сквозного паза 17. На обойме 4 выполнен зубчатый венец 18, который через шестерню 19 соединен с электродвигателем 2. С зубчатым венцом через шестерню 2О соединен также потенциометр 3, Устройство работает следующим образом. Перед захватам груза включают двигатель 2, Через шестерню 19, зубчатый венец 18 и шестерню 2О будут вращать ся обойма 4 и многооборотный потенциометр 3. При вращении обоймы 4 копир 15 поднимается в крайнее верхнее полрженке, которое фиксирует многооборот ный потенциометр 3. Копир 15 своим выступом воздействует на выступы рычагов 6, открывая их и выводит рычаг 12 из зацепления с зубчатой поверхностью Ю. Включают механизм вертикального перемещения перегрузочного устройства на головку изделия. После этого включают /щйгаттель 2 в обратном направлении, благодаря чему копир 15 начинает опускаться. При этом втулка 9 не вращается, так как трение между втулкой 9 и копиром 15, а также сцепными рычагами 6 и коп.иром 15 больше, чем трение качения между IB тулкой 9 и обоймой 4. Копир 15 сводит рычаги 6, захватывая головку изделия. В момент полного захвата изделия, который фиксируется многооборотным потенциометром 3, фиксатор входит в зубчатую поверхность Ю и двигатель 2 отключают. Груз поднимают и переносят к месту установки. Для ориентации изделия по углу относительно места установки включают привод 2 в том же направлении, что и при захвате груза. При этом копир 15 опускается вниз, а выступы копира скользят по прямолинейному участ ку 7 рычагов 6. Размер прямолинейного участка на 1-2 мм больше шага резьбы на резьбовом соединении копира. За один оборот изделия рычаг 12 переместится на глубину зубца поверхности 10. Угол поворота фиксируется многооборотным аотенциомЕтром 3. Устройство позволяет осуществлять автоматически захват и освобождение грузов с фигурной головкой и их поворот вокруг вертикальной оси в стесненных условиях, например при загрузке ядерных реакторов. Формулаизобретения Захватное устройство для грузов с фигурной головкой, содержащее корпус, шарнирно установленные в корпусе захватные рычаги, привод для управления захватными рычагами и механизм поворота захватных рычагов вокруг вертикальной оси, включающий в себя двигатель, отличающееся тем, что с целью обеспечения работы в стесненных условиях путем уменьшения габаритов устройства, оно снабжено закрепленным в корпусе с возможностью пос тупательного перемевчения валом, на котором жестко закреплен копир для взаимодействия с захватными рычагами и выполнена кольцевая выточка, закрепленной на валу посредством резьбового соединения обоймой с зубчатым венцом, связанным с двигателем посредством шестерни, установленной с возможностью поворота относительно корпуса, размещенной внутри обоймы с возможностью вращения втулкой с зубчатбй торцовой поверхностью и шарнирио закрепленным в обойме Т-образным фиксирующим рычагом, одно из плеч которого взаимо592584О4
действует с кольцевой выточкой вала, а1, Патент Франции № 1329О72,
- с зубчатой поверхностью втул- кл. В 66 С 1/66, 1963, ч.2. Авторское свидетельство СССР
Источники информации,№ 345О85, кл. В 66 С 1/66, 1972
принятые во .внимание гфи экспертизе 5 (прототип;.
fpuz. 1
1риг.2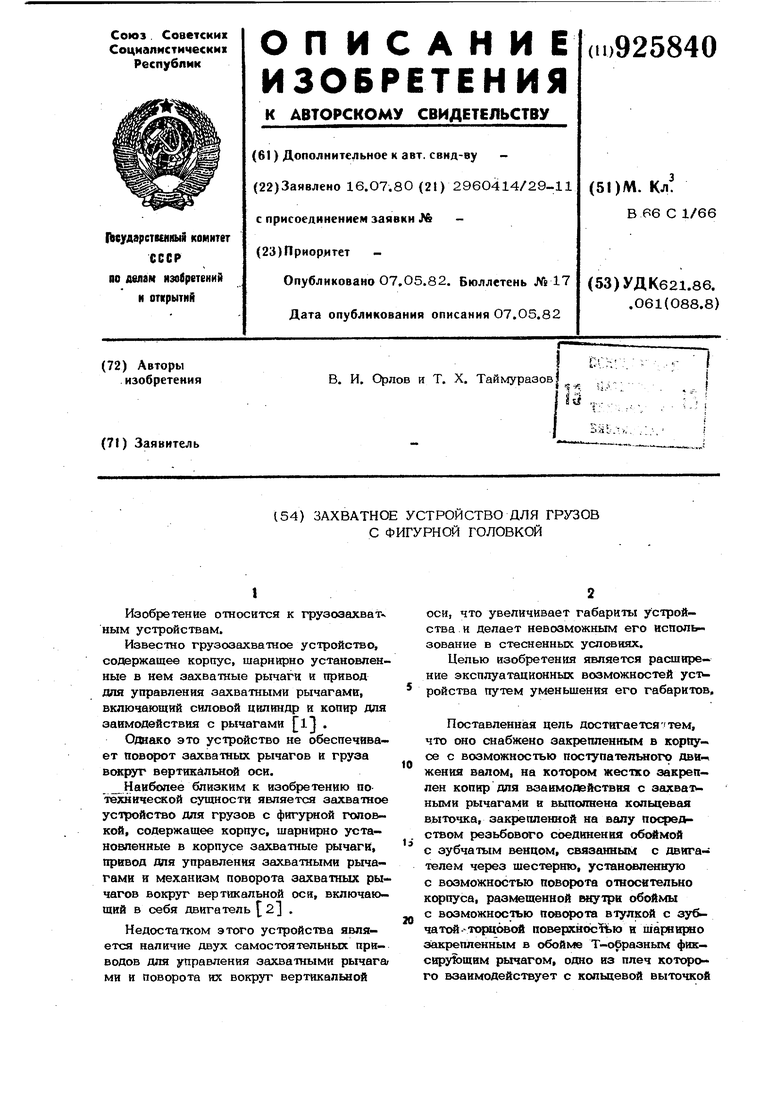
| название | год | авторы | номер документа |
|---|---|---|---|
| Переносной токарный станок для обработки концов труб | 1988 |
|
SU1636129A1 |
| Переносной токарный станок для обработки концов труб | 1989 |
|
SU1710193A1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ НЕПОВОРОТНЫХ СТЫКОВ ТРУБ | 1971 |
|
SU427812A1 |
| Ходовая часть грузоподъемного средства | 1980 |
|
SU933611A1 |
| Захватное устройство | 1981 |
|
SU1008138A1 |
| Патрон для метчиков | 1976 |
|
SU650744A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| ШВЕЙНАЯ МАШИНА ЗИГЗАГ | 1999 |
|
RU2151225C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2003 |
|
RU2304245C2 |
| Опорно-поворотное устройство грузоподъемных механизмов | 1972 |
|
SU554428A1 |
