(5) СПОСОБ ДЕМПФИРОВАНИЯ АВТОКОЛЕБАНИЙ В АНАЛОГО-ЦИФРОВЫХ СЛЕДЯЩИХ СИСТЕМАХ
I
Изобретение относится к автоматике и может быть использовано в системах автоматического управления с цифровой обработкой сигналов.
Известен способ повышения устойчивости цифровых измерительных приборов, заключающийся в периодическом изменении компенсирующего сигнала на определенную величину (в сторону увеличения и в сторону уменьшения вблизи дискретных значений) СП.
Однако схемная реализация имеет сложное решение, к тому же при использовании указанного способа в системе могут возникнуть вынужденнце колебания, обусловленные наличием компенсирующего сигнала.
Наиболее близким к предлагаемому является способ демпфирования автоколебаний в аналого-цифровых следящих системах путем измерения входного сигнала в зоне первого уровня квантования и формирования на выходе системы сигнала, пропорционального
входному.В зоне сигналов до величины младшего разряда L2.
Однако при известном способе существенно усложняется измерительная цепь прибора, снижается быстродействие и не обеспечивается полная гарантия исключения автоколебаний в младшем разряде, что снижает надежность.
Цель изобретения - повышение быстродействия и надежности.
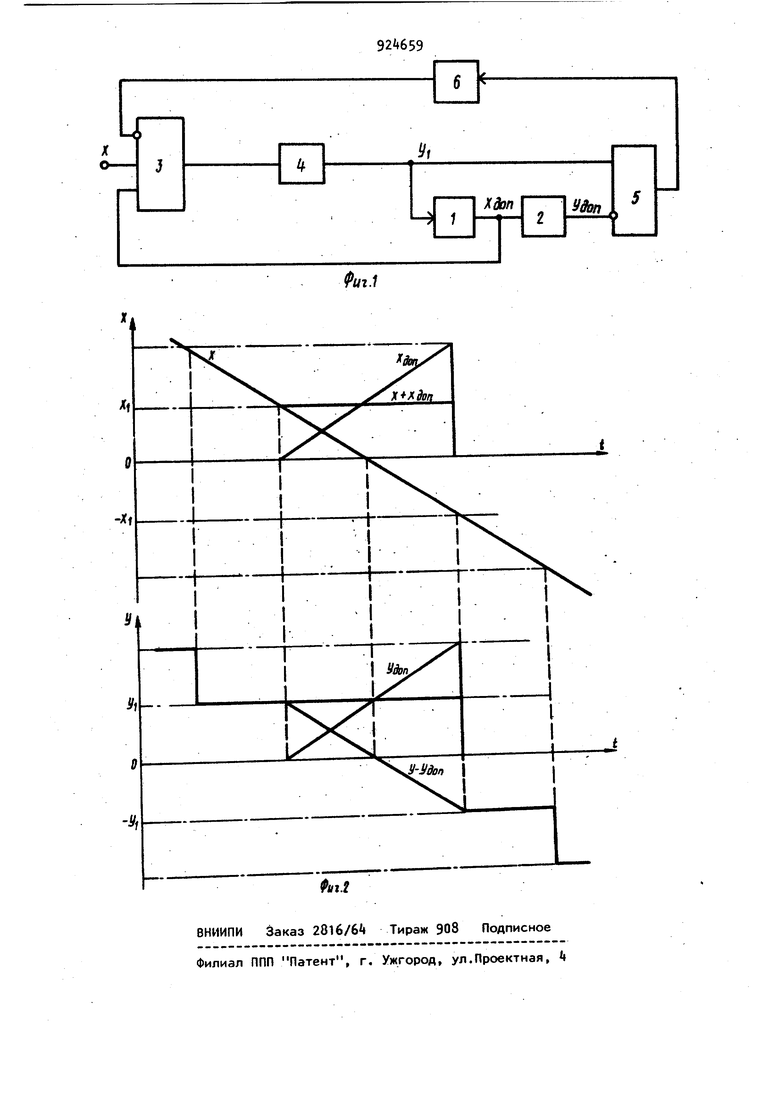
Указанная цель достигается тем, что формируют дополнительный сигнал, линейно изменяющийся во времени, суммируют его с входным сигналом, ограничивают дополнительный сигнал в момент достижения суммой входного и дополнительного сигналов первого уровня квантования и из сигнала, соответствующего величине младшего разряда на выходе системы, вычитают линейно преобразованный дополнительный сигнал. На фиг. 1 приведена функциональная схема устройства, реализующего предлагаемый способ демпфирования автоколебаний в аналого-цифровых следящих схемах; на фиг. 2 - временные диаграммы сигналов, иллюстрирующие способ. Функциональная схема устройства содержит генератор 1 линейно изменяю щегося сигнале, линейный преобразова тель 2, сумматор 3 цифровой регулятор 4, объект 5 регулирования и датчик 6 обратной связи. Способ осуществляется следующим образом. Если входной сигнал X меньше пер вого уровня квантования Хд, то генератором 1 формируется дополнитель ный линейно изменяющийся во времени сигнал Xqcjn , который сумматором 3 алгебраически суммируется со входным сигналом X. Одновременно Xojovi преобразуется линейным преобразователем 2 в соответствующий по величи не сигнал YQQ. При этом коэффициент преобразования определяется следующим соотношением: f - к. - угЛСигнал Xqon, а соответственно и сигнал Yqov, увеличиваются до того момента, пока алгебраическая сумма входного и дополнительного сиг налов не станет равной первому уров ню квантования Х. Момент равенства соответствует моменту появления на выходе цифрового регулятора си нала, равного первому уровню квантования Y , который управляет работой генератора 1. В дальнейшем при любом изменении входного сигнала X в пределах первого уровня квантования выполнение равенства суммы входного и дополнительного сигналов первому уровню квантования обеспечивается соответствующим изменением дополнительного сигнала Хшр. При этом на прямой с5б-ьекта. регулирования подается сигнал, соответствующий Величине младшего разряда Y , а на инверсный - преобразован ный дополнительный сигнал Хдоп. Результирующий сигнал, который непосредственно воздействует на регулируемый параметр, определяется в соответствии со следующим выражением: Y Y - YQQH Если входной сигнал X превышает первый уровень квантования, то устройство работает в обычном режиме. При этом на выходе генератора 1 сигнал отсутствует. В результате при использовании предлагаемого способа г1сключение влияния зоны нечувствительности квантования по уровню повышает устойчивость аналого-цифровых следящих систем и позволяет получить определенный технико-экономический эффект. Формула изобретения Способ демпфирования автоколебаний в аналого-цифровых следящих сисteMax, включающий измерение входного сигнала в зоне первого уровня квантования и формирование на выходе системы сигнала, пропорционального входному в зоне сигналов до величины младшего разряда, о т л и ч а ющ и и с я тем, что, с целью повышения быстродействия и надежности, формируют дополнительный сигнал, линейно изменяющийся во времени,суммируют его с входным сигналом, ограничивают дополнительньЛ сигнал в момент достижения суммой входного и дополнительного сигналов первого уровня квантования и из сигнала, соответствующегй величине младшего разряда на выходе, системы, вычитают линейно преобразованный ограниченный дополнительный сигнал. Источники информации, принятые во внимание при экспертизе 1.Триневич Ф.Б. и др. Об устойчивости следящих цифровых измерительных приборов, зависящей от их статистических характеристик, - Автометрия, 1967, If 1, с. 62. 2.Кондалов А.И. Преобразователи формы информации. Киев, Наукова думка, 19б5, с. 62 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| Нерекурсивный цифровой фильтр | 1983 |
|
SU1171994A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| Аналого-цифровой преобразователь изображений | 1989 |
|
SU1753447A1 |
| Аналого-цифровой преобразователь с плавающей запятой | 1975 |
|
SU750725A1 |
| Многоканальный цифровой коррелятор | 1983 |
|
SU1211753A1 |
| Параллельно-последовательный аналого-цифровой преобразователь | 1983 |
|
SU1221751A1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2326494C1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
| Следящий аналого-цифровой преобразователь | 1985 |
|
SU1361713A1 |