(5) УСТРОЙСТВО КОМПЕНСАЦИИ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации кинематической погрешности | 1977 |
|
SU714069A1 |
| Корригирующее устройство | 1986 |
|
SU1404215A1 |
| Станок для обработки оптических деталей | 1986 |
|
SU1340998A1 |
| Стенд для испытания муфт | 1990 |
|
SU1763925A1 |
| МУФТА СВОБОДНОГО ХОДА | 1982 |
|
SU1074180A2 |
| КОРОБКА ПЕРЕДАЧ | 1991 |
|
RU2017034C1 |
| Коррекционное устройство к зубофрезерным станкам | 1954 |
|
SU105161A2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШЕСТЕРЕН И КОНТРОЛЯ СБОРКИ ИЗ НИХ МНОГОПОТОЧНЫХ ВЕРТОЛЕТНЫХ РЕДУКТОРОВ | 2002 |
|
RU2236341C1 |
| Фрикционный вариатор | 1977 |
|
SU752076A1 |
| ЗУБЧАТЫЙ ВАРИАТОР | 1997 |
|
RU2136989C1 |
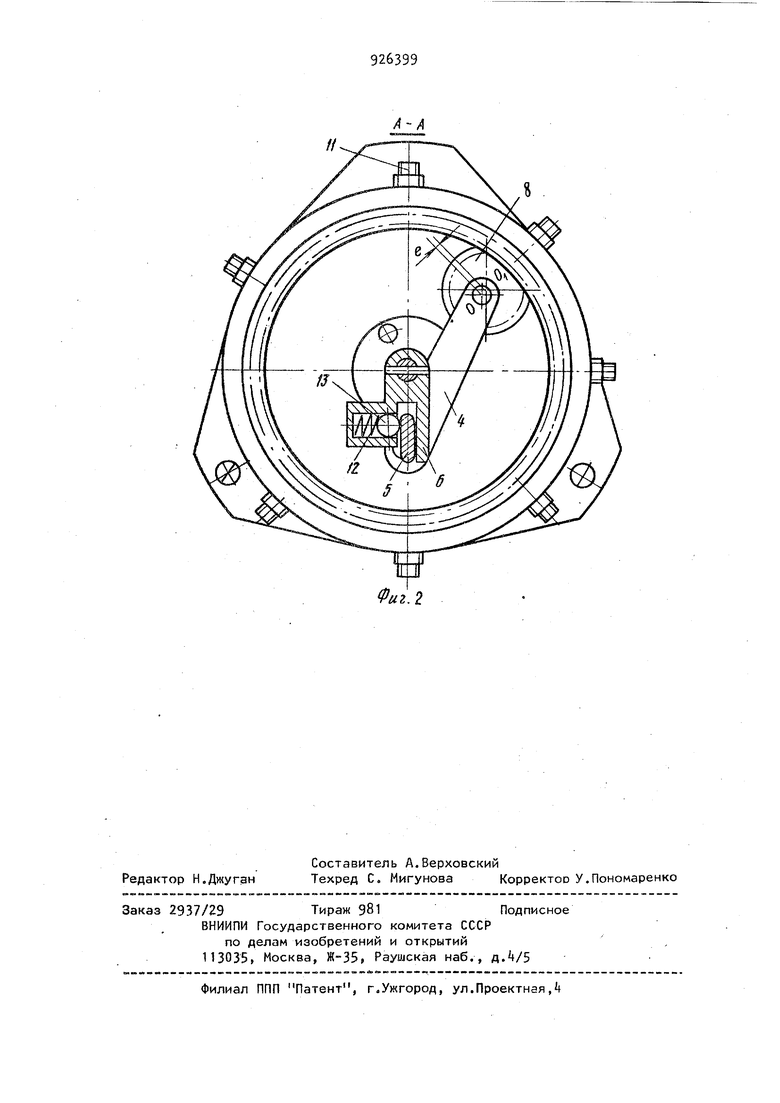
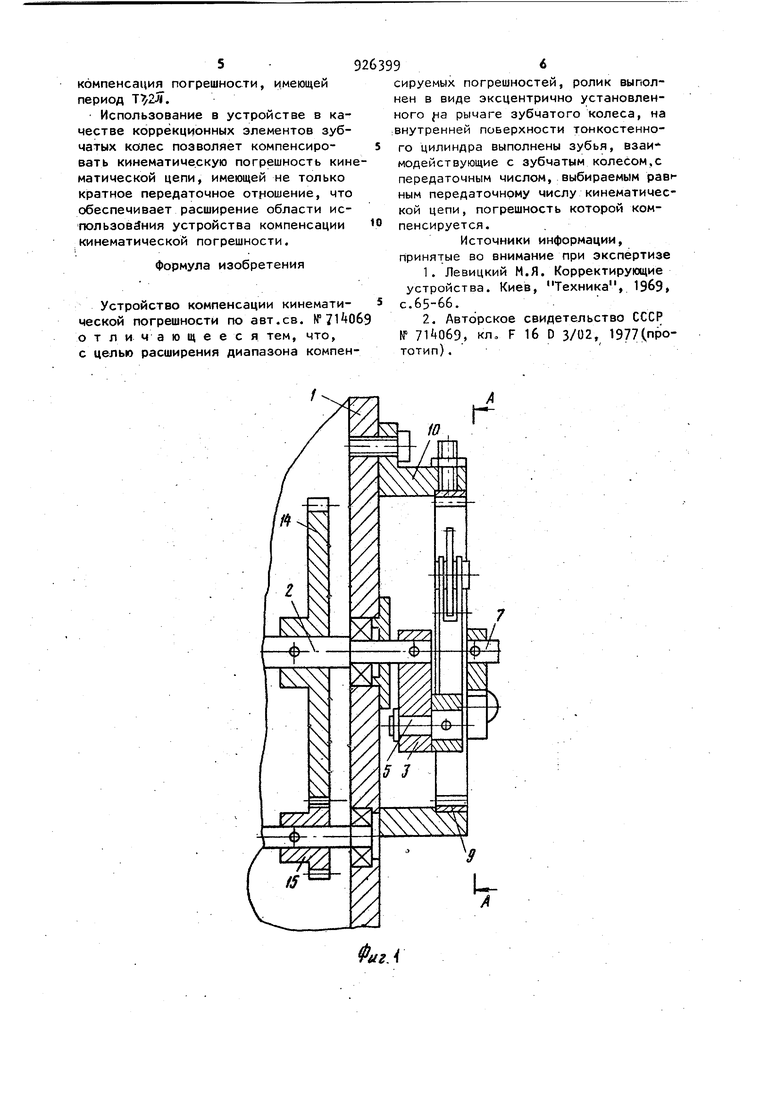
Изобретение относится к машиност роению и может быть использовано в механизмах, содержащих точные кинематические цепи. Известны устройства компенсации кинематической погрешности механизмЬв, состоящие из системы рычагов, ролика и корректирующего элемента, выполненного, например, в виде плос кой мембраны, изгибаемой регулирово ными винтами 1 1. Однако данные устройства обеспечивают невысокую точность компенсации, так как позволяют компенсировать погрешности, имеющие плавный характер, низкую частоту и небольшую амплитуду. Кроме того, устройст ва не позволяют компенсировать погрешность, имеющую период изменения, не равный 1 обороту вала. По основному авт.св. № из вестно устройство компенсации кинематической погрешности, содержащее корпус, размещенные в нем ведущий вал, жестко связанный с ним кронштейн, ведомый вал с поводком, упругий корректирующий элемент, воздействующие на него регулировочные винты и взаимодействующий с упругим корректирующим элементом и поводком ведомого вала рычаг с роликом, размещенный на кронштейне и подпружиненный в направлении упругого корректи-рующего. элемента, в корпусе выполнено соосное валам отверстие, а упругий корректирующий элемент выполнен в виде тонкостенного цилиндра и установлен с натягом в отверстии корпу. са 2. . Однако известное устройство также не обеспечивает расширение диапазр1на компенсируемых погрешностей.Целью изобретения является расширение диапазона компенсируемых погрешностей. Указанная цель достигается за счет, того, что ролик выполнен в виде эксцентрично установленного на 39 рычаге зубчатого колеса, на внутренней поверхности тонкостенного цилинд ра выполнены зубья, взаимодействующие с зубчатым колесом и передаточным числом, выбираемым равным передаточному числу кинематической цепи, погрешность которой компенсируется. На фиг.1 изображено устройство компенсации кинематической погрешности и кинематической цепи механизма, кинематическая погрешность которой компенсируется, осевой разрез, на фиг.2 - сечение А-А,на фиг. Устройство состоит корпуса 1, ведущего вала 2, жестко закреплен(Ного на нем кронштейна 3, несущего рычаг kf жестко связанную с ним ось 3,сопрягаемую с кронштейном с возможностью поворота и свободным концом, имеющим форму лапки, заходящую в паз по .водка 6,жестко закрепленного на ведомом валу 7. На свободном конце рычага и имеется зубчатое колесо 8, зацепляемое с внутренним зубчатым венцом тонкостенного корректирующего элемента 9, посаженного, например с натягом в отверстие стакана Ю, в резьбовые отверстия стакана ввернуты регулировочные винты 11. Зазоры в подвижных сопряжениях выбираются пружиной 12, воздействующей на ша рик 13 поводка 6. На ведущем валу ус тановлено зубчатое колесо 1, зацепляемое с ведущей шестерней 15, образуадие кинематическую цепь механизма кинематическая погрешность которой подвергается компенсации. Устройство работает следующим образом. При вращении ведущего вала 2, которое он получает от зубчатого колеса Ни шестерни 15, через лапку оси 5 движение передается поводку 6, при этом зубчатое колесо 8 рычага k катится по внутреннему зубчатому венцу корректирующего элемента 9. При отсутствии необходимости компенсации эксцентриситет (ось О со падает с осью 0), а зубчатый венец корректирующего элемента не деформирован и концентричен оси вращения кронштейна 3. При этом относительное угловое положение кронштейна 3 и по водка 6 остается неизменным. При необходимости компенсации ки нематической погрешности кинематической цепи, состоящей из зубчатого колеса 1А и шестерни 15, такая погрешность анализируется с целью разложения на составляющие гармоники 1-го порядка (кинеметичаская погрешность ведомого колеса 1) и 2-го порядка кинематическая погрешность ведущей шестерни 15) а также фазовой привязки указанных составляющих о По имеющимся данным определяют, в зависимости от передаточной функции рычага 4 и лапки оси 5, необходимый эксцентриситет зубчатого коЛеса 8, компенсирующий 2-ю гармонику, и величину деформации или эксцентриситета корректирующего элемента 9, компенсирующего 1-ю гармонику Обеспечение указанных коррекционных смещений может осуществляться различными конструктивными способами, в том числе может быть заложено заранее на основании вероятностной гоценки кинематической погрешности кинематической цепи механизма о В данном, примере колесо 8 выполнено эксцентричным (ось вращения О смещена на величину 6 относительно геометрической оси 0), а эксцентричное положение корректирующего элемента 9 обеспечивается за счет поперечного смещения стакана 10 или.его радиальной деформацией (за счет упругости) регулировочными винтами 11. В результате зубчатое колесо 8 при качении по внутреннему зубчатому венцу получает дополнительное, периодическое перемещение в радиальном направлении, причем период этот равен периоду кинематической погрешности шестерни 15., рычаг Л вместе с лапкой оси 5 поворачиваются относительно кронштейна 3 и поводка 6, который получает дополнительный (компенсирующий)поворот на требуемую величину. При этом происходит суммирование векторов эксцентриситетов колеса 8 и зубчатого венца корректирующего элемента 9, вызывающих перемещение рычага k. Результирующая величина этого-перемещения в каждой точке углового положения вала 7 зависит от угла фазового положения между векторами эксцентриситетов и их величины. Так как передаточное отношение зубчатого колеса 8 и зубчатого венца корректирующего элемента 9 устройства компенсации и шестерни 15 и колеса k равны, то период функции koppeктиpyющeгo перемещения рычага и период функции, компенсируемой кинематической погрешности равны, т.е. обеспечивается компенсация погрешности, имеющей период . Использование в устройстве в качестве коррёкционных элементов зубчатых колес позволяет компенсировать кинематическую погрешность кин матической цепи, имеющей не только кратное передаточное отношение, что обеспечивает расширение области использовйния устройства компенсации кинематической погрешности. Формула изобретения Устройство компенсации кинематической погрешности по авт.св. о т л и ч а ю щ е е с я тем, что, с целью расширения диапазона компен 96 сируемых погрешностей, ролик выполнен в виде эксцентрично установленного на рычаге зубчатого колеса, на :Внутренней поверхности тонкостенного цилиндра выполнены зубья, взаимодействующие с зубчатым колесом.с передаточным числом, выбираемым передаточному числу кинематической цепи, погрешность которой компенсируется. Источники информации, принятые во внимание при экспертизе 1.Левицкий М.Я. Корректирующие устройства. Киев, Техника, 19б9, с.65-66. 2.Авторское свидетельство СССР № , кл F 16 D 3/02, 1977(,прототип).
г.
