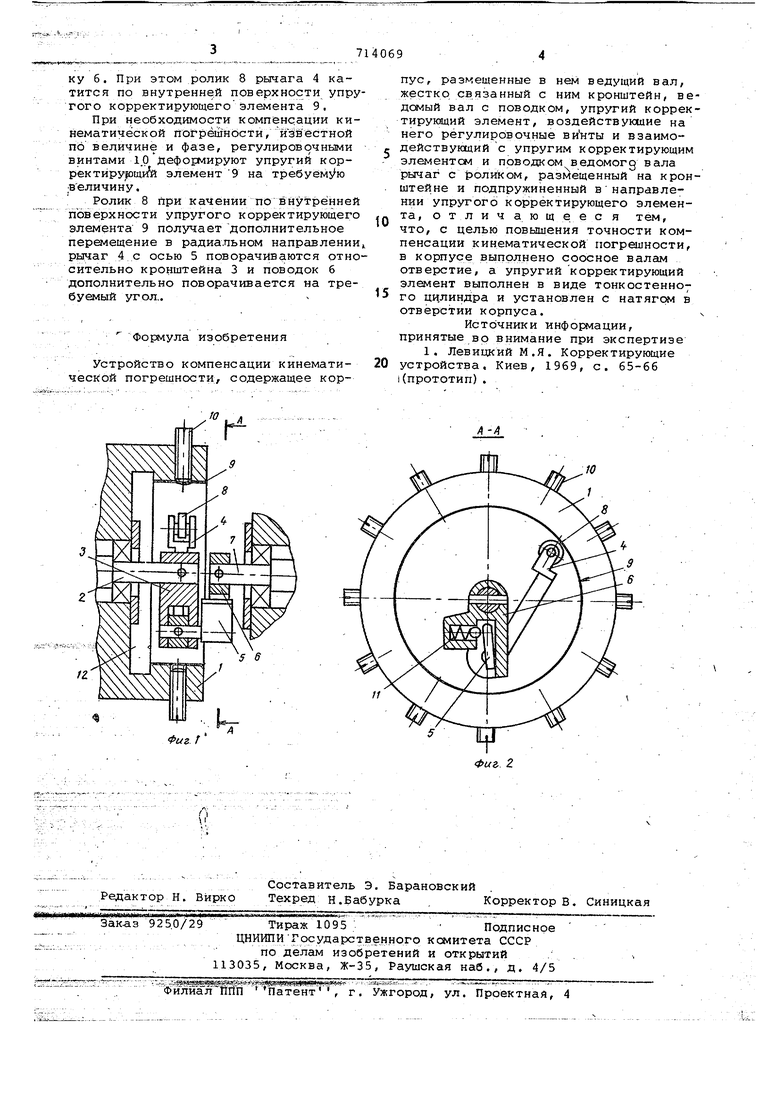
Изобретение относится к приборостроению и станкостроению и может быть использовано в механизмах, содержащих точные кинематические цепи для компенсации кинематической погрешности. Известно устройство компенсации кинематической погрешности, содержа щее корпус, размещенные в нем ведущий вал, жестко связанный с ним кро штейн, ведомый вал с паводксм, упру гий корректирующий элемент, воздейс вующие на него регулировочные винты и взаимодействукадий с упругим корректирующим элементом и поводком ве дсмого вала рычаг с роликом, размещенный на кронштейне и подпружиненный в направлении упругого корректи рующего элемента 1. Недостатком этого устройства является низкая точность ксмпенсации кинематической погрешности, лыэванная ограниченной амплитудой ксмпенсируемых погрешностей. Целью изобретения является повышение точности компенсации кинемати ческой погрешности. Длядостижения этой цели в корпу е выполнено соосное валам отверстие, а упругий корректиругаций элемент выполнен в виде тонкостенного цилиндра и установлен с натягал в отверстии корпуса. На фкг. 1 изображено устройство ксг.1пенсации кинематической погрешности, продольный разрез; нафиг. 2 разрез А-А фиг. -I-. Устройство содержит корпус 1, ведущий вал 2, жестко связанный с ним кронштейн 3. С кронштейном 3 связан рычаг 4, имеющий ось 5. Последняя « своим концом в форле лапки воздействует на поводок 6, закрепленный на ведсмом валу 7. На конце рычага 4 имеется ролик 8, взаимодействукйций с упругим коррек- тирующим элементом 9, выполненном в виде тонкостенного цилиндра . Дл изменения формы упругого корректирующего элемента 9 служат регулировочные винты 10. Прижимрычага 4 к упругому корректирующему элементу 9 осуществляется с помощью пружины 11. Элемент 9 размещен с натягом в соосном валам 2 и 7 отверстии 12, выполненном в корпусе. Устройство работает следующим образам, .При вращении ведущего вала 2 через ось 5 вращение передается поводку 6. При этом ролик 8 рычага 4 катится по внутренней поверхности упру гого корректирующего элемента 9, При необходимости кoмпiэнqaции кинематической погрешности, известной по величине и фазе, регулировочными винтами 1.0деформируют упругий корректйру;{ощ Й5 элемент 9 на требуём ю величину. Ролик 8 при качении по внутренней поверхности упругого корректирующего элемента 9 получает дополнительное перемещение в радиальном направлении рычаг 4с осью 5 поворачиваются отно сительно кронштейна 3 и поводок 6 дополнительно поворачивается на требуемый угол,. Формула изобретения Устройство компенсации кинематической погрешности, содержащее корrt V
Фиг f
А-А
10 пус, размещенные в нем ведущий вал, жестко связанный с ним кронштейн, ведсмый вал с поводком, упругий корректирукядий элемент, воздействукшие на него регулировочные винты и взаимодействующий с упругим корректирующим элементом и поводком ведомогд вала рычаг с роликом, размещенный на кронштейне и подпружиненный внаправлении упругого корректирующего элемента, о т л и ч а ю щ е, е с я тем, что, с целью повышения точности компенсации кинематической погрешности, в корпусе выполнено соосное валам отверстие, а упругий корректирующий элемент выполнен в виде тонкостенно7 го цилиндра и установлен с натягом в отверстии корпуса. Источники информации, принятые во внимание при экспертизе 1, Левицкий М.Я. Корректирующие устройства. Киев, 1969, с. 65-66 I (прототип).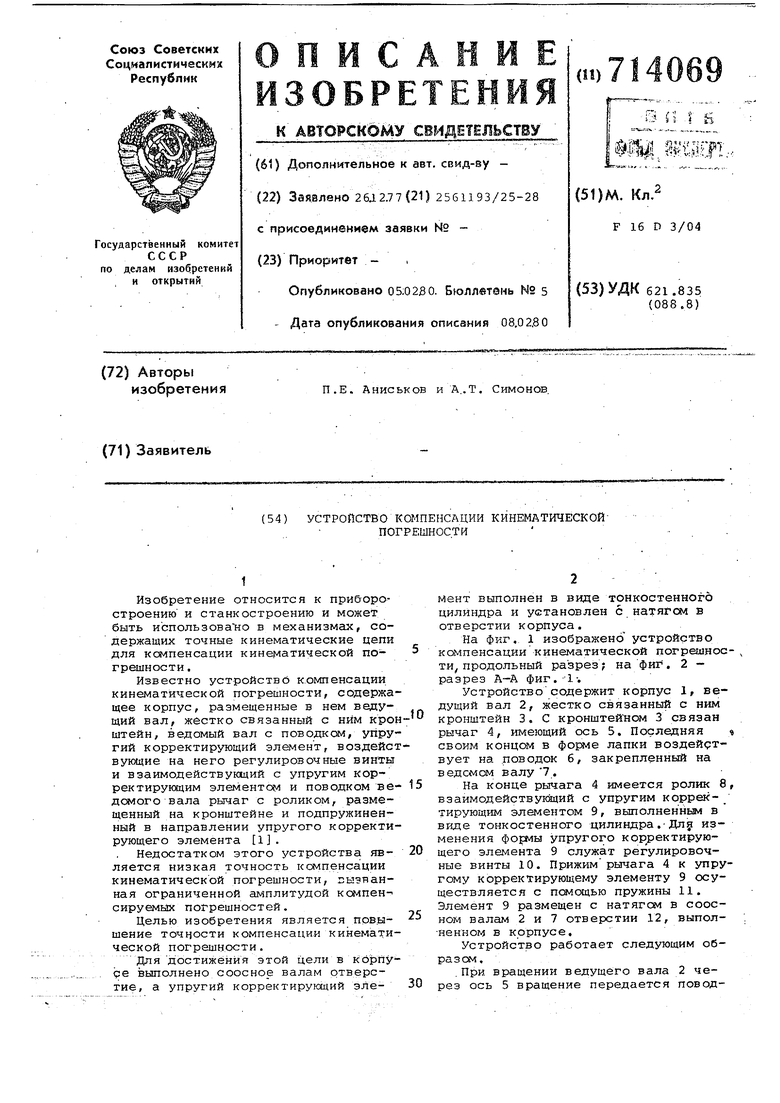
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации кинематической погрешности | 1980 |
|
SU926399A2 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Винтовой привод | 1987 |
|
SU1523802A1 |
| ГИДРОЦИЛИНДР РУЛЕВОЙ МАШИНЫ | 2006 |
|
RU2329411C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1997 |
|
RU2117900C1 |
| Устройство для правки лезвий безопасных бритв | 1990 |
|
SU1712131A1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2298714C2 |
| Поводково-рычажная муфта | 1991 |
|
SU1795182A1 |
| Фрикционная муфта сцепления | 1985 |
|
SU1333908A1 |
| Делительное устройство | 1981 |
|
SU1009718A1 |
