( 5 ) РЕГУЛИРУЕМЫЙ ИНЕРЦИОННЫЙ ИМПУЛЬСНЫЙ
I
Изобретение относится к машиностроению, а именно к устройствам для создания на ведомом звене импульсов инерционного вращающего момента.
Известен инерционный импульсный механизм, содер ащий ведущий вал, неуравновешенные сателлиты с регулируемыми грузами, установленные на ведомом водиле
Наиболее близким к изобретению является регулируемый инерционный импульсный механизм, содержащий вeдyu ий вал, ведомое водило, установленные на нем два ряда неуравновешенных сателлитов и взаимодействующие с каждым из последних центральные колеса, установленные на ведущем валу с возможностью фиксированного относительного поворота 2.
Однако известные схемы илерционно-импульсных механизмов предназначены, как правило, для изменения импульса момента при каком-либо фикМЕХАНИЗМ
сированном значении выходной скорости, а получение различных внешних характеристик механизмов, т.е. различного характера изменения амплитуд вращающихся импульсов в зависимости от оборотов выходного вала, требует нейтральной регулировки дисбаланса сателлитов, что усложняет этот Процесс. Кроме того, диапазон изменения внешних характерис10тик механизмов сравнительно неширок, что обусловлено постоянным направлением вращения сателлитов относительно водила.
Цель изобретения - расширение
15 диапазона настройки,импульсной передачи на различные характеристики изменения амплитуд импульсов -инерционного момента при разных оборотах ведомого звена.
20
Поставленная цель достигается тем, что инерционный импульсный механизм, содержащий ведущий вал, ведомое водило, два рлда неуравновешенных сателлитов, установленные на последнем и взаимодействующие с центральными колесами, расположенными на ведущем валу с возможностью относительного разворота, снабжен третьим рядом неуравновешенных сателлитов, зацепляющимися с ними и установленными на водиле паразитными шестернями и взаимодействующим с последним третьим центральным колесом, установленным жестко на ведущем валу.
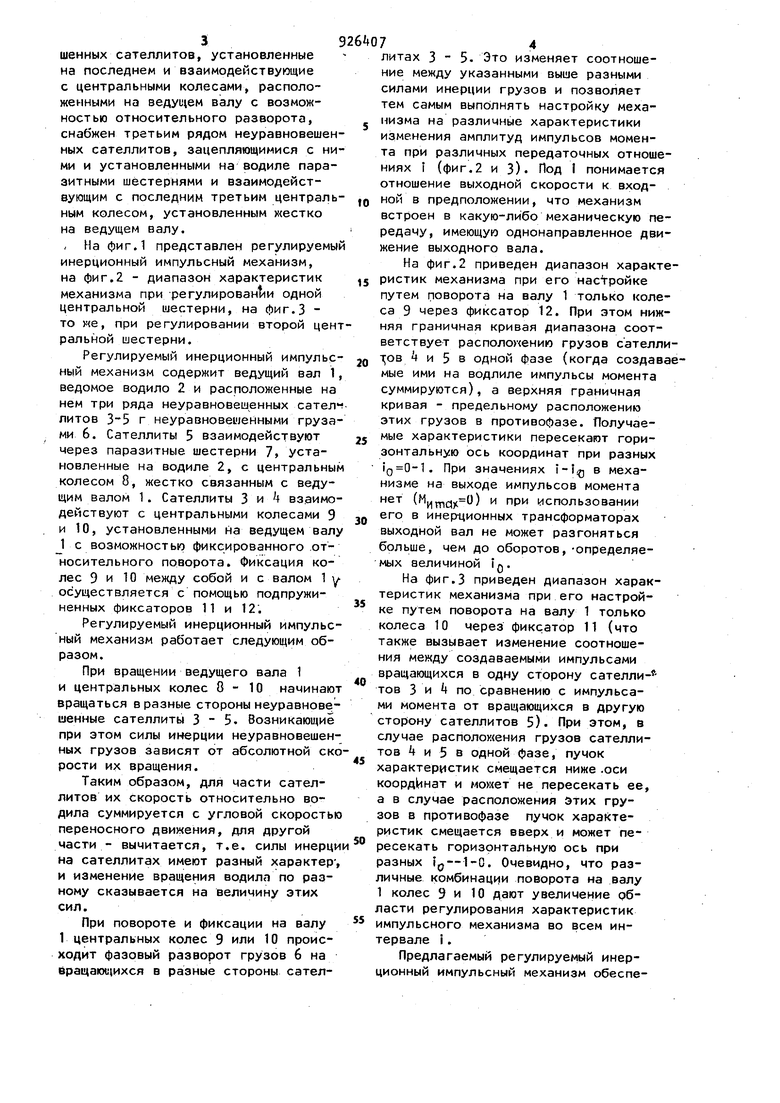
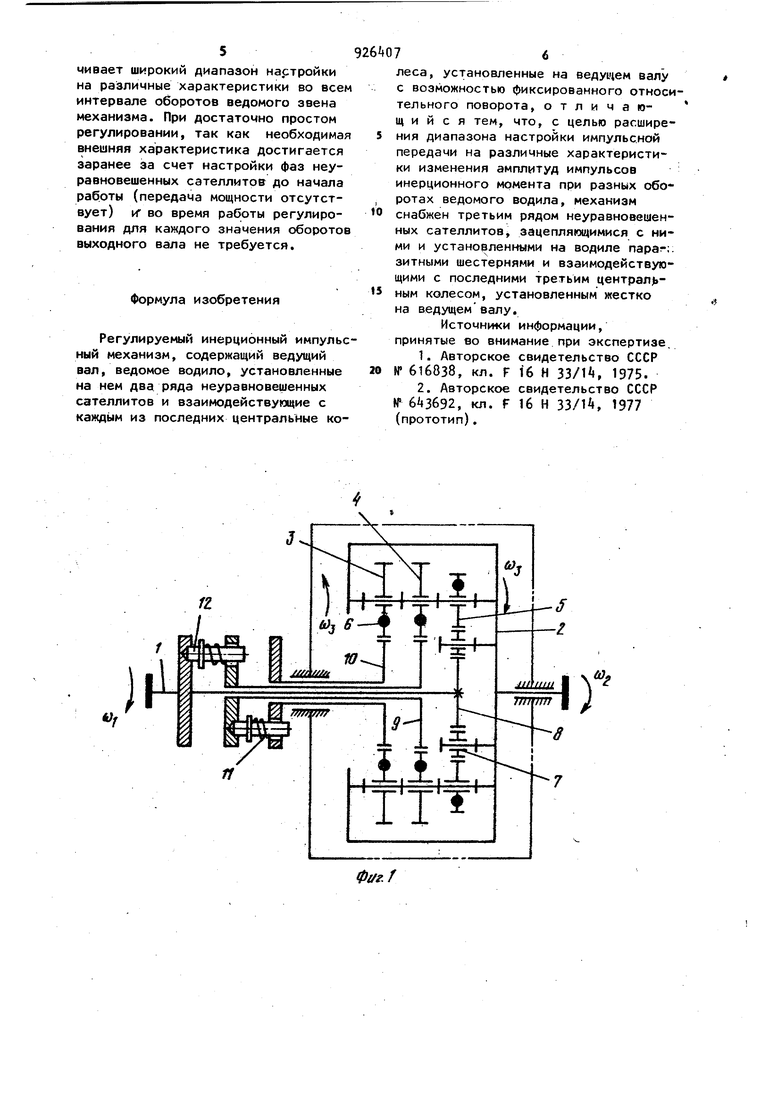
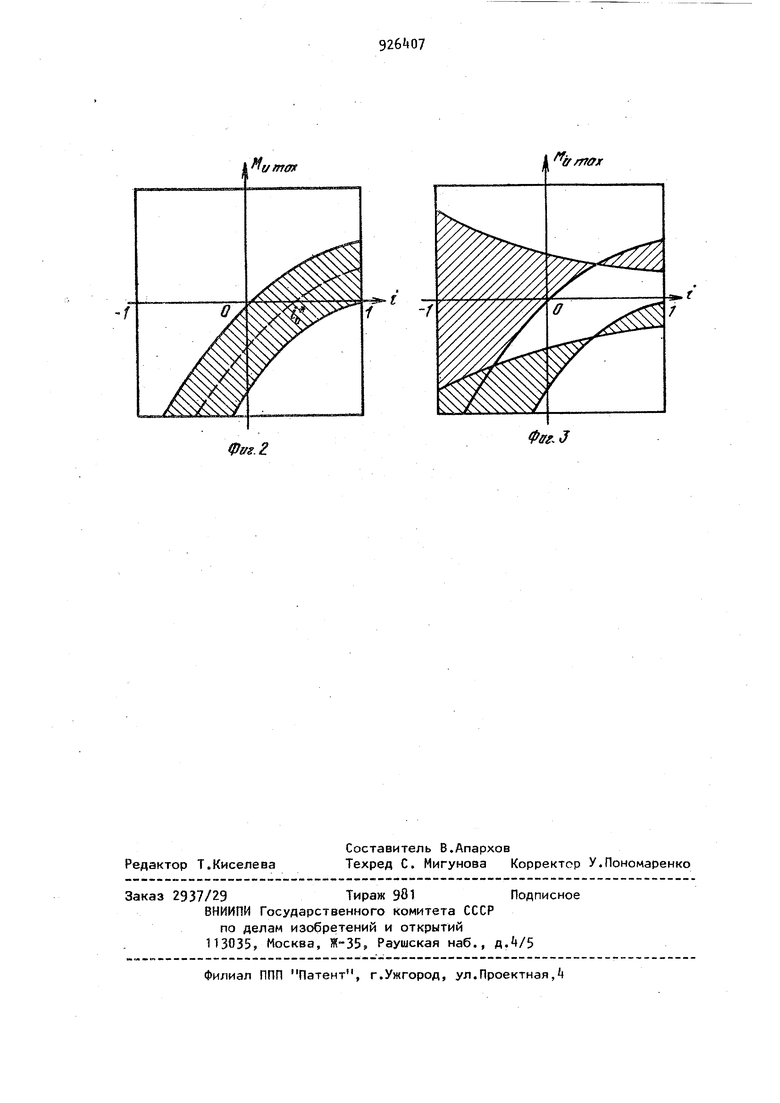
- На фиг.1 представлен регулируемый инерционный импульсный механизм, на фиг.2 - диапазон характеристик механизма при регулирован 1И одной центральной шестерни, на фиг.З то ке, при регулировании второй центральной шестерни.
Регулируемый инерционный импульсный механизм содержит ведущий вал 1, ведомое водило 2 и расположенные на нем три ряда неуравновешенных сател литов 3-5 г неуравновешенными грузами 6. Сателлиты 5 взаимодействуют через паразитные шестерни 7 установленные на водиле 2, с центральным колесом 8, жестко связанным с ведущим валом 1. Сателлиты 3 и i взаимодействуют с центральными колесами 9 и 10, установленными на ведущем валу 1с возможностью фиксированного .относительного поворота. Фиксация колес 9 и 10 между собой и с валом 1 у осуществляется с помощью подпружиненных фиксаторов 11 и 12.
Регулируемый инерционный импульсный механизм работает следующим образом.
При вращении ведущего вала 1 и центральных колес 0-10 наминают вращаться в разные стороны неуравновешенные сателлиты 3-5. Возникающие при этом силы инерции неуравновешенных грузов зависят от абсолютной скорости их вращения.
Таким образом, для части сателлитов их скорость относительно водила суммируется с угловой скоростью переносного движения, для другой части - вычитается, т.е. силы инерци на сателлитах имеют разный характер , и изменение вращения водила по разному сказывается на величину этих сил.
При повороте и фиксации на валу 1 центральных колес 9 или 10 происходит фазовый разворот грузов 6 на бращаю цихся в разные стороны сателлитах 3-5. Это изменяет соотношение между указанными выше разными силами инерции грузов и позволяет тем самым выполнять настройку механизма на различные характеристики изменения амплитуд импульсов момента при различных передаточных отношениях I (фиг.2 и 3). Под i понимается отношение выходной скорости к входной в предположении, что механизм встроен в какую-либо механическую передачу, имеющую однонаправленное движение выходного вала.
На фиг.2 приведен диапазон характристик механизма при его нас ройке путем поворота на валу 1 только колеса 9 через фиксатор 12. При этом нижняя граничная кривая диапазона соответствует располо ению грузов сателлi;oB 4 и 5 в одной фазе (когда создавмые ими на водлиле импульсы момента суммируются), а верхняя граничная кривая - предельному расположению этих грузов в противофазе. Получаемые характеристики пересекают горизонтальную ось координат при разных . При значениях i-iijj в механизме на выходе импульсов момента нет (M mcljc ) Р использовании его в инерционных трансформаторах выходной вал не может разгоняться больше, чем до оборотов, -определяемых величиной л.
На фиг.З приведен диапазон характеристик механизма при его настройке путем поворота на валу 1 только колеса 10 через фиксатор 11 (что также вызывает изменение соотношения между создаваемыми импульсами вращающихся в одну сторону сателли- тов 3 и i| по сравнению с импульсами момента от вращающихся в другую сторону сателлитов 5). При этом, в случае располок ения грузов сателлитов 4 и 5 в одной фазе, пучок характеристик смещается ниже .оси коорд 1нат и мо«ет не пересекать ее, а в случае расположения этих грузов в противофазе пучок характеристик смещается вверх и может пересекать горизонтальную ось при разных -1-0. Очевидно, что различные комбинации поворота на валу 1 колес 9 и 10 дают увеличение области регулирования характеристик импульсного механизма во всем интервале i.
Предлагаемый регулируемый инерционный импульсный механизм обеспечивает широкий диапазон настройки на различные характеристики во всем интервале оборотов ведомого звена механизма. При достаточно простом регулировании, так как необходимая внешняя характеристика достигается заранее за счет настройки фаз неуравновешенных сателлитов до начала работы (передача мощности отсутствует) к во время работы регулирования для каждого значения оборотов выходного вала не требуется.
Формула изобретения
Регулируемый инерционный импульсный механизм, содержащий ведущий вал, ведомое водило, установленные на нем два ряда неуравновешенных сателлитов и взаимодействующие с каждым из последних центральные колеса, установленные на ведущем валу с возможностью фиксированного относительного поворота, отличаю- щ и и с я тем, что, с целью расширения диапазона настройки импульсной передачи на различные характеристики изменения амплитуд импульсов инерционного момента при разных оборотах ведомого водила, механизм снабжен третьим рядом неуравновешенных сателлитов зацепляющимися с ними и установленными на водиле параг;; зитными шестернями и взаимодействующими с последними третьим цеитрал ным колесом, установленным жестко на ведущем валу.
Источники информации, принятые во внимание при экспертизе.
1.Авторское свидетельство СССР № 616838, кл. f 16 Н 33/1, 1975.
2.Авторское свидетельство СССР № 6 43692, кл. F 16 Н 33/14, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| Импульсный механизм | 1980 |
|
SU949263A1 |
| Инерционно-импульсный привод инструмента | 1983 |
|
SU1135940A1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Планетарный импульсный механизм | 1973 |
|
SU557222A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| ПЛАНЕТАРНЫЙ ИНЕРЦИОННЫЙ МЕХАНИЗМ | 1989 |
|
RU2017040C1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА | 1992 |
|
RU2049284C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
jf
tfi
Л7в
фиг. г
ff/rrffx
Фггг.
