(5) ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР;-.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический регулятор | 1989 |
|
SU1619230A2 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНОГО СИГНАЛА | 1992 |
|
RU2050574C1 |
| Пневматическое управляющее устройство для регулирования температуры и уровня куба ректификационной колонны | 1978 |
|
SU752243A1 |
| Пневматический резервный регулятор | 1990 |
|
SU1734073A1 |
| Пневматический адаптивный регулятор | 1977 |
|
SU656022A1 |
| Пневматический регулятор | 1989 |
|
SU1716481A1 |
| Пневматический пропорционально-интегральный регулятор | 1990 |
|
SU1691818A2 |
1
Изобретение относится к средствам автоматического управления технологическими установками, обладащими значительным транспортным запаздыванием.
Известна панель управления для систем регулирования с запаздыванием, включающая переключающее реле, пропорционально-интегральные регу/1ирую1цие устройства и задатчики, соединенные с каналом задания регулятора и через реле с выходами регуляторов 1.
Недостатком известного регулятора является то, что при изменении задания регулируемого параметра (ввиду 3815 паздывания в объекте) возникают значительные выбросы параметра.
Наиболее близким к предлагаемому по технической сущности является Пневматический регулятор, содержащий пере20 ключающее реле, разомкнутый контакт которого подключен к выходу задатчи,ка, а замкнутый - к выходу пропорционально-интегрального регулятора, канал параметра которого соединен с входным каналом регулятора, а канал управления переключающего реле соединен с первым каналом управления регулятора 2.
Однако данный регулятор имеет ограниченную область применения, так как может быть реализован лишь на базе регуляторов типа ПР 3.21. В регуляторах же с комбиниров.анными связями и общим сумматором этот регулятор не может быть использован.
Цель изобретения - исключение динамической ошибки переходного режима при изменении задания.
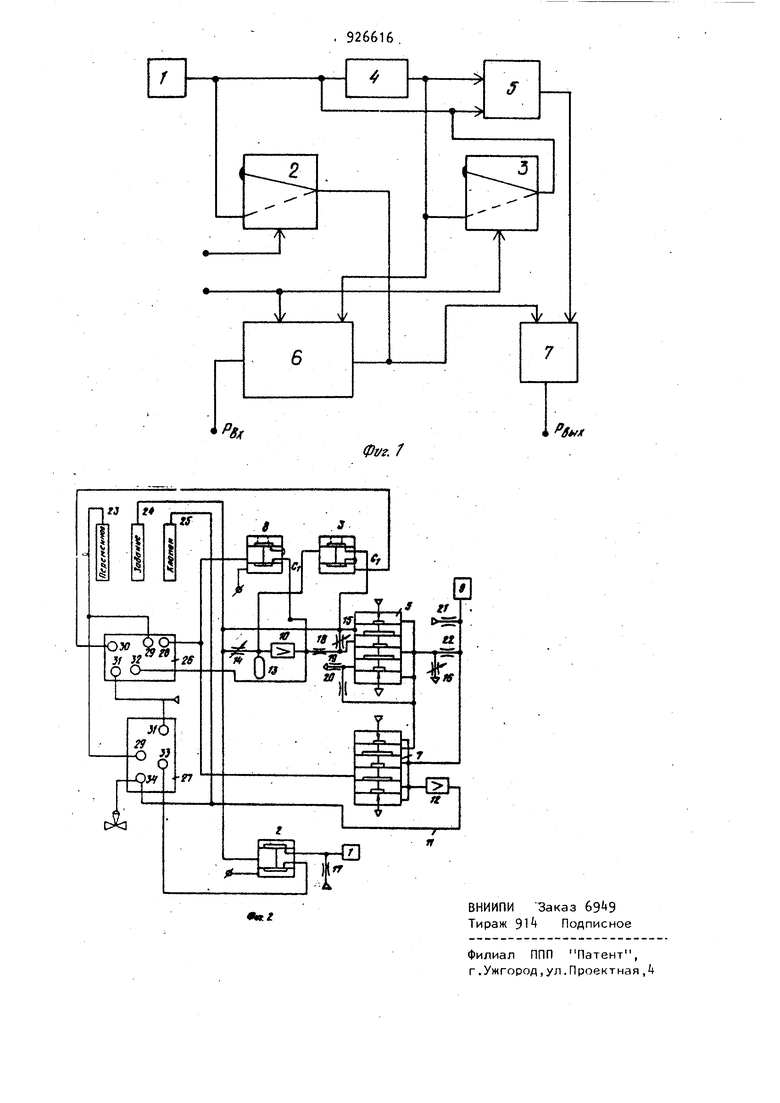
Поставленная цель достигается тем, что в регуляторе установлены элемент задержки, два сумматора и второе переключающее реле, причем выход задатмика подключен к плюсовому входу первого сумматора и входу второго переключающего реле, разомкнутый контакт которого соединен с выходом элемента задержки, входом подключенным к выходу задатмика, минусовым входам первого сумматора и каналам задания пропорционально-интегрального регулятора,,,. канал отключения которого и канал управления второго переключающего реле соединены с вторым каналом управления регулятора, выход первого сумматора и выход пропорциональнс интегрального регулятора соединены с входами второго сумматора, выходом подключенного к выходному каналу регулятора. На фиг. 1 представлена структурная схема предлагаемого регулятора; на .фиг. 2 - принципиальная схема регуля тора (вариант ) . Регулятор содержит з,адатчик 1, пе реключающие реле 2 и 3, элемент k за держки, сумматор 5 с переменным коэф фициентом усиления, пропорциональноинтегральный (пи) регулятор 6 и сумматор 7. Рассмотрим работу регулятора в режиме Автомат (контакты реле 2 и В верхнем по схеме положении, регуля тор 6 включен). Входной сигнал (регулируемая переменная), поступая по каналу Рп., под ключен к каналу параметра регулятоpa 6, где сравнивается со значением задания, поступающего с выхода элемента 4 задержки, который соединен также с минусовым сумматора 5 и разомкнутом контактом реле 3. Задатчик 1 связан с входом элемента за держки , плюсовым входом сумматора 5, входом реле 3 и разомкнутым контактом реле 2, вход которого соединен с выходом ПИ регулятора 6. На входы сумматора 7 поступают выходные сигналы сумматора 5 и ПИ регулятора 6. При постоянном значении задания выход сумматора 5 равен нулю и поэтому на выходе сумматора 7 сигнал раве .выходному значению ПИ регулятора 6, т.е. устройство работает как обычный ПИ регулятор. При изменении задания на выходе сумматора 5 формируется сигнал х, равный разности предыдущего . текущего х значений сигнала задатчика помноженного на коэффициент К I/Kg (К - коэффициент передачи объекта). На входе сумматора 7 появляется корре тируощии сигнал ЗЙА ЗаА ( ЛЭ Г 92 64 При настройке времени элемента , равной времени запаздывания объекта, на вход сумматора 7 корректирующий, сигнал поступает с момента изменения задания до момента начала изменения контактируемого сигнала на выходе объекта, т.е. запаздывание объекта по существу скомпенсировано. Возможный статизм системы, связанный с нестационарностью коэффициента усиления системы, устраняется И-составляющей регулятора. При работе регулятора в режиме Ручное контакты реле 2 и 3 в нижнем положении, выход регулятора перекрыт. Реле 3 замыкает между собой минусовый и плюсовый входы сумматора 5, на выходе которого формируется нулевое значение корректирующего сигнала. Пневматический сигнал -.задатчика 1 через реле 2 поступает на вход сумматора 7 t далее без изменения появляется на его выходе. На фиг. 2 приведен вариант резлизации принципиальной схемы пневматического регулятора, собранной на базе станции управления прибора ПВ 10.13. Регулятор состоит из переключающих реле 2, 3 и 8, сумматоров 5 и 7, задатчиков 1 и 9 давления, повторителя 10, подключенного к выходному ка-. налу 11 повторителя 12, пневмоемкости 13, переменных дросселей 1Vi6, постоянных дросселей , измерителей плат 26 и 27 со штуцерами 28-3 и регулятора 6 . Регулятор работает следующим образом. Автоматическое управление; управляющее давление на реле 8 подано, верхнее сопло реле 3 закрыто, ПИ регулятор 6 включен.(на фиг. 2 не показан) . Выход регулятора со штуцера 28 платы 26 подключен к реле 8 и плюсовой камере сумматора 7. Давление с задатчика 1 через открытое верхнее сопло реле 2 поступает в плюсовую камеру сумматора 5 и -измеритель , вход реле 3 и на элемент задержки состоящий из переменного дросселя Ни емкости 13. Выход элемента задержки связан со входом повторителя 10 и реле 3. Выход повторителя 10 подключен к штуцеру 32 панели 26 ПИ регулятора к нижнему соплу реле 8 и через дроссельный делитель, состоящий из дросселей 15, 18, в минусовую камеру 59 сумматора 5i который представляет собой усилитель с коэффициентом усиле ни я больше единицы .за счет делителя, iсостоящего из дросселей 19 и 20 в цепи обратной связи, т.е. разность давлений с задатчика и элемента задержки может измениться от 0,3 до 3,0 кгс/см. Выход сумматора 5.срчзан с плюсовой камербй сумматора 7 выход которого подключен через повторитель 12 на исполнительный механизм канала 11 и измеритель 2h. С задатчика 9 давление поступает в минусовую камеру сумматора 7 и через дроссельный делитель, состоящий из дросселей 16 и 22, в плюсовую камеру сухматора 5. Коэффициент деления делителя 16, 22 равен коэффициенту усиления сумматора 5 и это необходимо для того чтобы получить значение корректирую|Щего сигнала как положительное, так и отрицательное. т При изменении задания с задатчика 1 на выходе сумматора 5 формируется корректирующий сигнал, равный разности предыдущего и текущего значений сигнала задатчика, помноженного на ко эффициент К I/KQ, настраиваемый делителем на дросселях 15 и 18. При настройке времени задержки объекта (элементом задержки l, 13) равного времени запаздывания объекта на вход сумматора 7 корректирующий сигнал поступает с момента изменения задания до момента изменения контроли руемого сигнала на выходе объекта, т.е. запаздывание объекта скомпенсировано./ При ручном регулировании управляющее давление подано на отключающий вход регулятора и реле 2 и 3. Поэтому давление с задатчика 1 через верхнее сопло реле 3, повторитель 10, нижнее сопло реле 8 проходит в плюсовую камеру сумматора 7. Реле 3 соединяет вход регулятора с выходом элемента за держки 13, I, а величина корректирующего сигнала будет равна нулю, т.е. Система работает в режиме ручного управления . Операции перехода с одного режима регулирования на другой (ручное - автоматическое, программное - ручное и т.д.) не отличаются от данных в ин66струкции к станции управления прибора ПВ10.13. Испытание регулятора на г.невматическом стенде, моделирующем реальный объект регулирования, показывает, что применение isro в САР позволяет в 1,5 2,5 раза уменьшить время переходного процесса и свести к нулю динамический выброс. Формула изобретения Пневматический регулятор, содержащий переключающее реле, разомкнутый контакт которого подключен к выходу задатчика, а замкнутый - к выходу пропорционально-интегрального регулятора, канал параметра которого соединен с входным каналом регулятора, а канал управления переключающего реле соединен с первым каналом управления регулятора, отличающийся тем, что, с целью исключения динамической ошибки переходного режима при изменении задания, в нем установлены элемент .задержки, два сумматора и второе переключающее реле, причем выход задатчика. подключен к плюсовому входу первого сумматора и входу второго переключающего реле, разомкнутый контакт которого соединен с выходом элемента задержки, входом подключенным к выходу задатчика, минусовым входам первого сумматора и каналам зада-г ния пропорционально-интегрального регулятора, канал отключения которого и канал управления второго переключающего реле соединены с вторым каналом управления регулятора, выход первого сумматора и выход пропорционально-интегрального регулятора соединены с входами второго сумматора, выходом подключенного к выходному каналу регулятора . Источники информации, принятые во внимание при экспертизе 1.Техническое описание Панель управления пневматическая ПП12,2, завод Тизприбор. 2.Авторское свидетельство СССР по заявке If 259 960/1 В-П, кл. G 05 В И/Ц, 1977 (прототип).
