Изобретение относится к области средств автоматизации, а именно к пневматическим самонастраивающимся регуляторам с эталонной моделью и может быть применено в локальных сис темах автоматического регулирования, для нестационарных объектов с запаздыванием в нефтехимической, нефтеперерабатывающей и других отраслях промышленности. Наиболее близким техническим решение к данному является пневматический адаптивный регулятор, содержа щий первый элемент сравнения, камеры которого подключены к каналам параметра, задания и опорного давления, а выход через эталонную модель - к плюсовой камере второго элемента сравнения, минусовая камера которого соединена с каналом параметра,- регулирующий блок, входные каналы которого соединены с каналами параметра, задания и опорного давления, а выход ной канал через усилитель мощности с выходным каналом регулятора, и блок адаптации 1. Недостатком известного регулятора яёляется то, что время запаздывания объекта управления не учтено в блоке адаптации, что приводит к уменьшению Области устойчивости процесса самонастройки при регулировании нестационарных объектов с запаздыванием, Цель изобретения - расширение области устойчивости регулятора при регулировании нестациорнарных объектов с запаздыванием. Это достигается TeMt, что в регуляторе блок адаптации содержит сумматор, элемент ИЛИ, элемент сравнения, задатчик, узел запаздывания, реле, интегратор и клапан, управляющая камера которого соединена с выходом сумматора, входаз которого подключены к выходам задатчика, первого элемента сравнения, элемента ИЛИ и каналу опорного давления, выход второго элемента сравнения подключен к входам узла запаздывания, соединенного выходом через реле с входным каналом интегратора, дроссель и емкость которогчэ связаны через проточную камеру клапана, выход интегратора связан с регулирующим блоком, а управляющие камеры реле - с выходом элемента сравнения блока адаптации, связанным с каналом опорного давления и выходом первого элемента сравнения, . На -чертеже приведена принципиалг ная схема предложенного регуляторе..
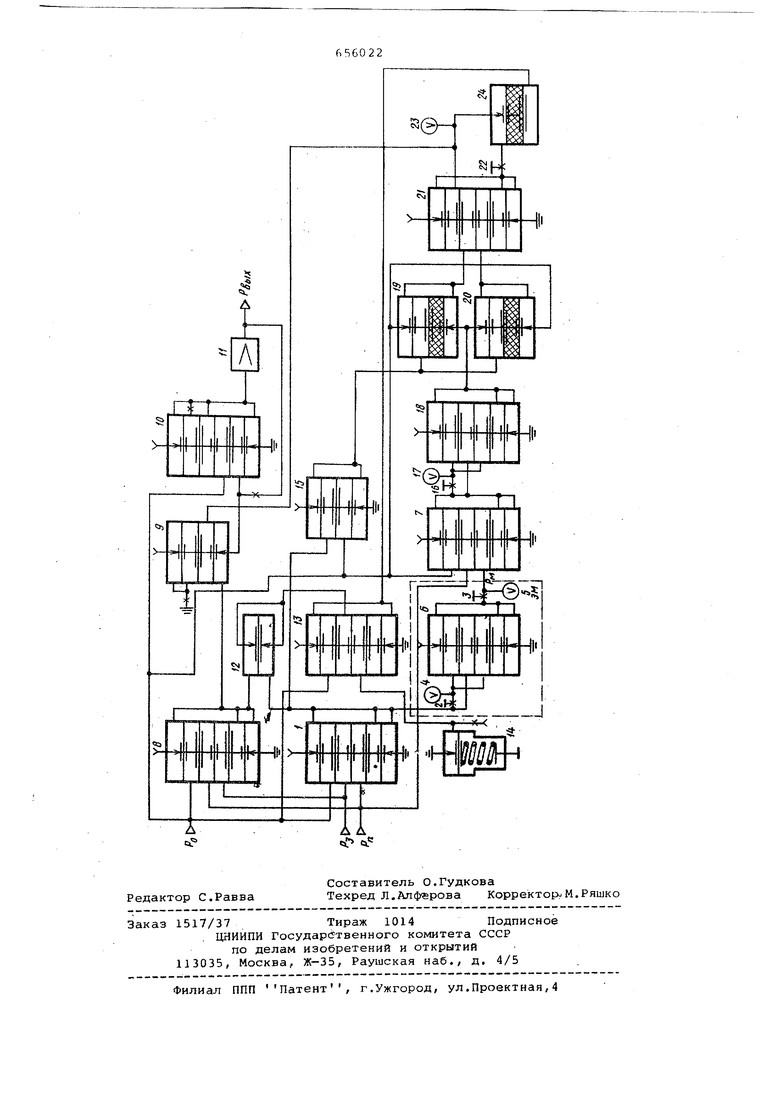
Регулятор содержит первый элемент сравнения 1, эталонную модель,содержащую переменные дроссели 2,3, емкости 4,5, элемент сравнения 6, второй элемент сравнения 7, регулирующи блок, содержащий элемент сравнения 8 управляемый дроссель 9 элемент умножения на постоянный коэффициент 10, усилитель мощности 11, блок адаптации, содержащий элемент ИЛИ 12, сумматор 13, задатчик 14, элемент сравнения 15, узел запаздывания, включающий переменный дроссель 16, емкость .17, элемент сравнения 18, ;реле 19/ 20/ интегратор, включающий элемент сравнения 21, переменный дроссель 22, емкость 23, клапан 24.
Регулятор построен на стандартных элементах промышленной пневмоавтоматики.
Регулятор работает следующим образом.. :
в элемент сравнения 1 по каналам параметра, задания и опорного давления подается давление, пропорциональ.ное значению параметра: Р - заданному и РП - текущему (переменному) и ;цавление - Рд . На выходе элемента 1 имеемдавление ,, , равное
Рвых1 РХ+ РО РХ« РП- РЗ- С элемента 1 давление Pgbj. проходит через эталонную модель, включающую узел запаздывания {2,4,6} и апериодическое звено (3,5), и поступает в плюсовую камеру второго элемента сравнения 7. На втором элементе сравнения 7 давление ff сравнивается .с выходным сигналом эталонной модели , а полученное рассогласование Pg подается на узел запаздываний блока адаптсй1ии. Эталонная модель .реализует функцию в виде е
Р/л---(
М R or
при помощи элементов 2,3,4,5,6, а на выходе элемента сравнения 7 имеем давление в виде
РВЫХ 7 %+ РО РПДавление, РВЫ, проходит узел запаздавания, собранный на элементах 16, 17,18 и с PQ через реле 19,20 поступдет в зависимости от P bixts плюсевую и минусовую камеры з)Л ъ1ента сравнения интегратора 21. Управляющий сигнал формируется в элементе сравнения 15 в виде
Г1 при ,
ЪЫШВ
IQ при РХ+ .
Регулирующ чисть регулятора ре-г ализует следующий алгоритм управления
РСЫХ с о e-pt
К- PpSi&nV,
с е g
„ Г-И при P,t О, где sign РХ «. „р р/ о.
Kg - адаптивный коэффициент усиления регул ятс)а;
РХ - сигнал рассогласования. Интегратор реализует следующее выражение: р-р
V о с S4D П tu OOIX i rp 4-3 t о л
П
Между емкостью и переменным дросеелем интегратора включен клапан, который управляется при помощи ко андного давления Р,,м«13 с выхода сумматора 13.
Элементы сравнения 1 и 8 включены по схеме суммирования давлений Р,, РЗ и РО, а элемент ИЛИ включен по схеме выбора максимального сигнала На выходе элемента ИЛИ .12 - модуль ошибки системыPgj,,x,j, /РХ/ РО который поступает на минусовую камеру элемента сравнения 13.
Если учесть Z тогда
. Р ..„.. Р в
.0 при /РХ/ . Р,
ВЫХ.1Э
в
где PQ - зона нечувствительности, которая устанавливается при помощ задатчика 14. Если PQ то клапан размыкает обратную и давление в управляк щей камере управляемого дросселя остается неизменным (замораживается) до тех не меняется выход Когда
Ра «i/Pv/, тогдй клапан згиллкает обрат0 е
ную связь и в зависимости от изменения Р)( изменяется выход интегра эра, что в свою очередь из/леняет давление, поступающее от интегратора к управляющей камере управляемого дросселя.
Изменение этого давления приводит к изменению коэффициента усиления Кс регулятора.
Алгоритм с амонастройки найден с помощью метода функции Ляпунова, который гарантирует устойчивость процесса адаптации коэффициента усиления регулятора в полном диапазоне изменения параметров управляемого объекта с запаздыванием.
Формула изобретения
пневматический адаптивный регулятор содержащий первый элемент
сравнения, камеры которого подключены к каналам параметра, задания и опорного давления, а выход через эталонную модель - к плюсовой камере второго элемента сравнения минусовая камера которого соединена с каналом параметра, регулирующий блок, входные каналы которого соединены с каналами параметра задания и опорного давления, а выходной канал через
усилитель мощности с выходным каналом регулятора, и блок адаптации, отличающийся тем, что, с целью расширения области устойчивости регулятора, в нем блок адаптации содержит сумматор, элемент ИЛИ эле
мент сравнения, задатчик, узел запаздывания, реле, интег,ратор и клапан, управляющая камера i oToporo гоедийена с выходом сумматора, входы которого подключены к выходам задатчика, первого элемента сравнения , элемента ИЛИ и каналу опорного давления, выход второго элемента сравнения подключен к входам узла запаздывания, соединенного выходом через реле с входным каналом интегратора, дроссель и eMKOCTiv которого связаны через проточную камеру клапана, выход интегратора связан с регулирующим блоком, а управляющие камеры реле - с выходом элемента сравнения блока адаптации, связанным с каналом опорного давления и выходом первого элемента сравнения.
Источники информации, принятые во внимание при экспертизе
1. Адаптивный пневматический регулятор для регулирования гидродинамического р0жима адсорбционной колонны (рис,2,3), Разработка теории, методов и средств адаптивного управления технологическими процессами, с. 9, 12-14. Министерство приборостроения, средств автоматизации и систем управления, Научмо-техинческий совет, секция информационных и управляющих систем, М., 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Пневматический пропорциональный регулятор | 1978 |
|
SU746412A1 |
| Пневматическое управляющее устройство для регулирования температуры и уровня куба ректификационной колонны | 1978 |
|
SU752243A1 |
| Адаптивный пневматический регулятор | 1977 |
|
SU661505A1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| Пневматический финитный регулятор | 1988 |
|
SU1522151A1 |
| Пневматический регулятор | 1976 |
|
SU582494A1 |